 selena1995
selena1995Before starting let’s see first What you will learn from this instructable:
· Making the right hardware selection for your project depending on its functionalities.
· Prepare the circuit diagram to connect all the chosen components.
· Assemble all the project parts (mechanical and electronic assembly).
· Finally designing your own ARDUINO-based Light Tracking Robot.
Mechanical Part
Our first step will be to make the robot body. so, here we have to make a DIY chassis and assemble TT gear Motor with the robot chassis.
Electronics Part
Now we are going to assemble all the components with the PCB. I have made a PCB file to make it easy to assemble and ordered my PCB from JLCPCB. They are very professional in PCB making and the build time was short. I received my item within 7 working days.
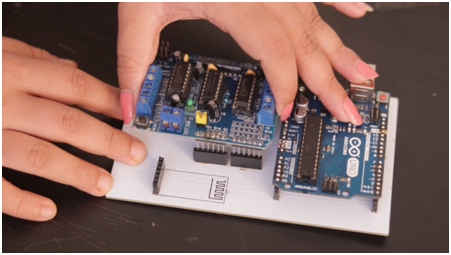
After getting the PCB it was just a less than 2 minutes job to assemble all the components in a proper way.
Arduino Coding
Now I had to upload the code to the Arduino UNO.So I have attached the USB cable that comes with the Arduino UNO board and follows the steps mentioned below
· Open Arduino IDE on your PC
· Connect ARDUINO with PC via USB Cable
· Go to Tools > manage libraries > Search for AF Motor driver and download
· Go to Tools > Board > and select Arduino\Genuino UNO
· Go to Tools > Port > Select proper COM port
· Now Verify the code and then upload it
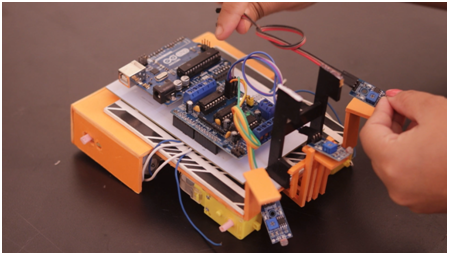
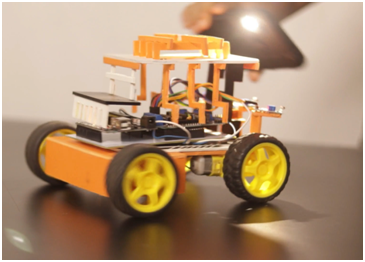
Assemble all parts together
Here in this part, I am going to assemble all the parts like wheels, chassis encloser together and insert the 18650 li-ion battery on the battery holder.
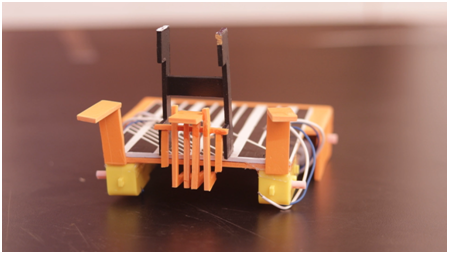
And here is how it finally looks like…

Now the robot is ready to go…

About JLCPCB
JLCPCB (Shenzhen JIALICHUANG Electronic Technology Development Co., Ltd.), is the largest PCB prototype enterprise in China and a high-tech manufacturer specializing
in quick PCB prototype and small-batch PCB production. With over 10 years of experience in PCB manufacturing, JLCPCB has more than 200, 000 customers at home and abroad,
with over 8, 000 online orders of PCB prototyping and small quantity PCB production per day. The annual production capacity is 200, 000 sq.m. for various of 1-layer,
2-layer or multi-layer PCBs. JLCPCB is a professional PCB manufacturer featured of large scale, well equipment, strict management, and superior quality.

 M TECH IDEAS
M TECH IDEAS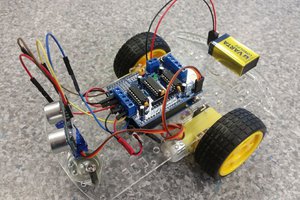
 Romeo hackster
Romeo hackster
 ElectronicABC
ElectronicABC