 Joey Shyu
Joey ShyuAfter assembling the car, it is now ready for testing. The goal of the test is to calibrate the car for it to stay on this ring track.

On the initial run, the car may struggle to stay on track. This is due to the brightness of the environment causing the photoresistors to receive inconsistent values, further making the motors function at the wrong time.
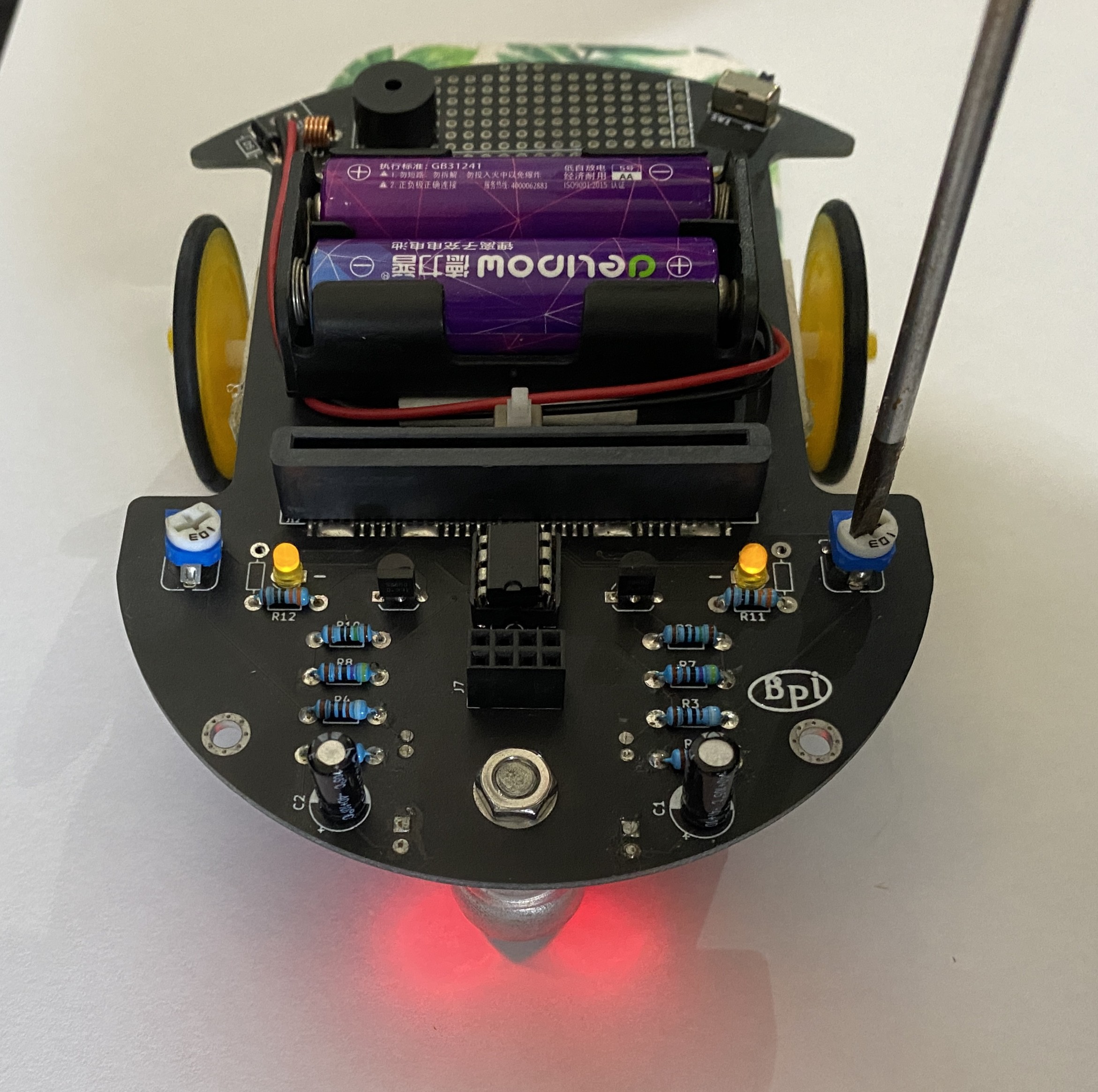
To fix this, I placed the car on a blank piece of paper and adjusted both potentiometers manually. Once it reaches the point where the two motor indicators seemingly light up simultaneously, this shows the car has been calibrated for the current environment.
test run number two, results show the chances of it running off course have reduced drastically, although it's still wobbling.
The theory of the line-tracking feature is fairly simple. The car is equipped with an LM393 microchip controller to control the motors. The photoresistors act like a switch, when the resistor hovers above the dark line, its resistance value changes due to dark surfaces reflecting less light, and it is that change that helps the microchip determine whether it is on track or not.
Therefore, in the standard mode, the microchip can only drive one motor at a time, making it wobble on the track. The wobbling issue can be solved later when we get to learn to implement a software fix.
The car is now relatively stable, but there is still a small chance of it running off course. This is due to the hardware limitations of the photoresistor, although it seemed to instantly react to the brightness change, it actually has a 20ms reaction time. Think of it as it updates the resistance every 20ms. What impact does this have? Well, the car may fail to react during the slight interval, causing it to run off course, although it is very unlikely. I'll try to bypass this using a software fix later on when we get to control it using the micro: bit.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.