Robin Fröjd
Robin Fröjd-
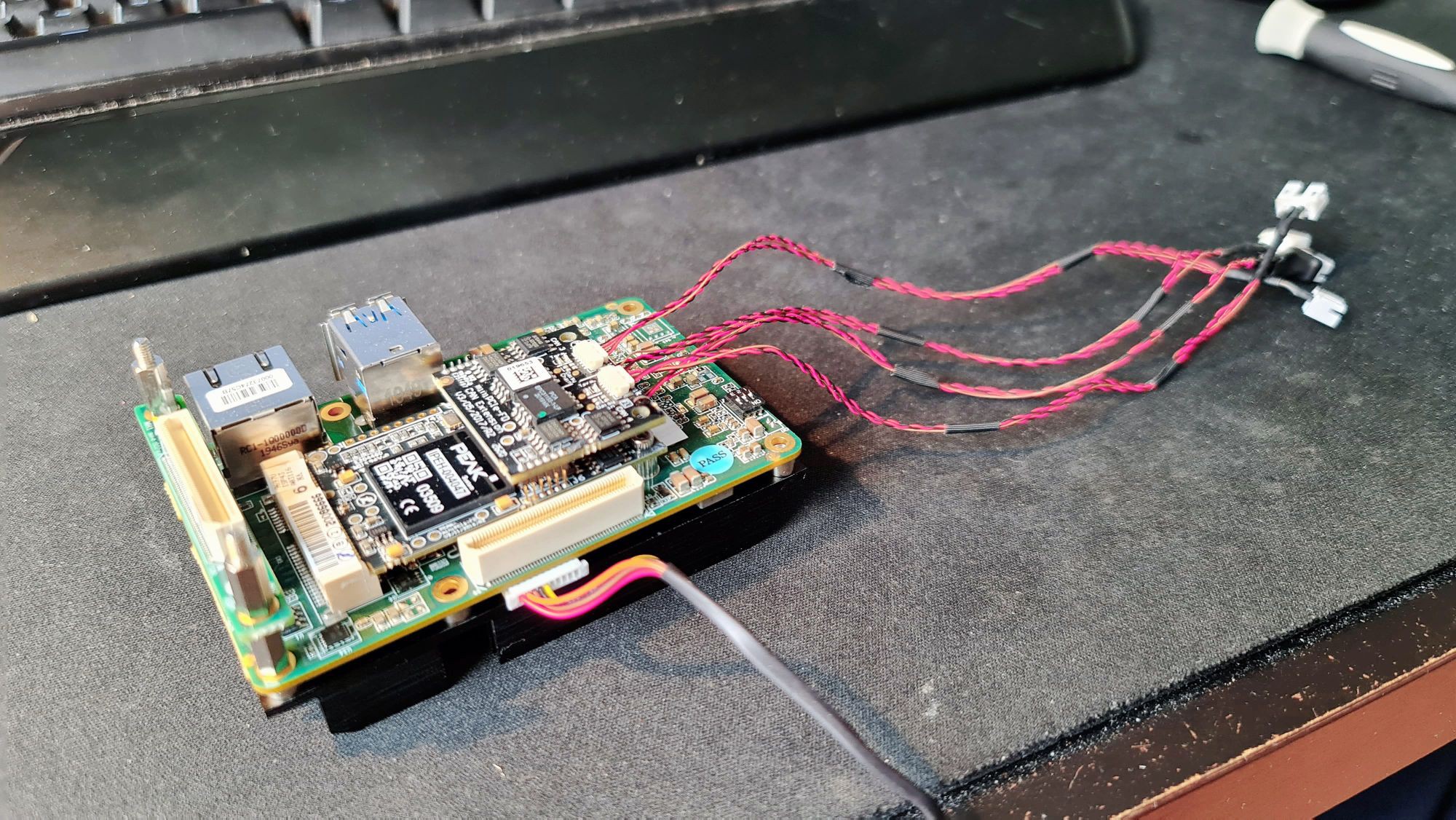
#5Khz x 12
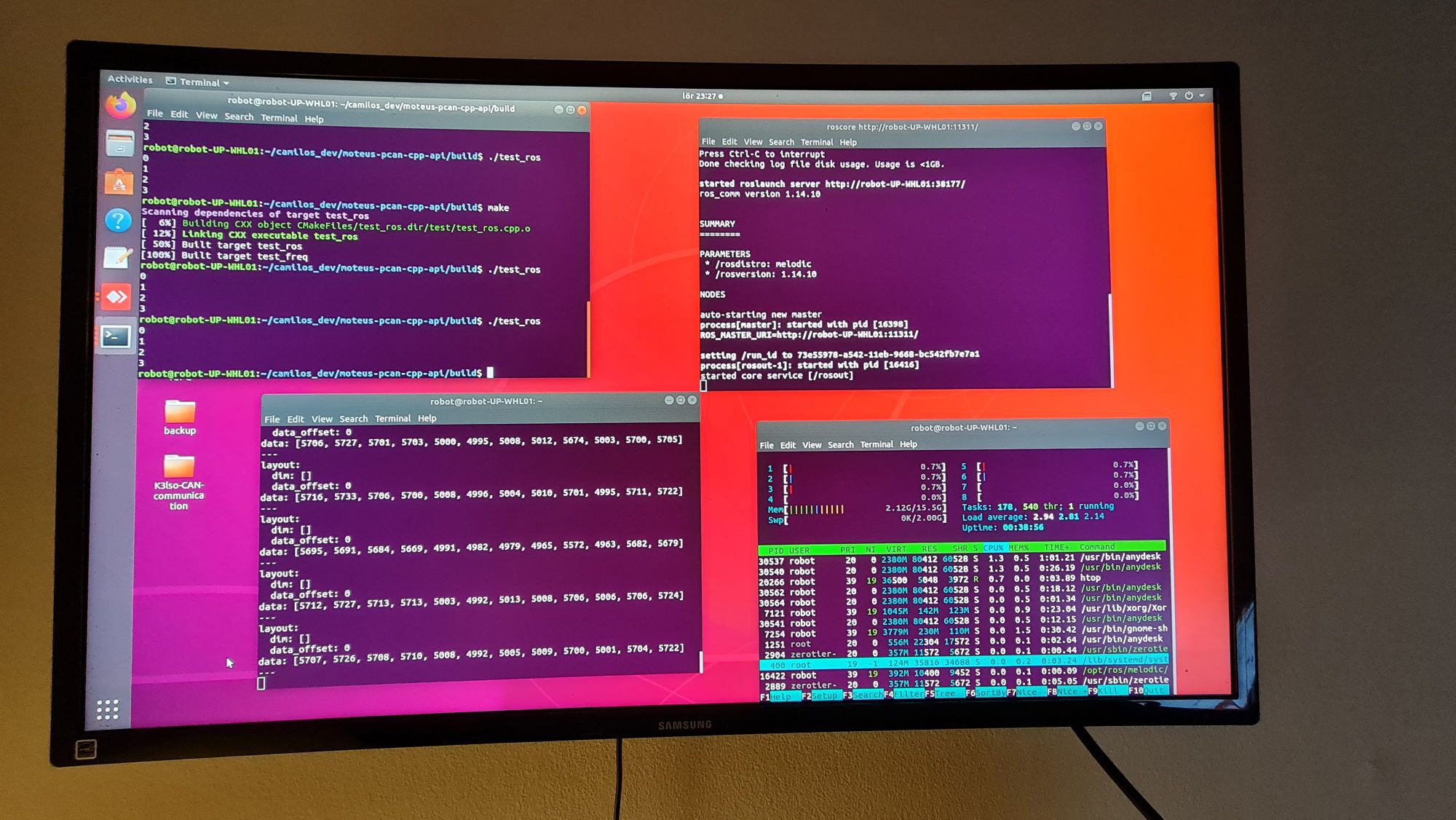
