Enrico Gueli
Enrico GueliThe original product can be found here: https://www.globalshop.com.au/products/flippity-fish
0%
0%
Hacking a Flippity Fish™️
Every time we turn on this new cat toy, our cat gets scared. Maybe it wiggles too much. So I hacked it.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
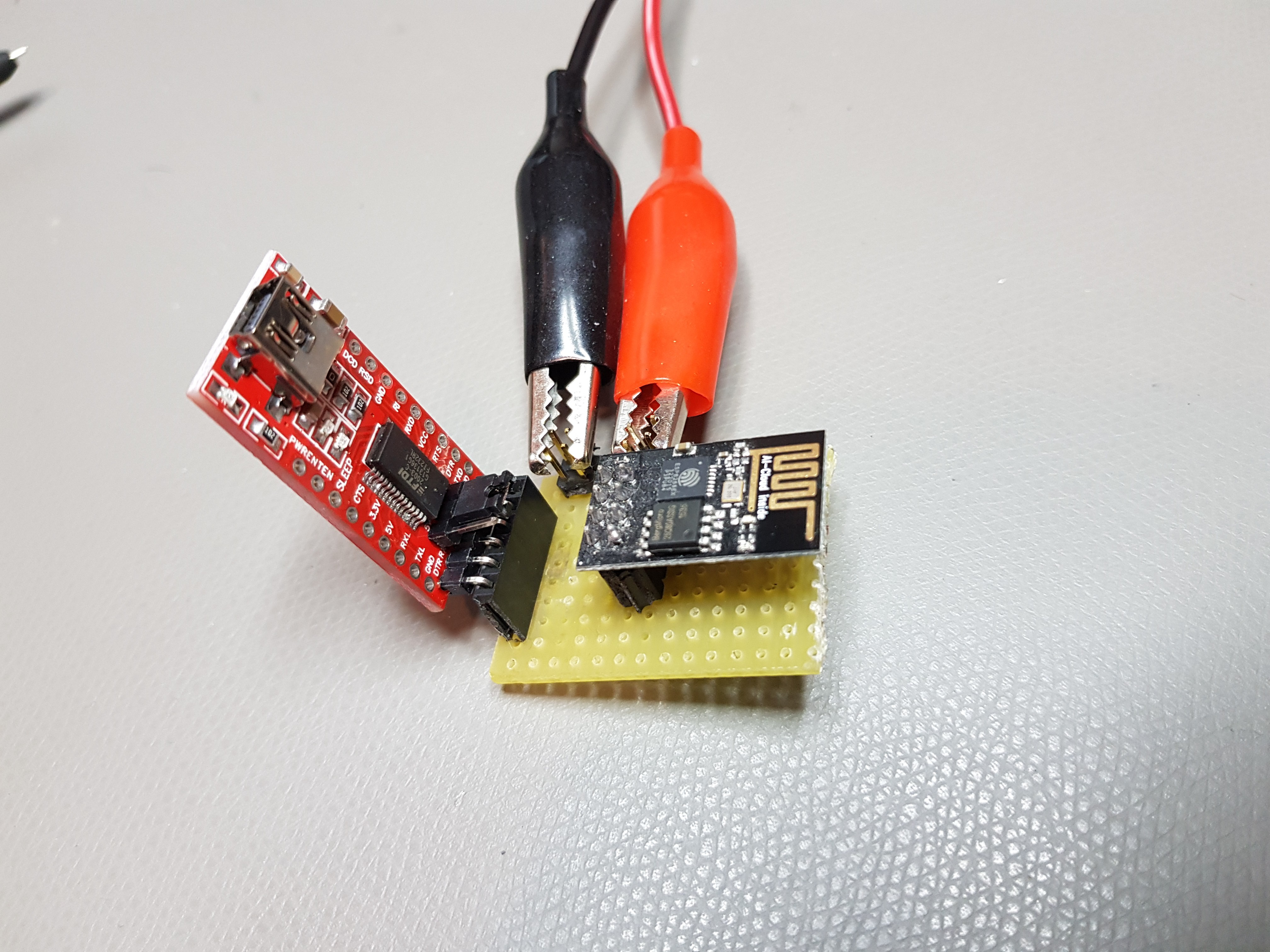 It's now WAY easier to program the ESP-01!
It's now WAY easier to program the ESP-01!
 Nicolò
Nicolò
 Alexander
Alexander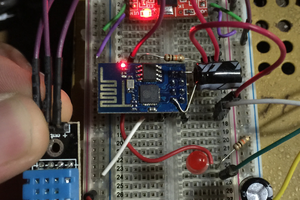
 xnakxx
xnakxx