 finallyfunctional
finallyfunctionalI made a quick sketch of this idea. These sketches are just meant to explain the general idea.
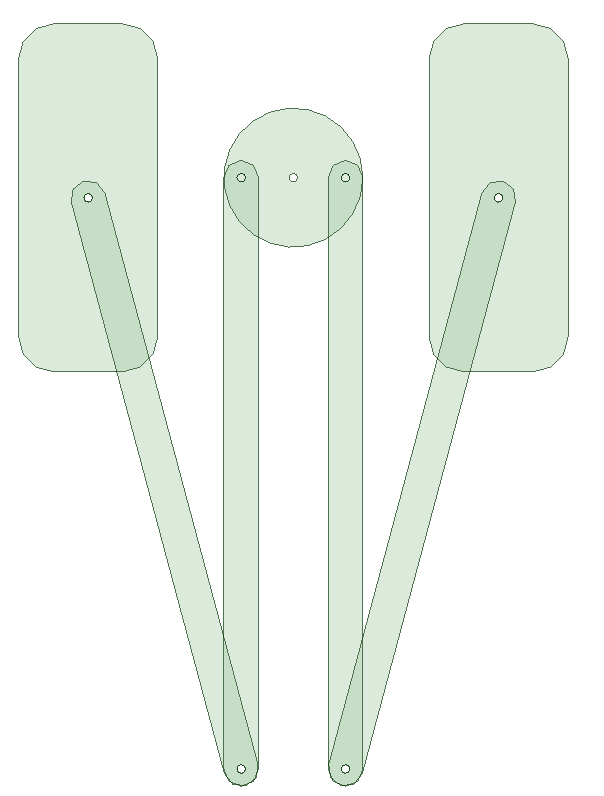
The two rectangles are VR shoes, similar to what I have already made. A shoe is coupled in its center to a pair of arms as shown. The ends of the arms and center of the shoe are pivot points, joints. As the user walks the arms will pivot around the joints. There is also a circle in the middle with a pivot point in its center to support the user being able to turn and walk in any direction.
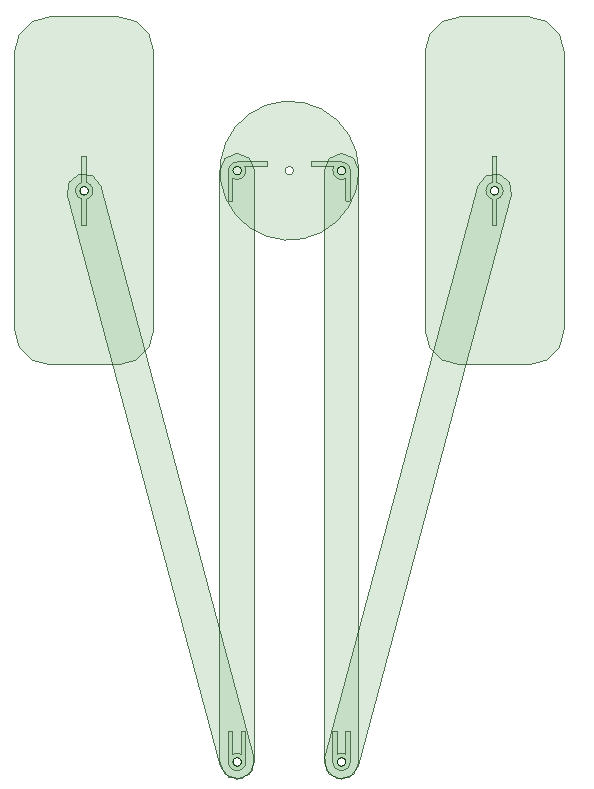
The idea is to put either motors or springs on the joints so that when the user extends his foot the motor or spring will pull the shoe back to the center. I illustrate the idea here with some torsion springs.
I imagined this being the default state of the arms, where they basically point backwards. However there may be a different default state that is better.
