 EK
EKProblem
Mars rovers encounter problems in 2 main areas: Locomotion and Mission Operations.
Current exploration missions on Mars:
- Take a long time to cover a significant distance
- Are designed to avoid going in to wind storms
- Solar power generation impacted by dust storms
- Require extensive planning - not fully autonomous
For locomotion, wheels on Mars:
- Become stuck in sand
- Can be damaged by rocks
- Require intensive path planning
For locomotion, aerial approaches (eg, Ingenuity):
- Have limited payload capability
- Unstable for precise surface operations
- First iteration of technology being proven
Requirements
From this problem, a list of requirements were made:
- Move without requiring primarily electrically driven propulsion
- Travel longer distances
- Carry scientific payloads for sampling dust storms concentration
- Final system assembly possible by astronauts with gloves
- Reduce likelihood of becoming stuck on obstacles
- Passively navigate
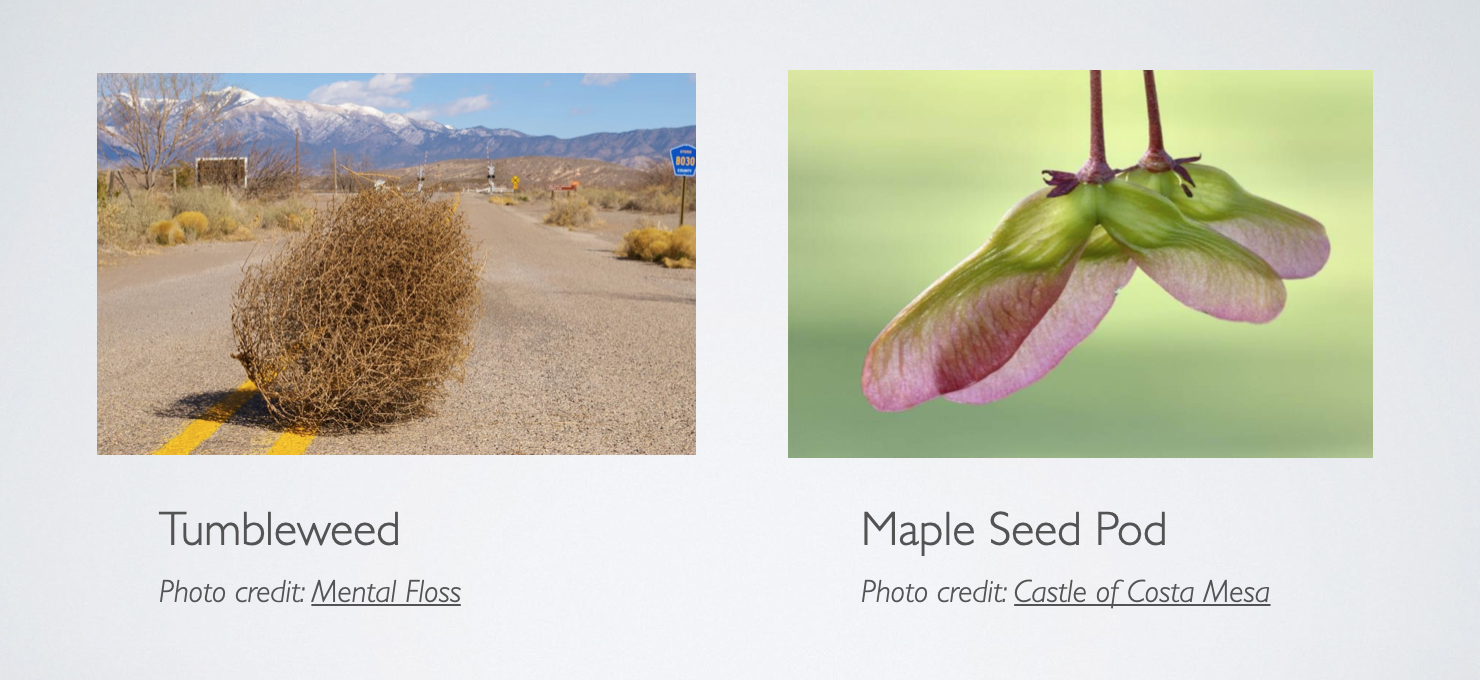
Bio-Inspiration
Tumbleweeds and Maple Seed Pods were referenced for bio-inspiration
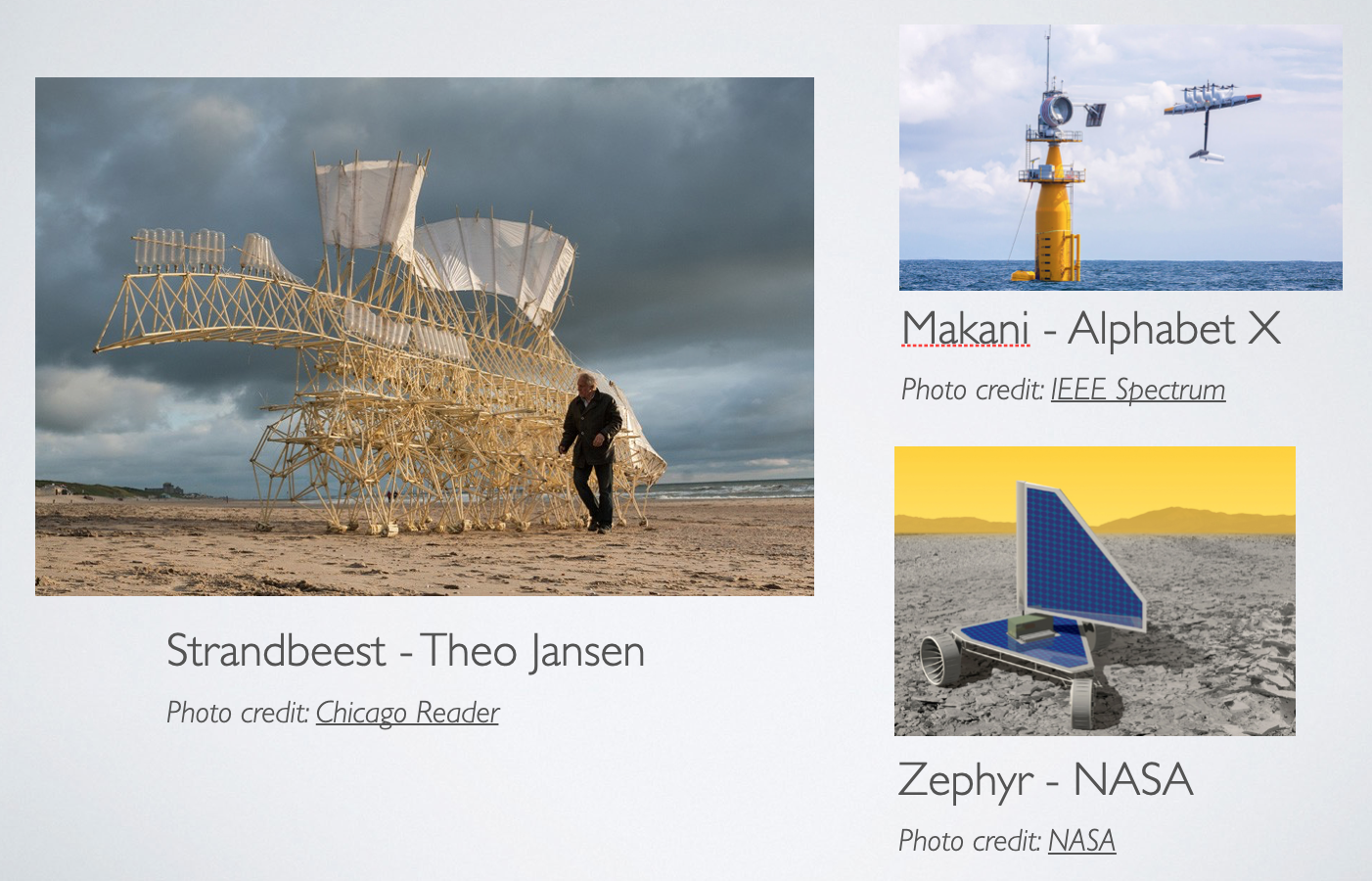
Design Inspiration
Strandbeest, Zephyr, and Makani were referenced for design inspiration
Human Exploration Application
- The MWTR would assist when colonies of habitats are established in a nomadic style (in the future)
- On the ground prospecting combined with data from orbiters
- Efficient method of exploration that does not need as much day to day mission planning
- Continue to operate in wind storm conditions
Engineering Objectives
- Determine feasibility of wind propulsion for planetary rovers
- Gather data relation between sail surface area, wind speed, distance, and time by conducting Field Tests
- Observe how this design handles obstacles, obtrusions, and steering
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.