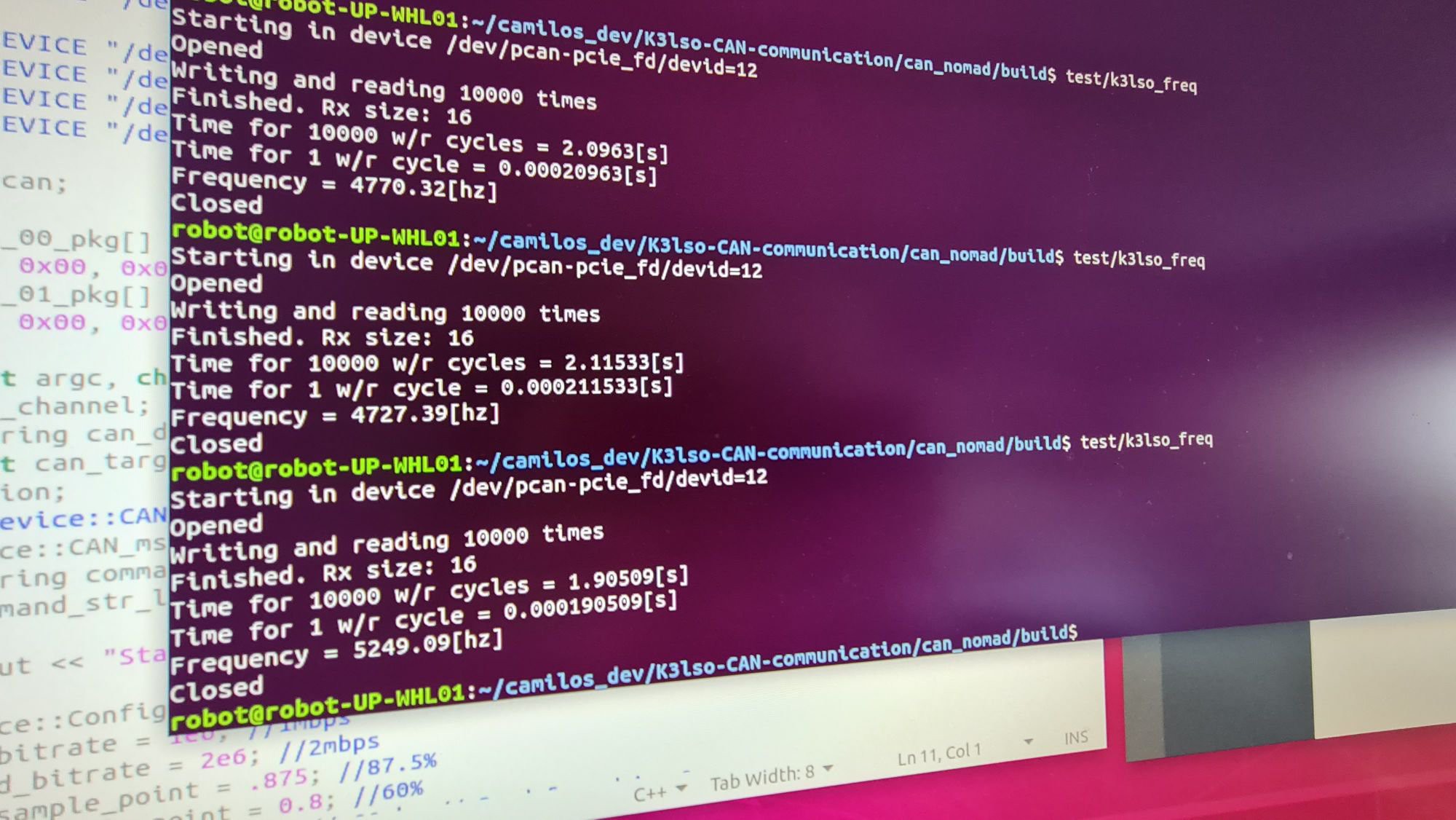
04/24/2021 at 21:42 • 0 commentsYep we hit #5Khz for each motor reading data from 12 servos over 12 FD-can channels!
![]()
-
Top cover
04/24/2021 at 13:40 • 0 commentsPlug for Carbon fiber top cover in the progress!
