 Dejan
DejanPatients typically do not have the strength to build such DIY telepresence robots themselves. Botkins Charity Project tries to create an access to robots, but relies on donations and makers. Material costs per robot are around 400€, assembly work around 2-5h, the robots are given to chronic patients for free.
The association does not pursue commercial purposes and does not strive for profit. Botkins would like to thank the non-profit project Vigibot ( https://www.robot-maker.com/forum/topic/13010-what-is-vigibot-quest-ce-que-vigibot/ ), whose open-source instructions, documentation, 3D files, modified partlist and software Botkins uses.
Besides helping the mentioned patients, another purpose of the project is to make the general public aware of the situation of people suffering from Myalgic Encephalomyelitis (ME). Botkins receives valuable help and information from the Swiss Society for ME and CFS (Schweizerische Gesellschaft für ME und CFS, https://sgme.ch ), as well as assistance in selecting suitable patients.
Donation details:
IBAN: CH81 8080 8009 8363 5484 4 (No transaction fees)
Recipient: Botkins Charity Project, 3752 Wimmis, CH - Switzerland, SWIFT-BIC: RAIFCH22
Paypal: https://paypal.me/BotkinsCharity
Twint / RaiseNow: https://pay.raisenow.io/vxxbd (Anonymous donations only. For cost share payments please use another payment method.)
Contact details:
Contact us on hackaday, social media @BotkinsCharity or per E-Mail ( listed on https://botkins.ch )
To reach our goal, Botkins needs help, and is looking for:
• Donations of any amount to pay for materials and compensate tinkerers. see donation details.
• Hobbyists who would like to build a robot for a patient. Botkins covers the costs. send us your contact details, country and whether you have access to a 3D printer.
• Homebound or bedridden patients interested in a robot. Fill out the form on https://sgme.ch/botkins/ .
• Workshop leaders. we don't yet know how workshops will work.
• If you think Botkins is a good effort. Tell people about Botkins or create a post on social media and tag @BotkinsCharity . You may also share video clips from the robots CakeOnIce and Pancake: see test drive.
See a robot in action in a swiss national TV "SRF Reporter" segment about ME (English subtitles available) from the 30. of March 2022 starting at timeindex 17:40.
Test drive a robot, quick driving instructions:
Interested people can try Vigibot's internet-control themselves to see if their smartphone or PC can handle the control software or just for fun.
«CakeOnIce» and «Pancake» are usually online during the day (GMT+1) on https://vigibot.com , on mobile drag the center dot ⦿ like a joystick, on the PC use W A S D to drive, Q E for sideways (pancake), shift for full speed. Switch between camera and gripper with the "skip/previous" buttons. Drag the viewscreen to move the camera / gripper and click the stop ■ button to reset camera orientation.
Use a Chrome-based browser such as Chrome or Brave. The software is very challenging for smartphones, if it has red bars, something's not working. If driving doesn't work due to missing permissions, ask in the Vigibot Chat or Vigibot Discord for permissions. The driving behavior is similar to remote controlled model vehicles or RC cars, but with additional real-time video transmission (FPV).