The next sketch adds some circles. These are meant to represent casters.
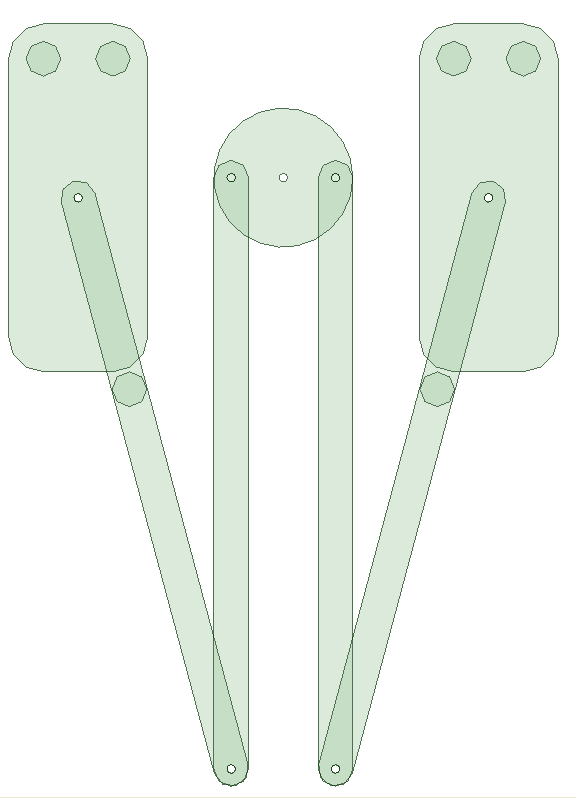
There are two casters at the front of each shoe and one on the arm, situated behind the shoe. I think with these casters and rigid joints the shoes will be stable.
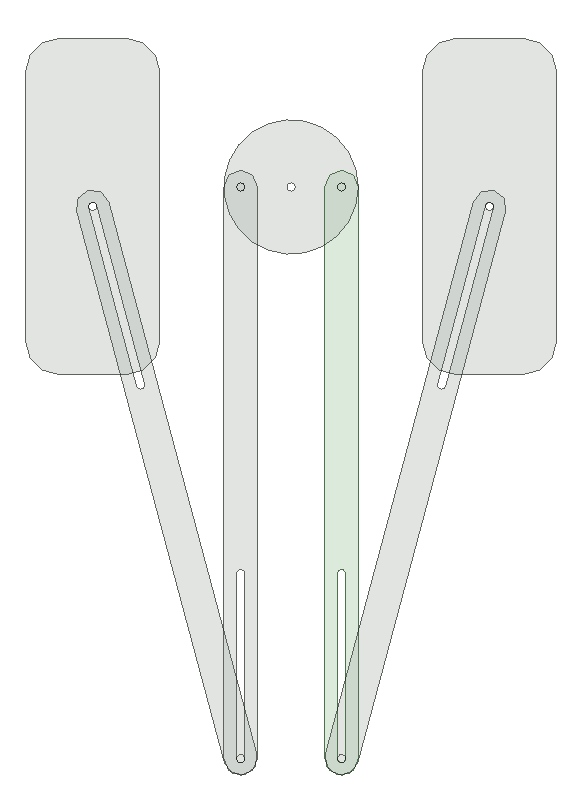
Finally, slits could also possibly be added to the arms to make them more dynamic and support more configurations. Linear actuators or compression/extension springs could be used to move the arms along the slits.
My thoughts on this concept are -
- Simple design. Could be active with motors at the joints or passive with springs.
- If springs are used the user will feel resistance when extending his foot away from the center, but it will help him bring his foot back. A balance for the resistance would be needed. Motors wouldn't have this issue.
- When the user is extending his foot, he could theoretically backdrive the motors and recharge the battery.
- The arms may get in the way or collide with each other when doing certain movements, like crossing feet.
- It's possible to collide with the center circular piece while walking.
- I'm not sure how well the center circular piece will turn with the user.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.