 Robin Fröjd
Robin Fröjd
Gripper planning, I think a flex joint is needed which lets the gripper go up when on the ground.
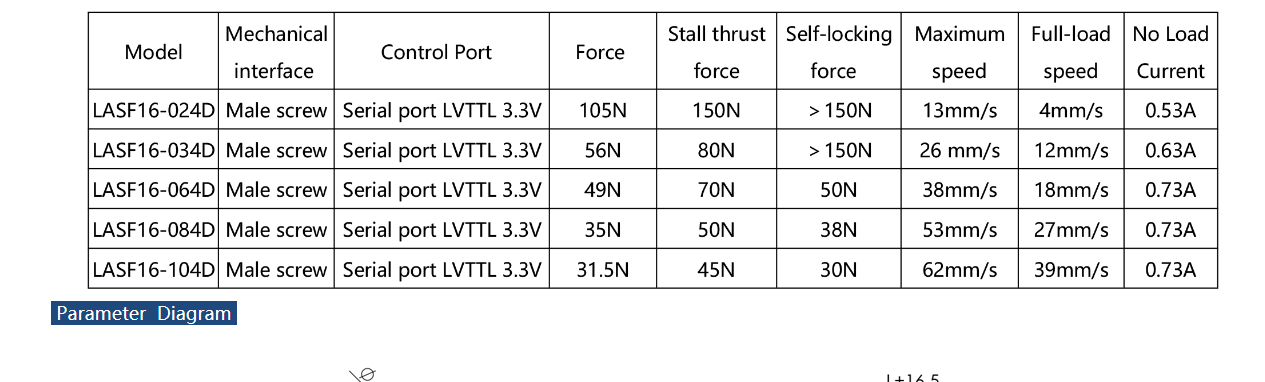
Each claw is planned for be double jointed. The most suited micro linear actuators I could find was the LASF16-104D. Which also provides force feedback.
They have the follow specs:
#k3lso #quad #quadruped #robtics #fusion360 #ros #mjbots #tmotor #prototype #UPXtreme #MIT #cheetah https://t.co/dem0ickzV0
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.