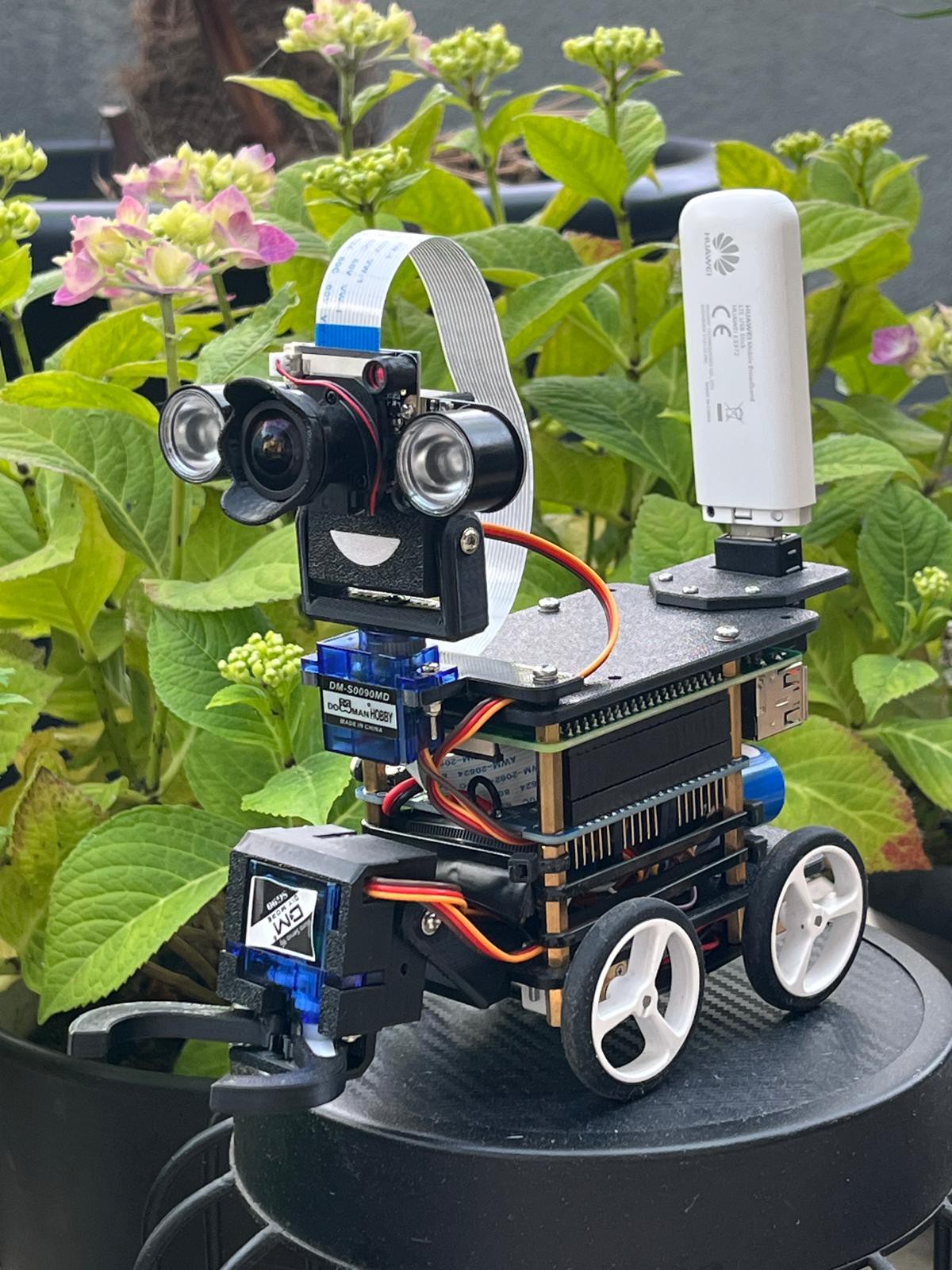
Hardware: Inside is a Raspberry Pi 3, 3B+ or 4B SBC, connected to the internet through the mobile data USB stick. A SIM card is not included, a mobile data subscription must be purchase by the patient, these are usually in the range of 5.- to 20.- CHF / $ per month depending on ISP (as of 2022), for estimated 5 GB - 10 GB per month with an upload speed of at least 50 Mbit/s. The Robot has a pan & tilt mechanism with camera, 2x LED spotlights,...
Read more »



 Doan Hong Trung
Doan Hong Trung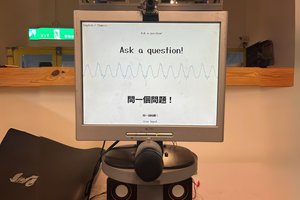
 Swaleh Owais
Swaleh Owais
 sharanago
sharanago
 Pascal Buerger
Pascal Buerger
This is such a cool idea! Have you considered adding a telescoping arm or something that could bring the camera up higher off the ground? With the current wheels it would probably have to be stationary when it's extended, but could provide a more human perspective for the viewer. There's also the option of making it a 2-wheeled balancing robot, which might be able to stay stable with a tall pole holding up the camera.