 deʃhipu
deʃhipuThe previous two versions of this projects were kinda done on the side of #Kubik M0 to see if this approach even makes any sense. I finally decided to go for it, so here is a version three, with a new PCB:
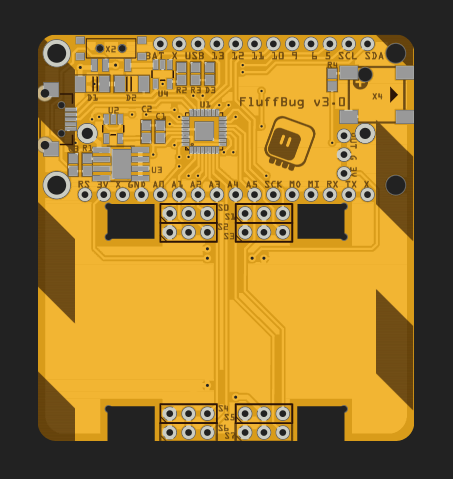
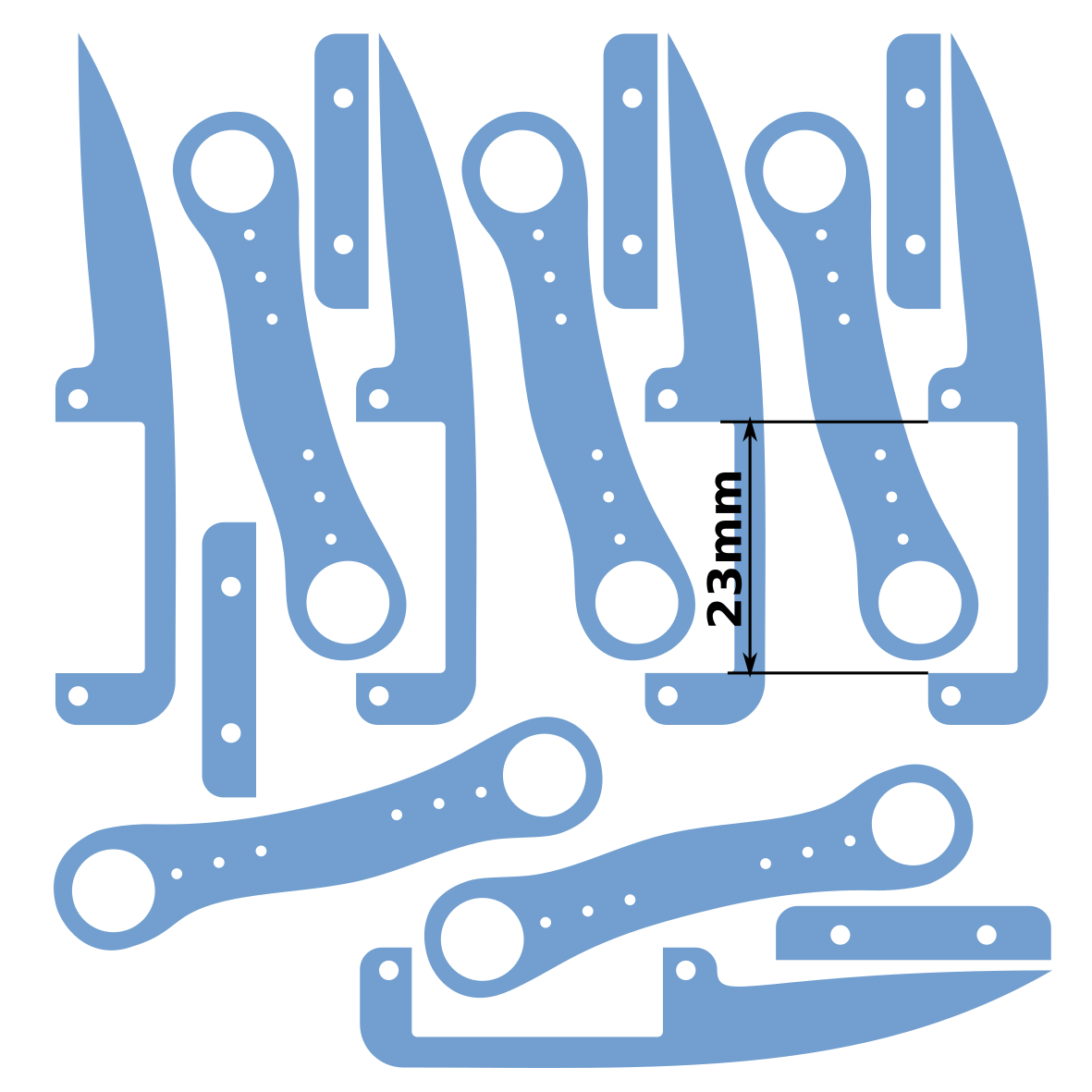
and an improved design of the legs (to make them use less acrylic, so you can fit more of them on a sheet):
The PCB now includes, apart from the previous microcontroller, battery protection, battery charging and battery holder, also a tiny buzzer and a place to install an IR sensor — this way I can report the status of the robot with beeps, and control it with a TV remote.
Any further sensors and other hardware can be added as FeatherWing shields to the front of the robot.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.