 3drobert
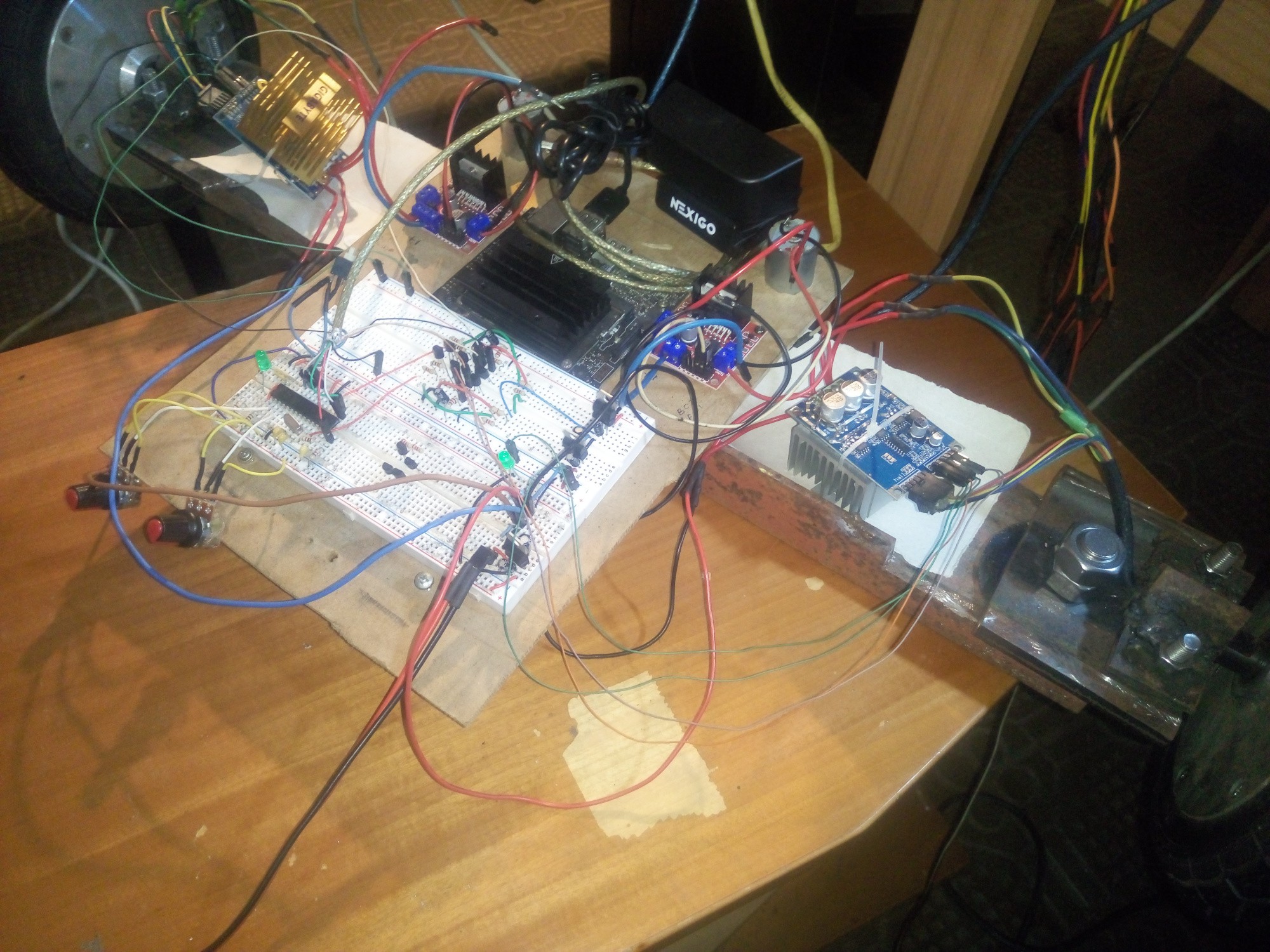
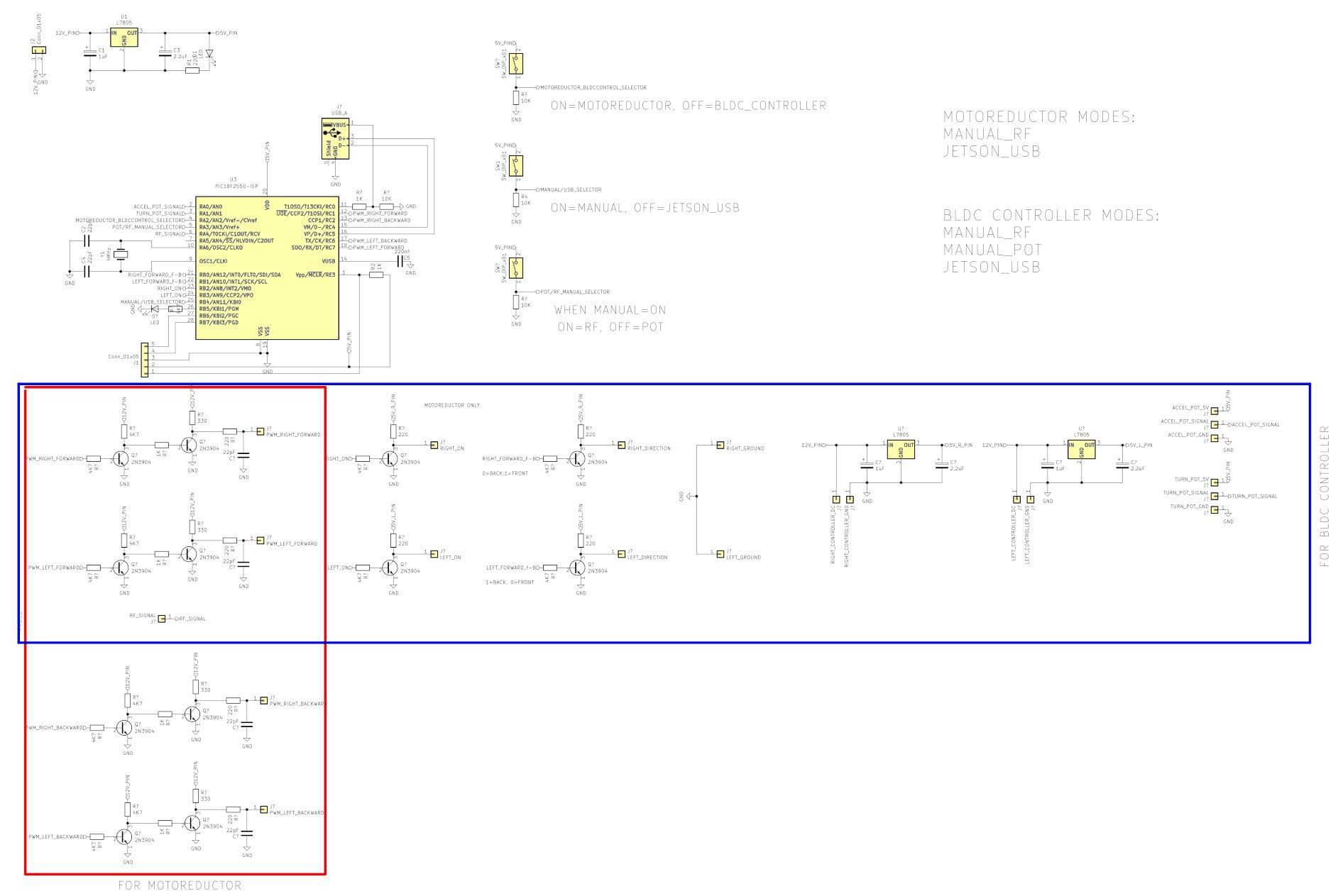
3drobertMaking two modes for TCPUSB class controller.
Using BLDC controller for big vehicle (manual control, RF or Jetson_USB)
or using geared motors for little vehicle (RF or Jetson_USB)
A project log for NSCE-ngbrain
scalable hardware for neural network system
Making two modes for TCPUSB class controller.
Using BLDC controller for big vehicle (manual control, RF or Jetson_USB)
or using geared motors for little vehicle (RF or Jetson_USB)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.