 PabloCastillo17348
PabloCastillo17348Se utilizó como referencia lo que se pide en la sección 7.5.2 de la segunda edición del libro respectivo de la Toolbox de Peter Corke. Para ello se implementó una aplicación de Matlab que contiene los parámetros variables para cada una de las extremidades. En el caso de este robot son cuatro extremidades (patas) , cada una compuesta de tres juntas. A continuación se muestra la aplicación implementada.
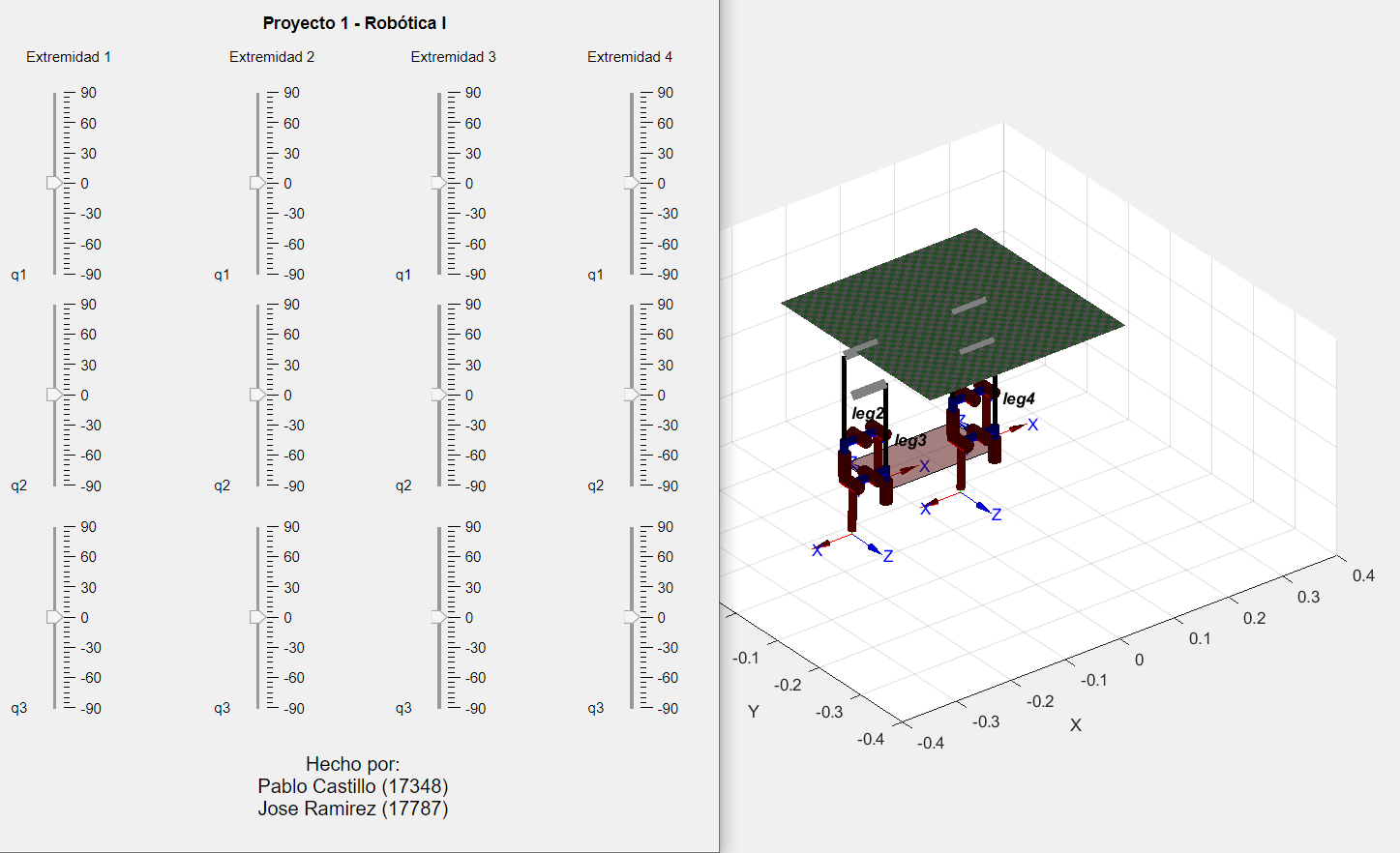
Cada uno de los slider representa a una posición del vector de configuración variable (deseado). Siendo q1 la posición para la base, q2 para la herramienta y q3 para el efector final.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.