CZŁONKOWIE ZESPOŁU
LIDER ZESPOŁU: Kacper Fila
LIDER SEGMENTU MECHANICZNEGO: Artur Bylica
LIDER SEGMENTU ELEKTRONICZNEGO: Łukasz Bacior
LIDER SEGMENTU PROGRAMISTYCZNEGO: Jakub Banaś
Eryk Czop, Jan Fidor, Jakub Kawałek, Jan Drzyzga, Tomasz Rogala, Szymon Cisowski, Michał Bizoń, Hubert Gajewski
CELE PROJEKTU
1.1 CEL GŁÓWNY (KAMIEŃ MILOWY)
Zaprojektowanie automatycznego ramienia podającego cukierki z miejsca A do miejsca B. Użycie odpowiednich sensorów wskazujących na to, czy ramię podniosło cukierka czy nie.
1.2 CELE POBOCZNE
Zaprojektowanie automatycznego ramienia podającego cukierki z dowolnego miejsca do dowolnego miejsca.
MATERIAŁY
Przy projektowaniu wyżej wymienionego robota zostaną użyte następujące materiały i oprogramowanie:
- Autodesk Fusion 360, do segmentu mechanicznego, czyli stworzenia ramienia w wersji “fizycznej” w programie przy użyciu plików .stp zawierających klocki LEGO.
- Arduino, do segmentu elektroniczno - programistycznego, które odpowiedzialne będzie za odpowiednie sterowanie oraz ruch ramienia.
- Fritzing, do wykonania schematów budowy instalacji elektronicznej (https://fritzing.org).
- Cukierki o regularnym kształcie.
ORGANIZACJA PRACY
Przed rozpoczęciem pracy nad projektem został dokonany podział 12 członków grupy projektowej na 3 podgrupy zajmujące się odpowiednimi segmentami: mechanicznym, elektronicznym oraz programistycznym. Zostali wybrani liderzy grup - zarówno całej grupy jak i każdego segmentu z osobna.

 Jose Pedro R. A. Ribeiro
Jose Pedro R. A. Ribeiro
 Tea B
Tea B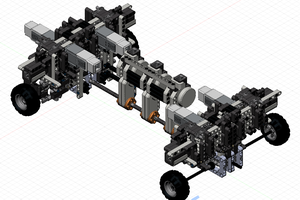
 Bartosz Starzyk
Bartosz Starzyk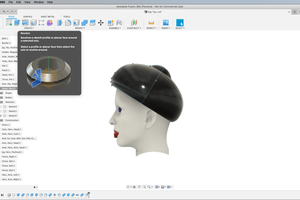
 Greg Zumwalt
Greg Zumwalt
Guys, please use English language if you're posting your project on an international website.