![]()
-
On his feets
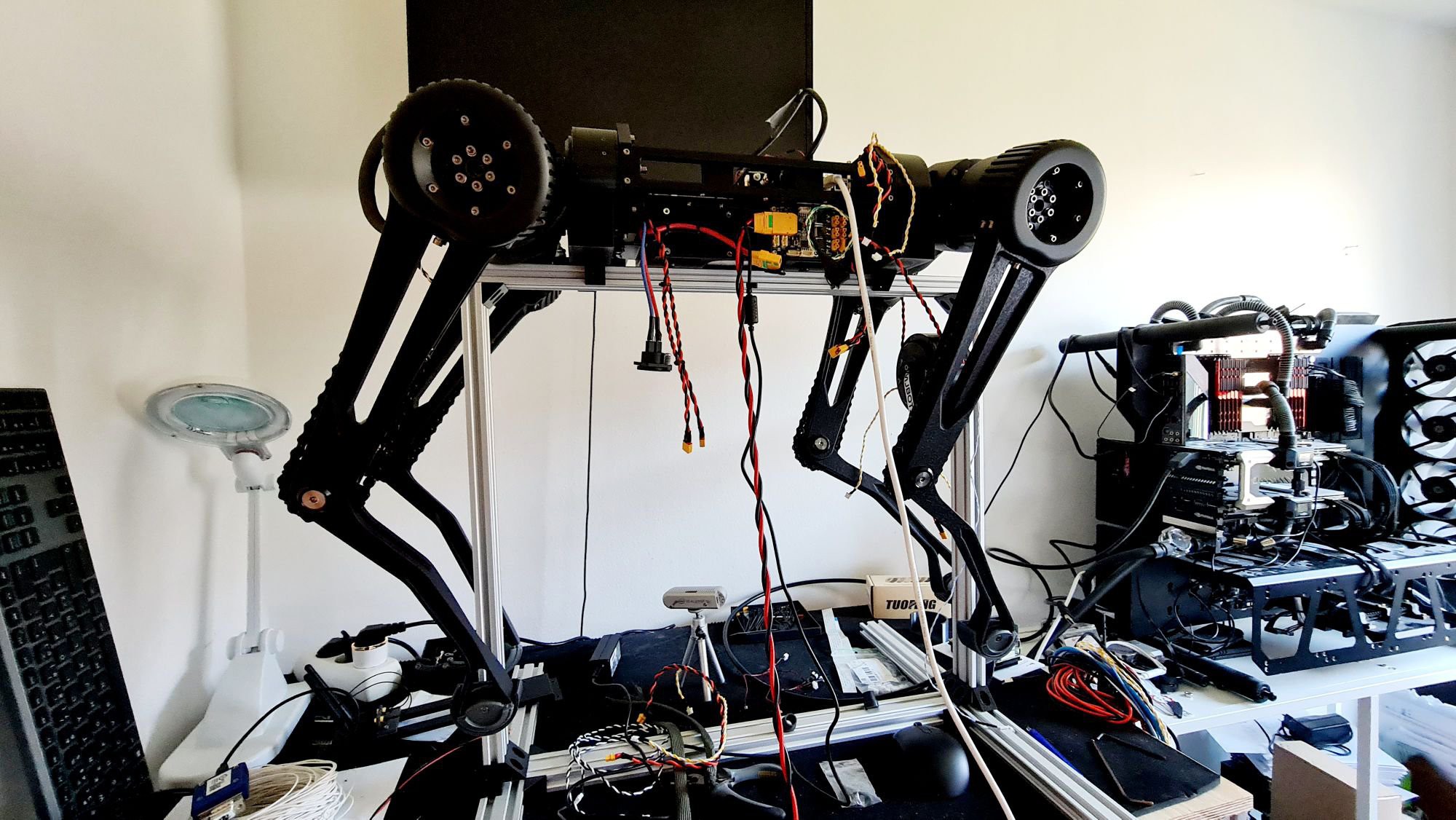
04/22/2021 at 20:02 • 0 commentsA big milestone for me! I started this project about 7 months ago and today is the first time #k3lso stands on his own feets!
The consumption is 1A @36v for stand.
More to come later on!
the specs:
Acuator peak torque: 54Nm
Robot target weight: 18kg (at the moment 16.9kg without cover, battery included)
Onboard computer: UP Xtreme i7C1-8565U running Ubuntu 18.04
Modifed kernel: 5.4.65 with PREEMPT_RT patch and full control for GPIO header.
CAN (12-Channels): PCAN-M.2 4 Channels, 2 x PCAN-miniPCIe FD 4 Channels.
Battery: 10S3P 9000mAh (1.5KG)
Body structure: 7075 aluminium
Legs: Milled Carbon Fiber
Knee transmission: Chain with mechanical advantage of 1.4.
