 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠The QuadROSbot is now autonomous!
The image below shows the original waypoints in red and the actual path taken in blue. The throttle was controlled manually, but the steering was automatic and, as can be seen, the robot followed the way-points fairly well:
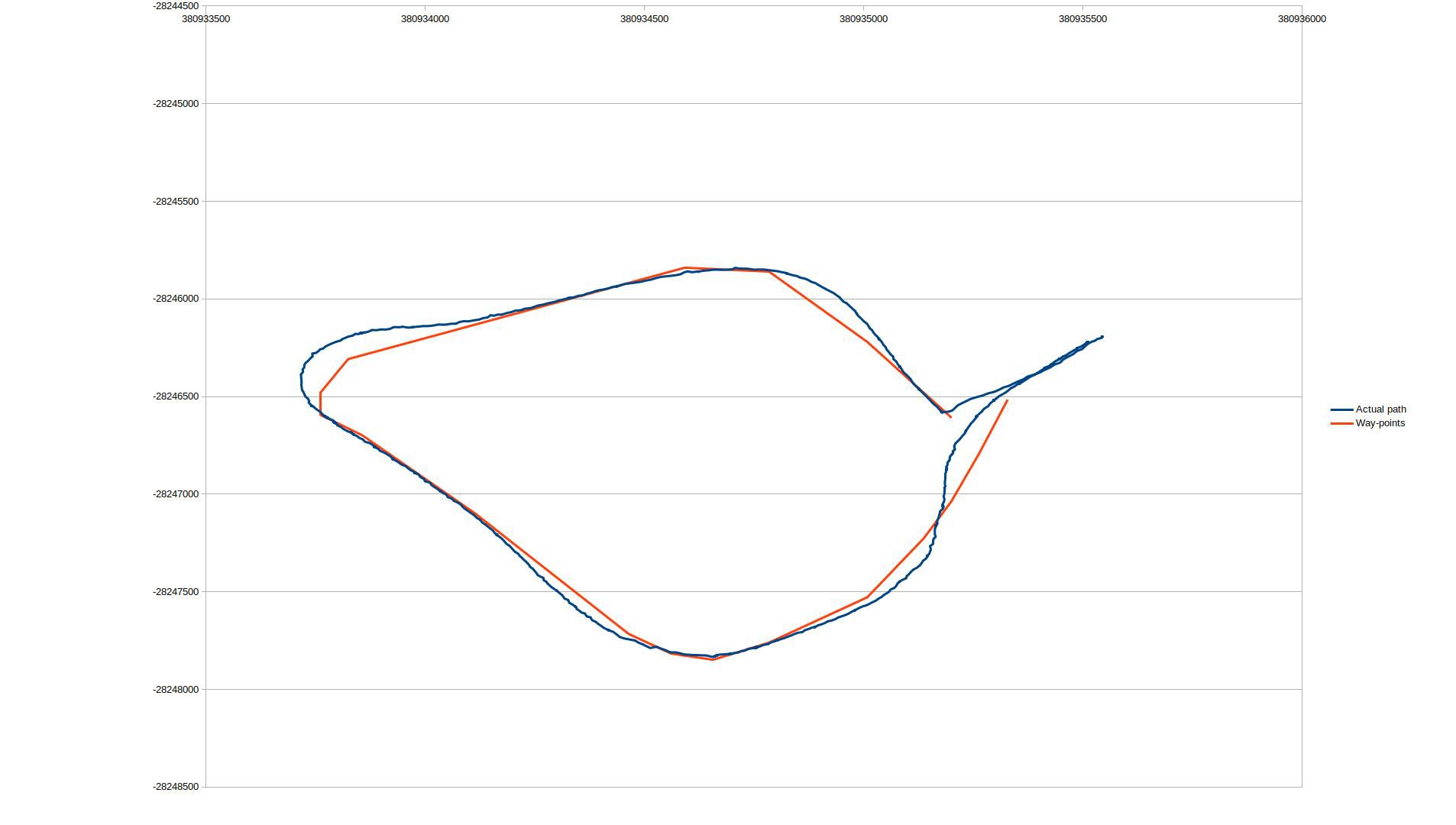
There's a noticeable over-shoot in the top left corner which can hopefully be corrected with a bit of fine tuning.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.