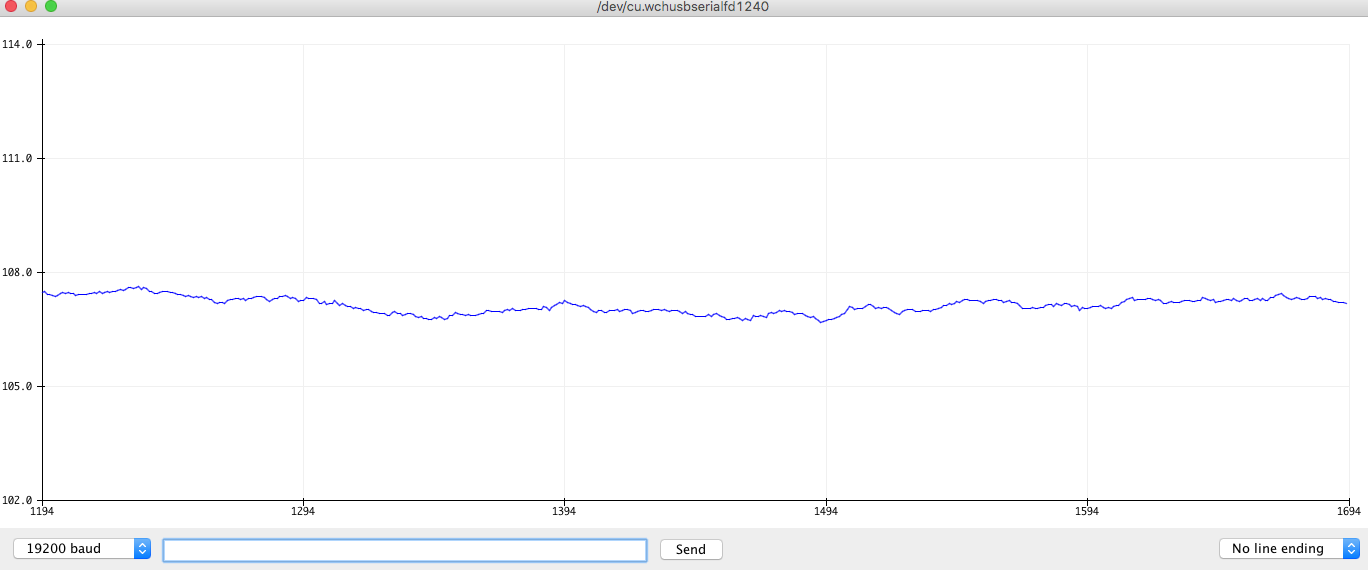
included files for filter_Sensor. includes example vl53l0x and my own noisefilterbox.h that has a function that reduces noise. this is from actual data from a lidar sensor VL53L0x with noise +/- 0.5mm at 30-50 samples a second. no tweaking the registers of the device yet.
this is using filter in Filtermode==3 and has an stable time of down to 4 seconds for a change of 150mm
here is same device at a different time without any filtering
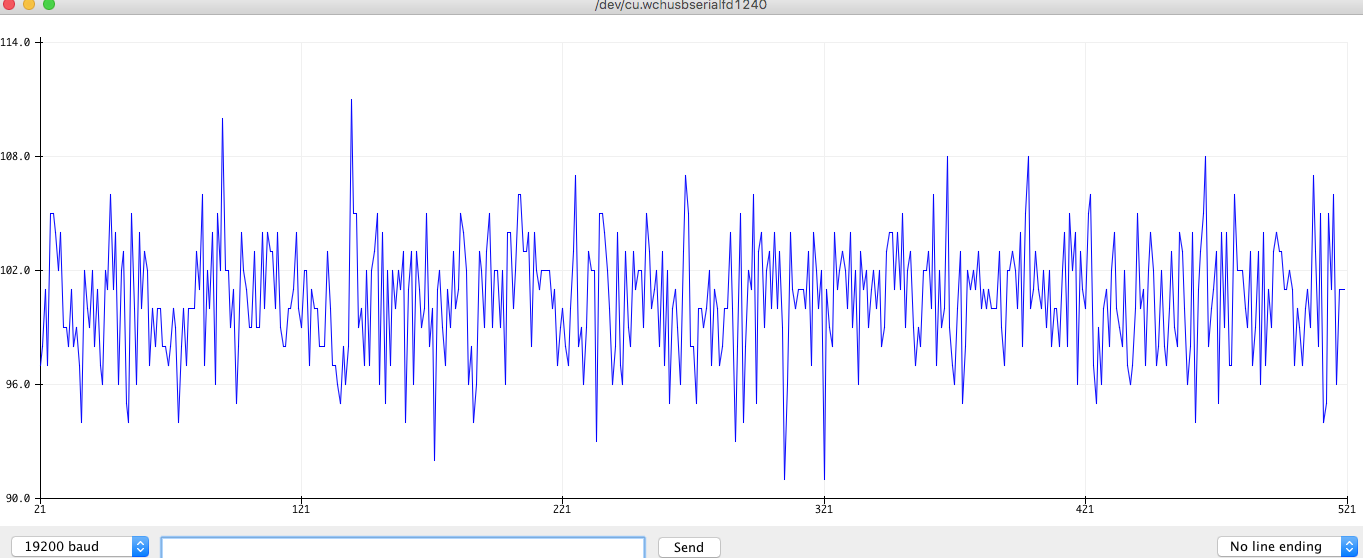
this filter adjusts quickly to change.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.