0%
0%
Mars Ingenuity Helicopter
A 1:1 scale flying model of the Mars helicopter
 Nick Rehm
Nick RehmBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests








 Mike Turvey
Mike Turvey
 Mike Maluk
Mike Maluk
 Colin Kingsbury
Colin Kingsbury
 Oscar S.
Oscar S.
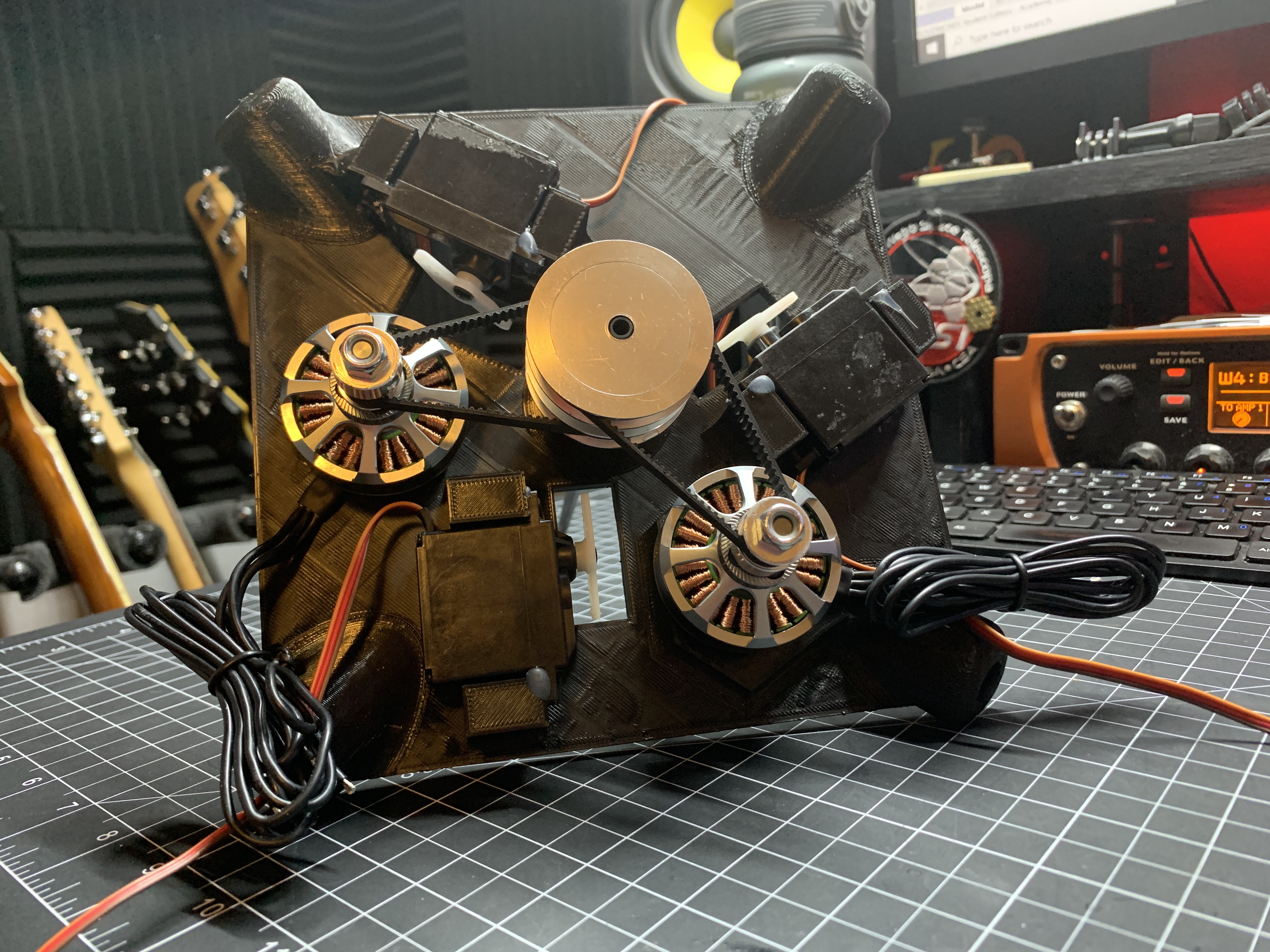
If you need some inspiration for the swashplate, check out my deep-dive into Ingenuity: https://hackaday.com/2020/09/02/an-up-close-look-at-the-first-martian-helicopter/