Voltage: 10S
If you like to see more progress on my build you can follow me on Twitter: R_frojd
#quad #quadruped #robotics #UPXtreme #Realsense #ROS #spot #mit #cheetah #bostondynamics #mjbots #GTC21 #Nvidia #GTC #NVIDIAGTC #NVIDIA #GTCwithMe #leggedrobotics -
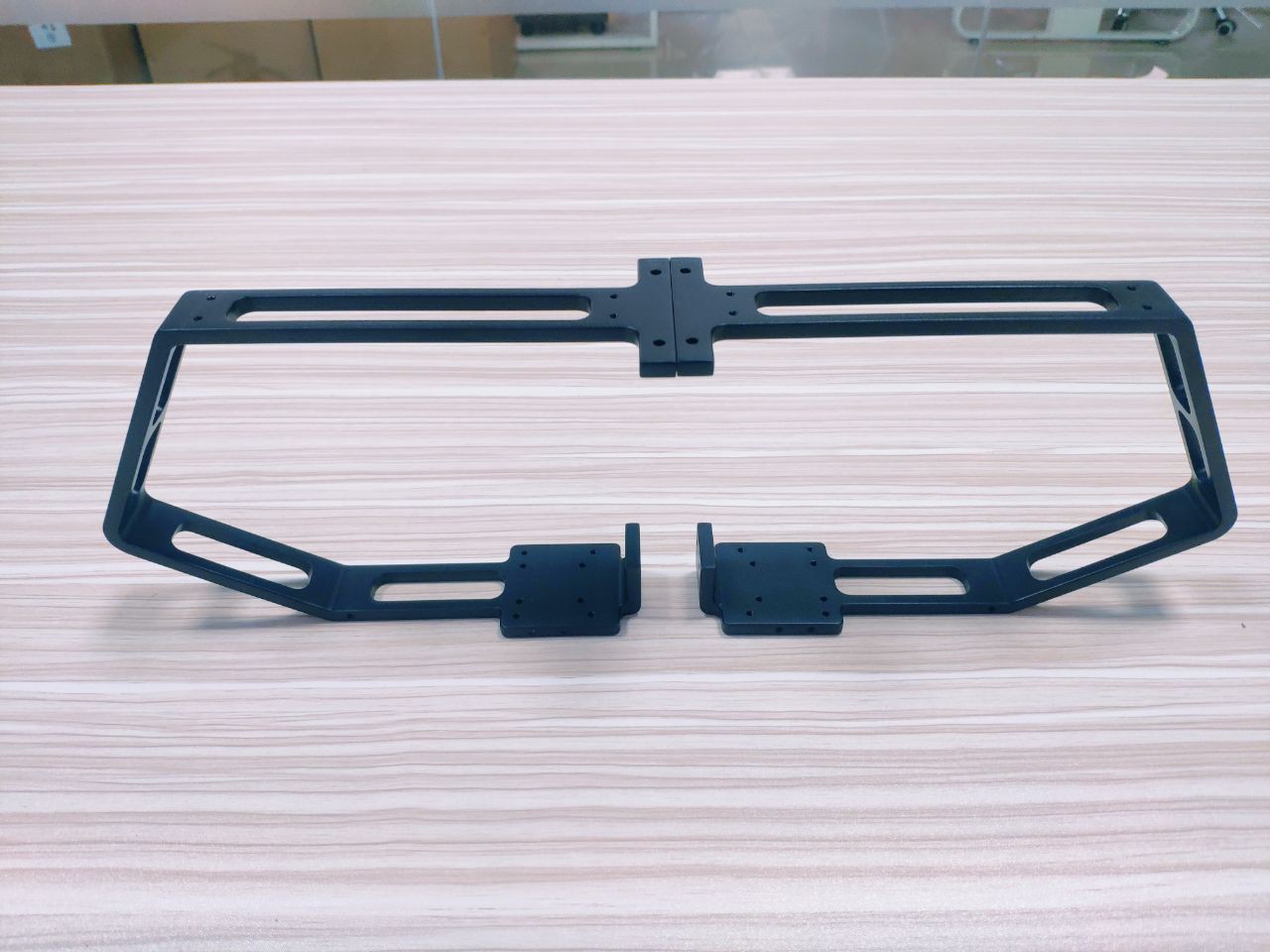
Impact bars
04/22/2021 at 19:59 • 0 commentsImpact bars ready!
![邏]()
![]()
![]()
![]()
#k3lso #quad #quadruped #robotics #ros #MIT #Cheetah #cnc #milling #prototype #Robots #Engineering
-
#5kHz
04/22/2021 at 19:58 • 0 comments -
BEC
04/22/2021 at 19:57 • 0 comments -
Adapter cables
04/22/2021 at 19:56 • 0 comments -
New PD
04/22/2021 at 19:55 • 0 comments -
The first stand
04/01/2021 at 14:07 • 0 commentsA big milestone for me! I started this project about 7 months ago and today is the first time #k3lso stands on his own 4 feets!
