 Giovanni
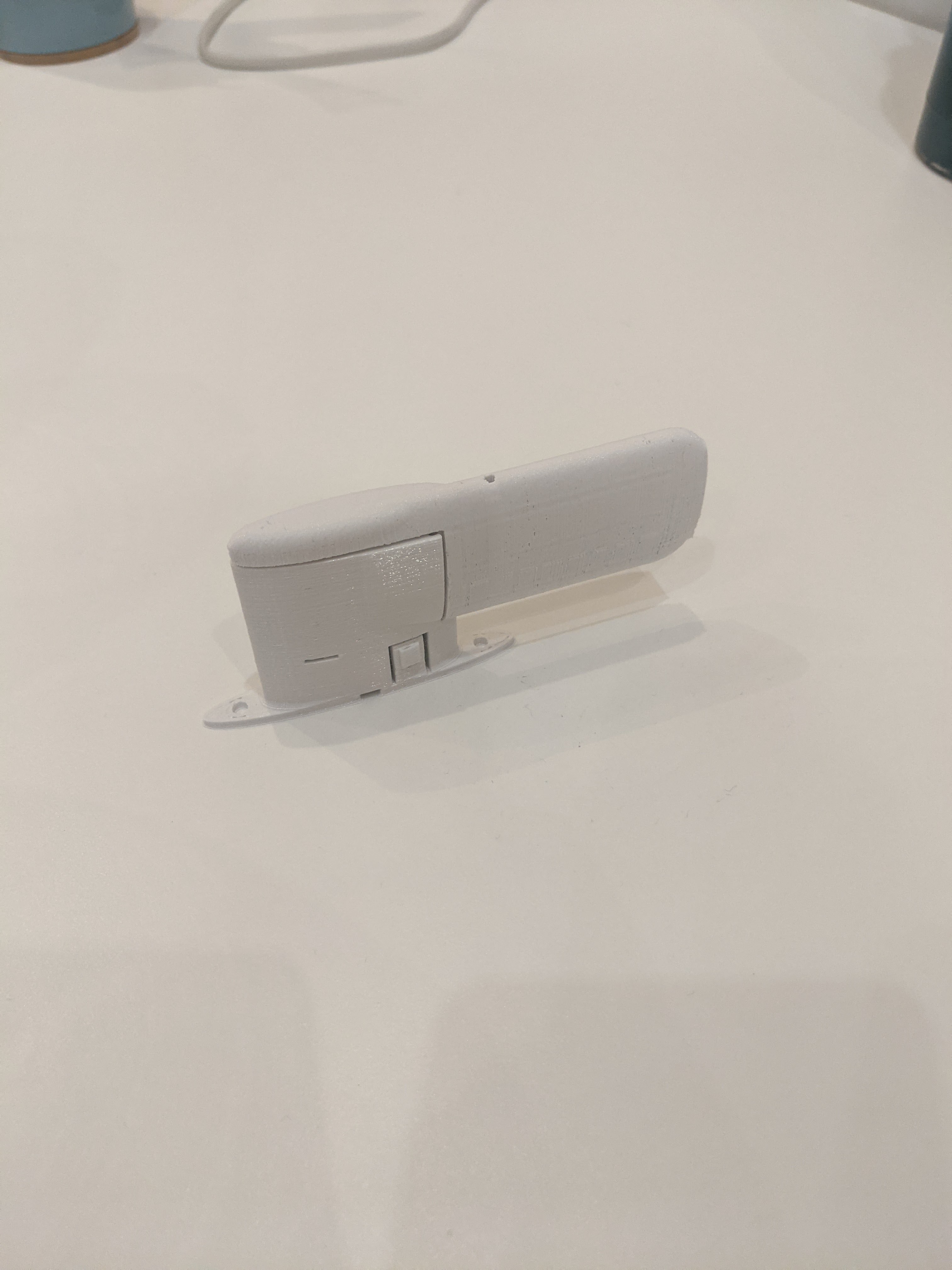
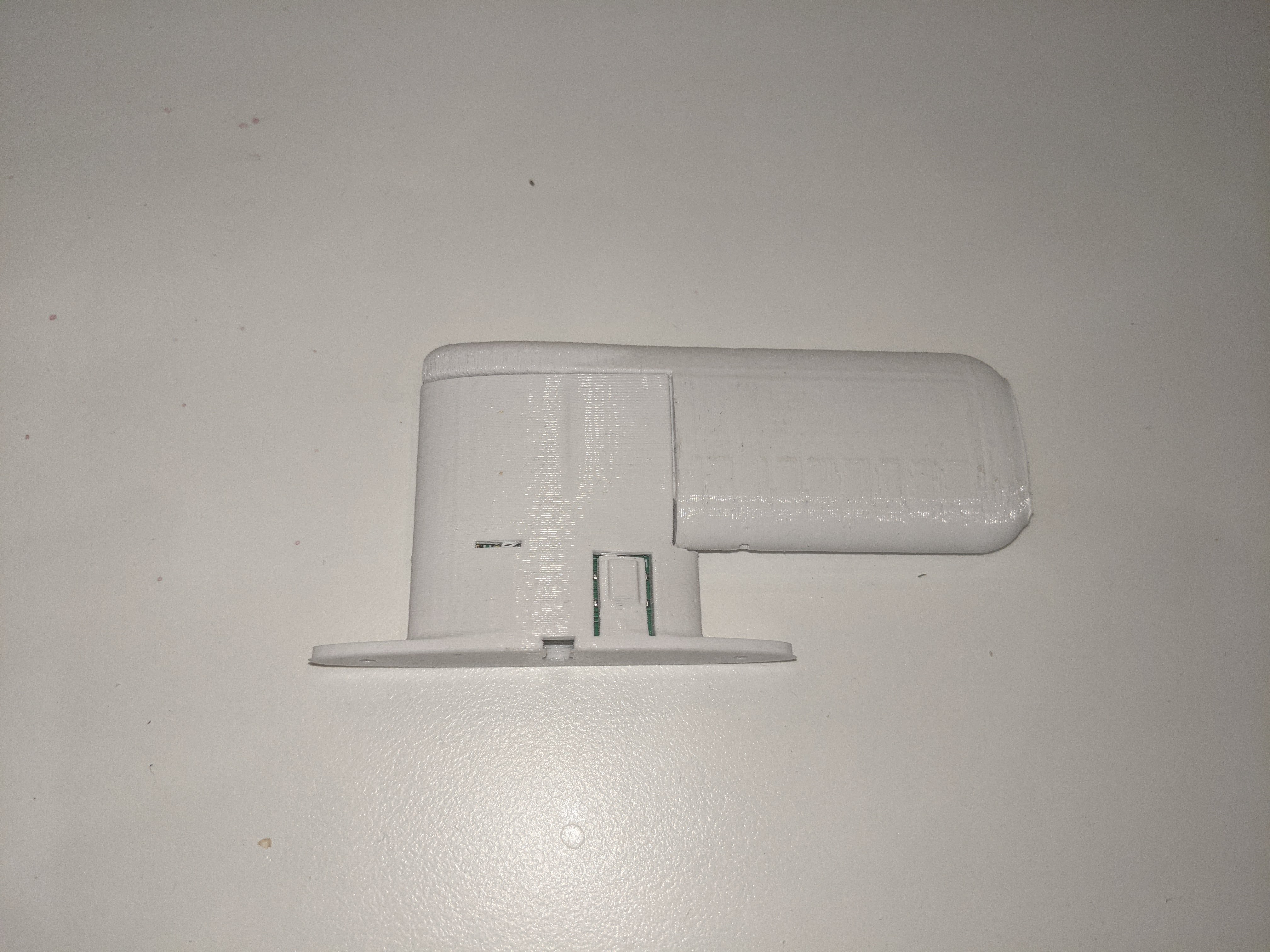
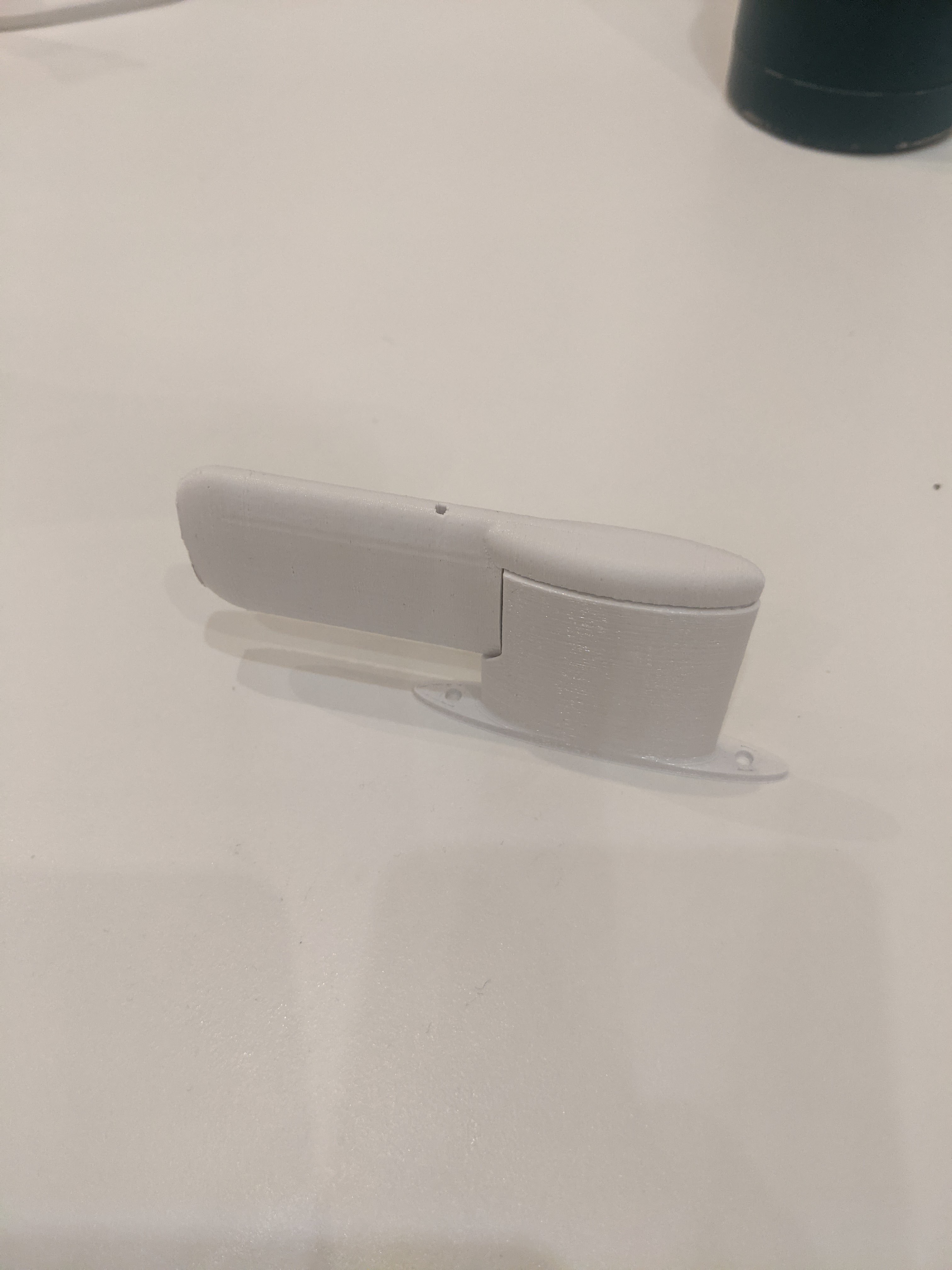
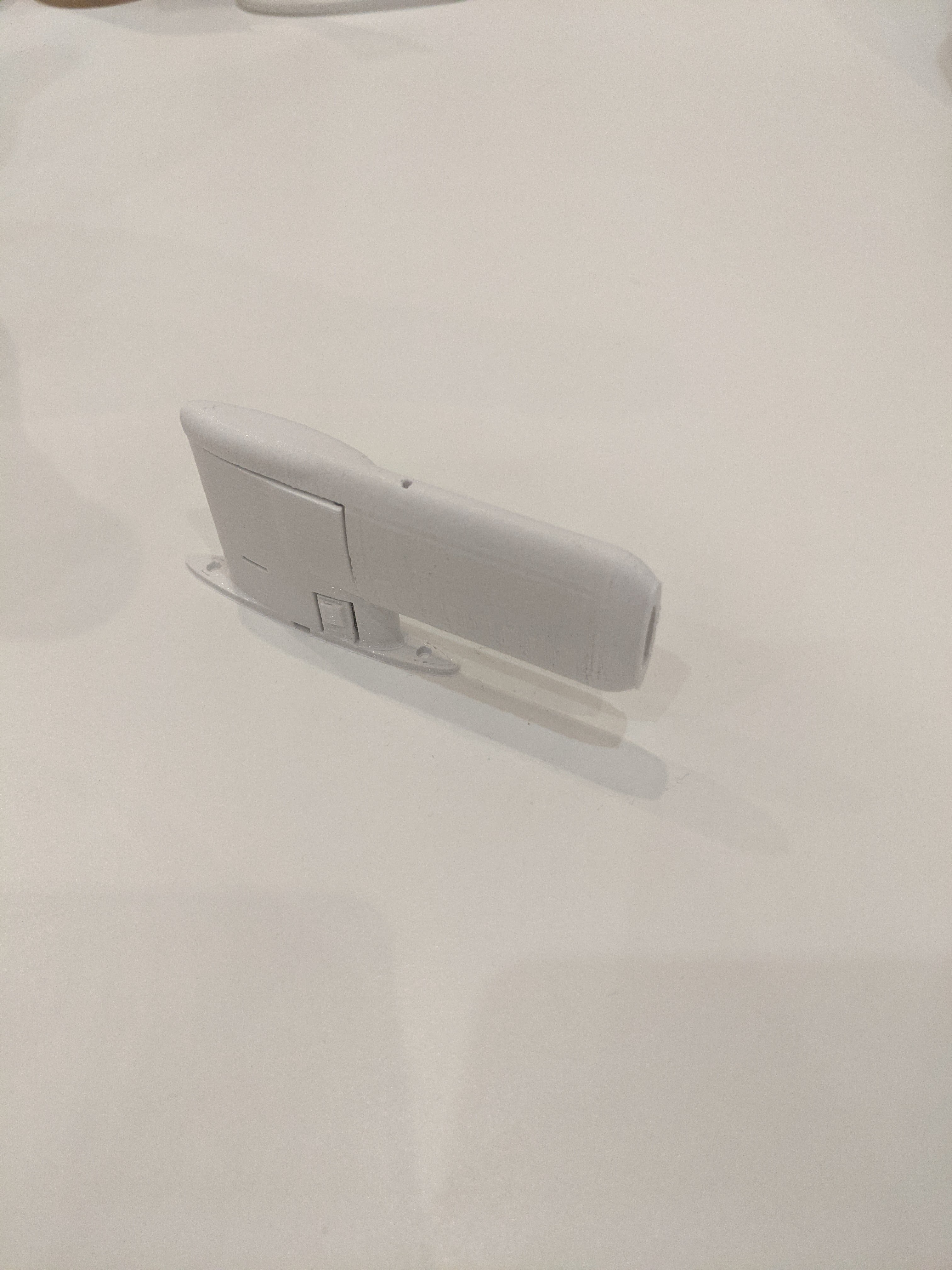
GiovanniI designed and 3D printed the case and mount for the PCB. (it should be a 2h print.
I attached the files for it.
I also tested the sensor while driving around for an hour (I was on the passenger seat ;) ):
- barometer drift was never over 10km/h (at low speeds, but it gets much more accurate as speed increases)
- both altidude and speed were sent reliably to INAV via MSP
Next step it is flying it, but this one will take a while unfortunately (I am waiting for a few pieces to get my plane back in order)

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.