 Adrian Prinz
Adrian PrinzAll the mechanical components for the first 3 axis are build/ machined using my diy CNC mill and a bechtop lathe
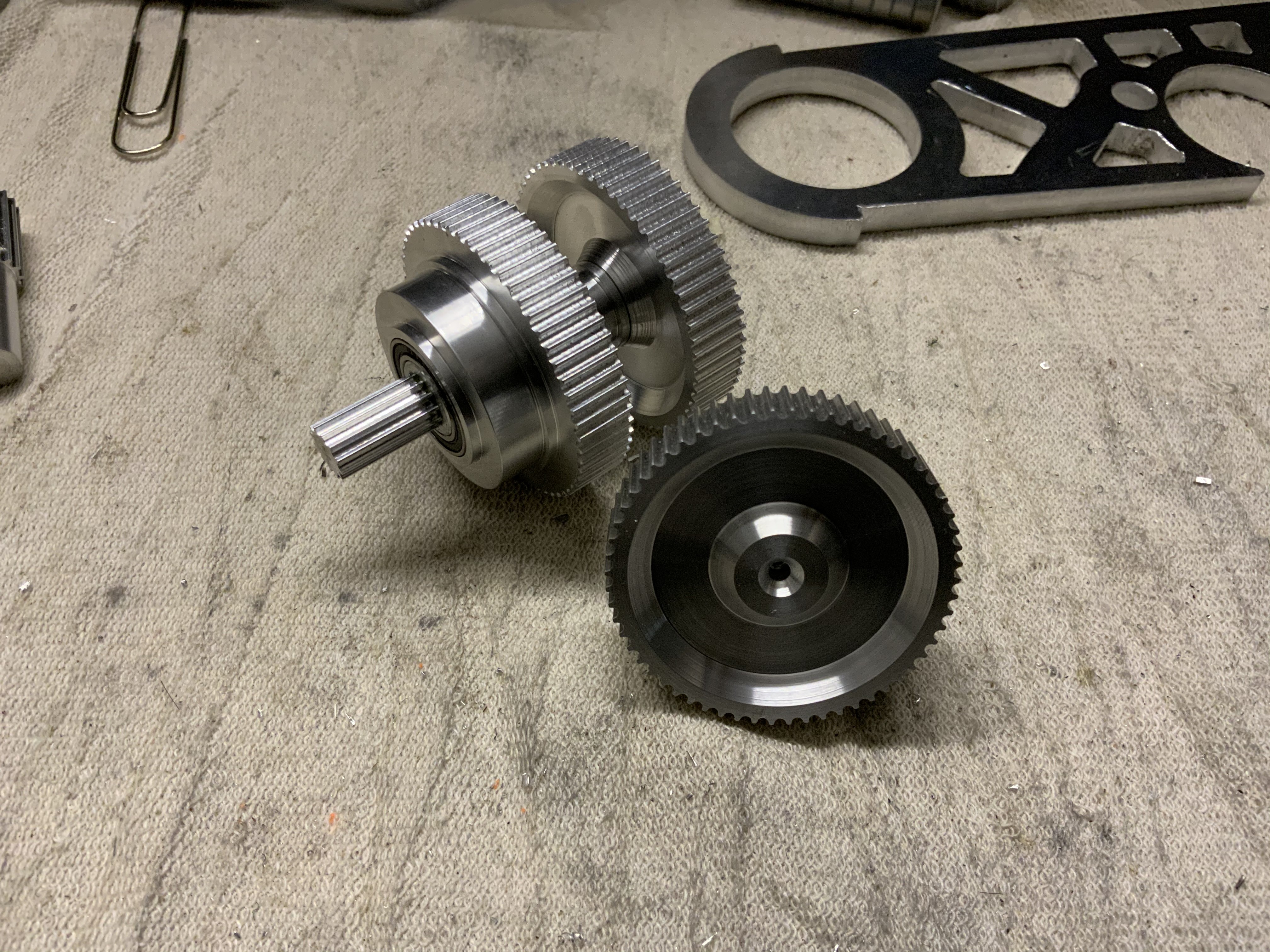
The following pictures show a few examples of the components that I machined:

Belt pulleys:
A project log for Dynamic 6-Axis Robot from scratch
I developed a 6 axis robot with half a meter reach and 3kg payload. It is servo driven and features absolut encoders on all axis.
All the mechanical components for the first 3 axis are build/ machined using my diy CNC mill and a bechtop lathe
The following pictures show a few examples of the components that I machined:

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.