This project has included many late nights and literally all my own free time (and will continue to do so) :-)
The consumption is 1A @36v for stand.More to come later on!
the specs:
Acuator peak torque: 54Nm
Robot target weight: 18kg (at the moment 16.9kg without cover, battery included)
Onboard computer: UP Xtreme i7C1-8565U running Ubuntu 18.04
Modifed kernel: 5.4.65 with PREEMPT_RT patch and full control for GPIO header.
CAN: PCAN-M.2 4 Channels
Loop frequency / motor : 1KHz
Battery: 10S3P 9000mAh (1.5KG)
Body structure: 7075 aluminium
Legs: Milled Carbon Fiber
Knee transmission: Chain with mechanical advantage of 1.4.
Voltage: 10SIf you like to see more progress on my build you can follow me on Twitter: R_frojd
#quad #quadruped #robotics #UPXtreme #Realsense #ROS #spot #mit #cheetah #bostondynamics #mjbots #GTC21 #Nvidia #GTC #NVIDIAGTC #NVIDIA #GTCwithMe #leggedrobotics -
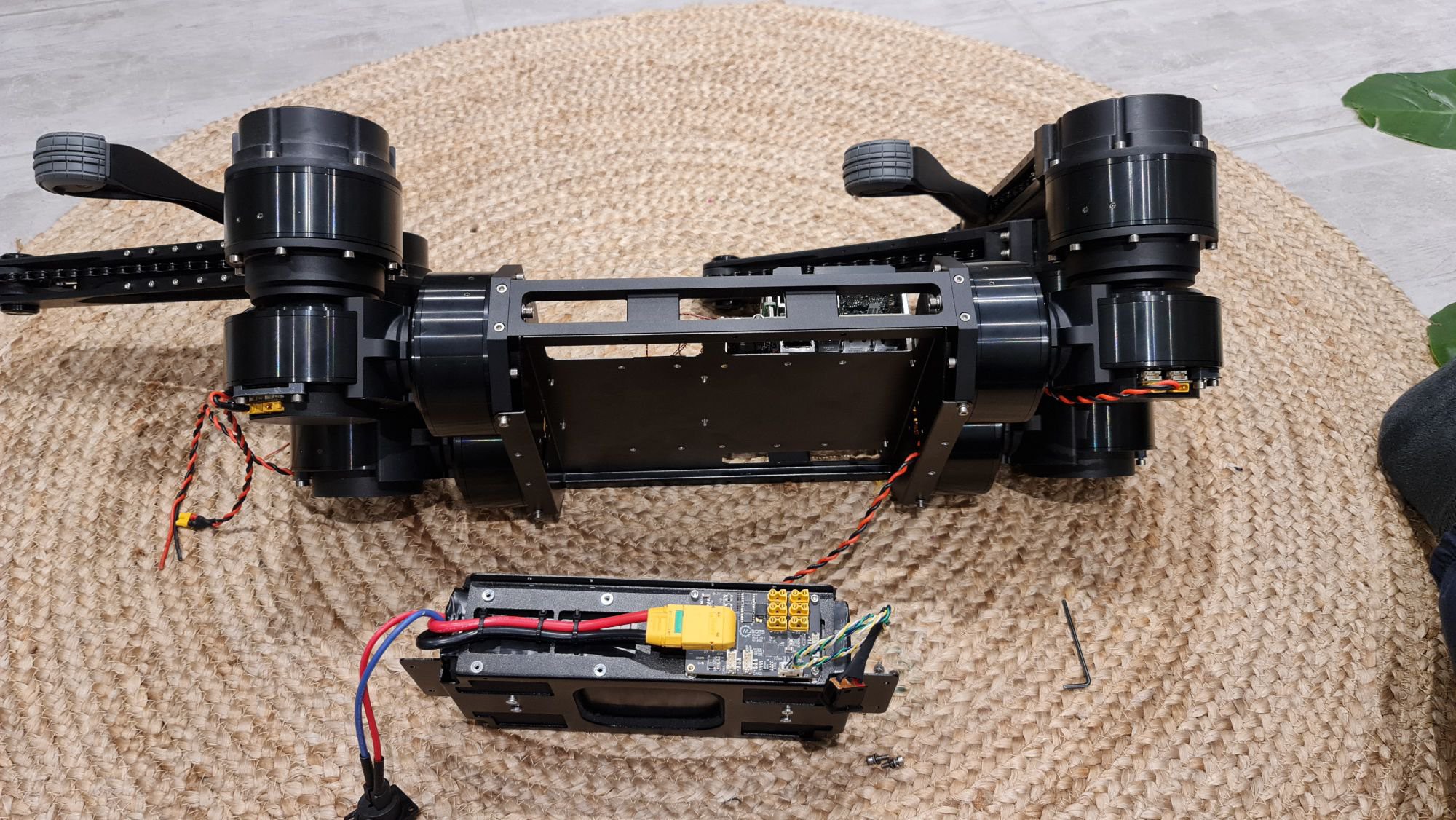
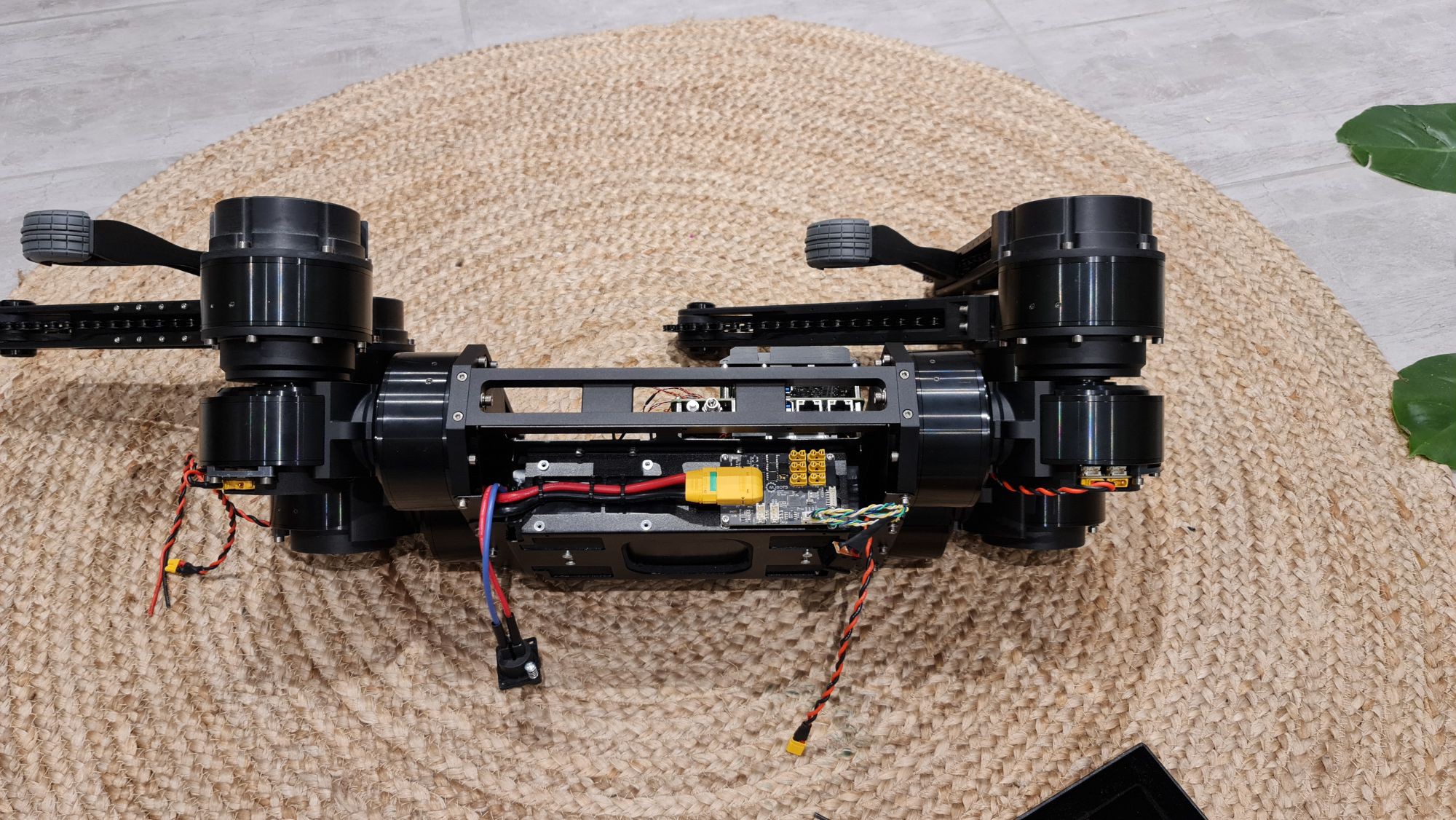
Battery assembly
03/25/2021 at 22:34 • 0 comments
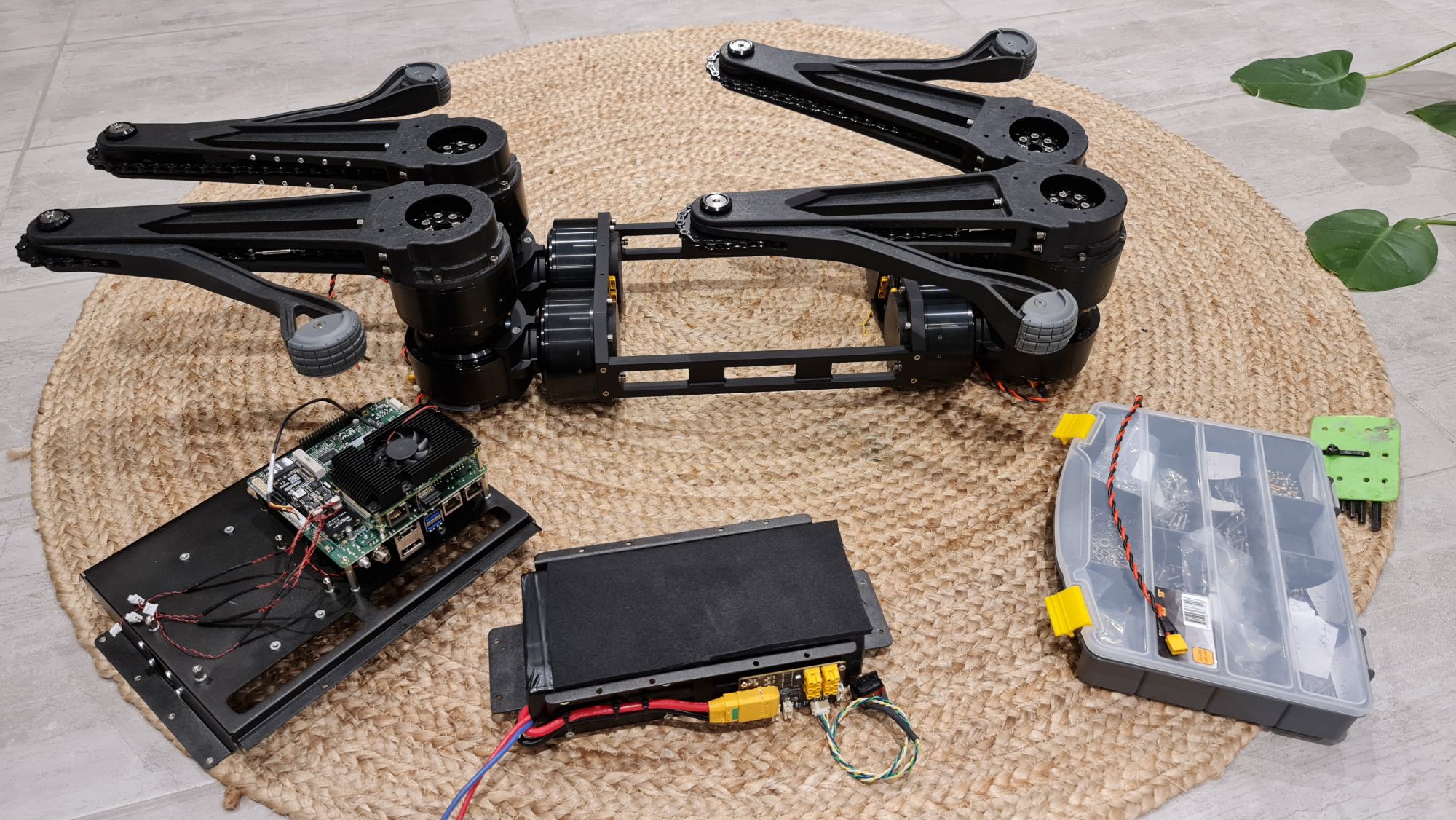
K3lso Quadruped
K3lso is a quadruped robot similar to MIT mini cheetah and MIT Cheetah 3.