 Yann Guidon / YGDES
Yann Guidon / YGDESI uploaded the RD-1000 Service Manual and noticed a detail in the first pages. There are 2 types of contacts.
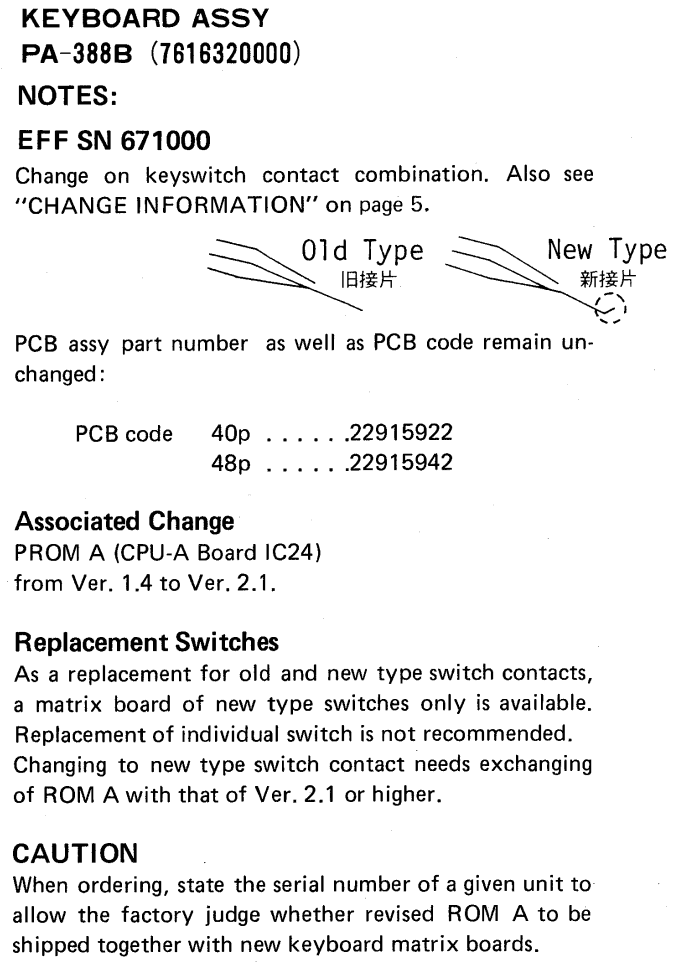
I have not opened the HEAVY case (44kg) so I don't know which kind is installed. However the manual helped me estimate/evaluate/anticipate the design of the position sensor. For example, it is clearly mentioned that one PCB has 40 contacts and another has 48, with a total of 88 contacts (everything adds up nicely).
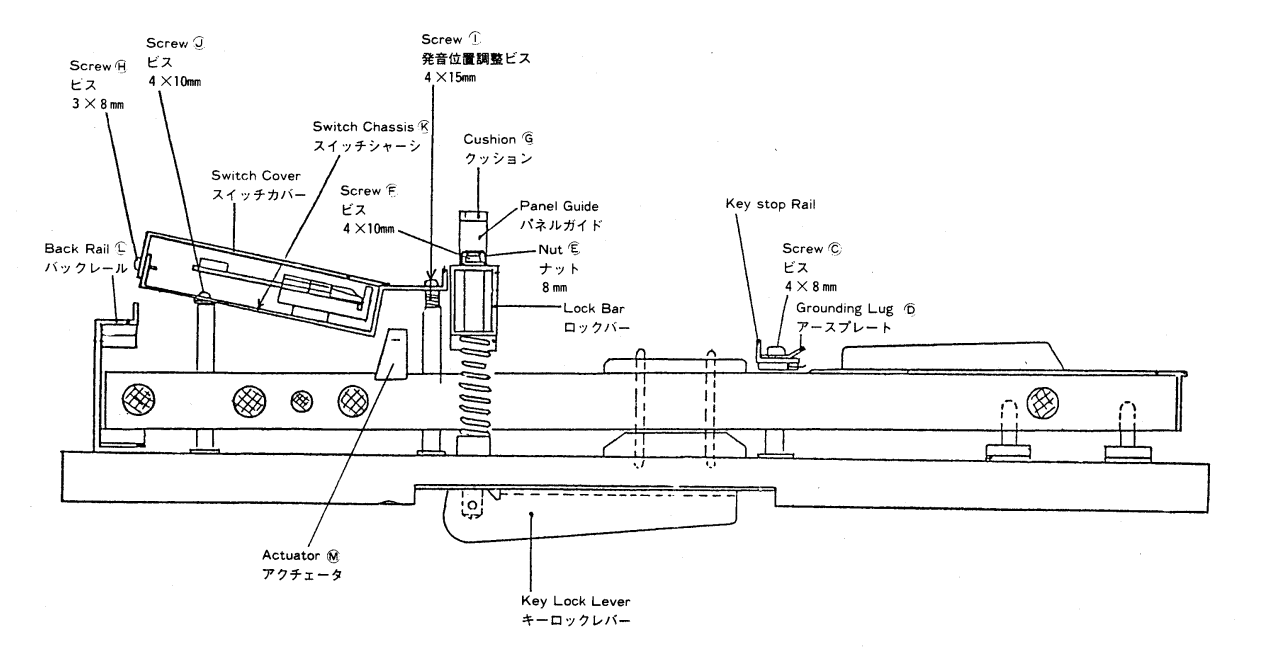
The mechanical system is both heavy and easy to hack : screws everywhere, enough space to include my own stuff...
But I still don't know what sensor I'll use.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.