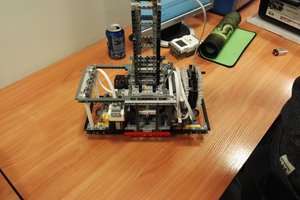
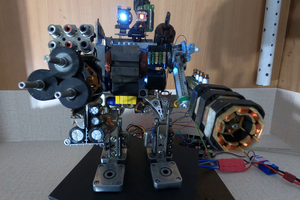
Celem projektu było wykonanie mobilnego robota utrzymującego stałą, uprzednio zadana odległość od ściany. Cała konstrukcja składa się z trzech części odpowiedzialnych za starowanie, napęd oraz zasilanie, co sprawia że jest to w pełni działający robot.
Taki efekt mógł zostać uzyskany, dzięki zastosowaniu sensorów ultradźwiękowych oraz przycisków działających jak krańcówki. Robot dzięki gąsienicom i ruchomemu zawieszeniu jest w stanie pokonać trudniejszy teren niż tylko plaska powierzchnia podłogi.
Dzięki zaimplementowaniu odpowiednich algorytmów, robot nie tylko utrzymuje stałą odległość od ściany, ale również pokonuje zakręty oraz omija napotkane na drodze przeszkody, co czyni go bardziej funkcjonalnym.
W realizacji projektu brali udział studenci kierunku Inżynieria Mechatroniczna z wydziały Inżynierii Mechanicznej i Robotyki AGH
- Cykowski Piotr
- Fitner Paweł
- Kopeć Maciej
- Kras Natalia
- Kubik Michał
- Leszczyk Wiktor
- Mayer Mateusz
- Mróz Jakub
- Murek Mikołaj
- Ormaniec Adrian
- Potocka Natalia
Projekt został wykonany w ramach kursu Podstawy Mechatroniki, odbywającego się na wydziale IMiR Akademii Górniczo-Hutniczej im. Stanisława Staszica w Krakowie.

 tinandjar
tinandjar
 Mi1es
Mi1es