 Petar Crnjak
Petar Crnjak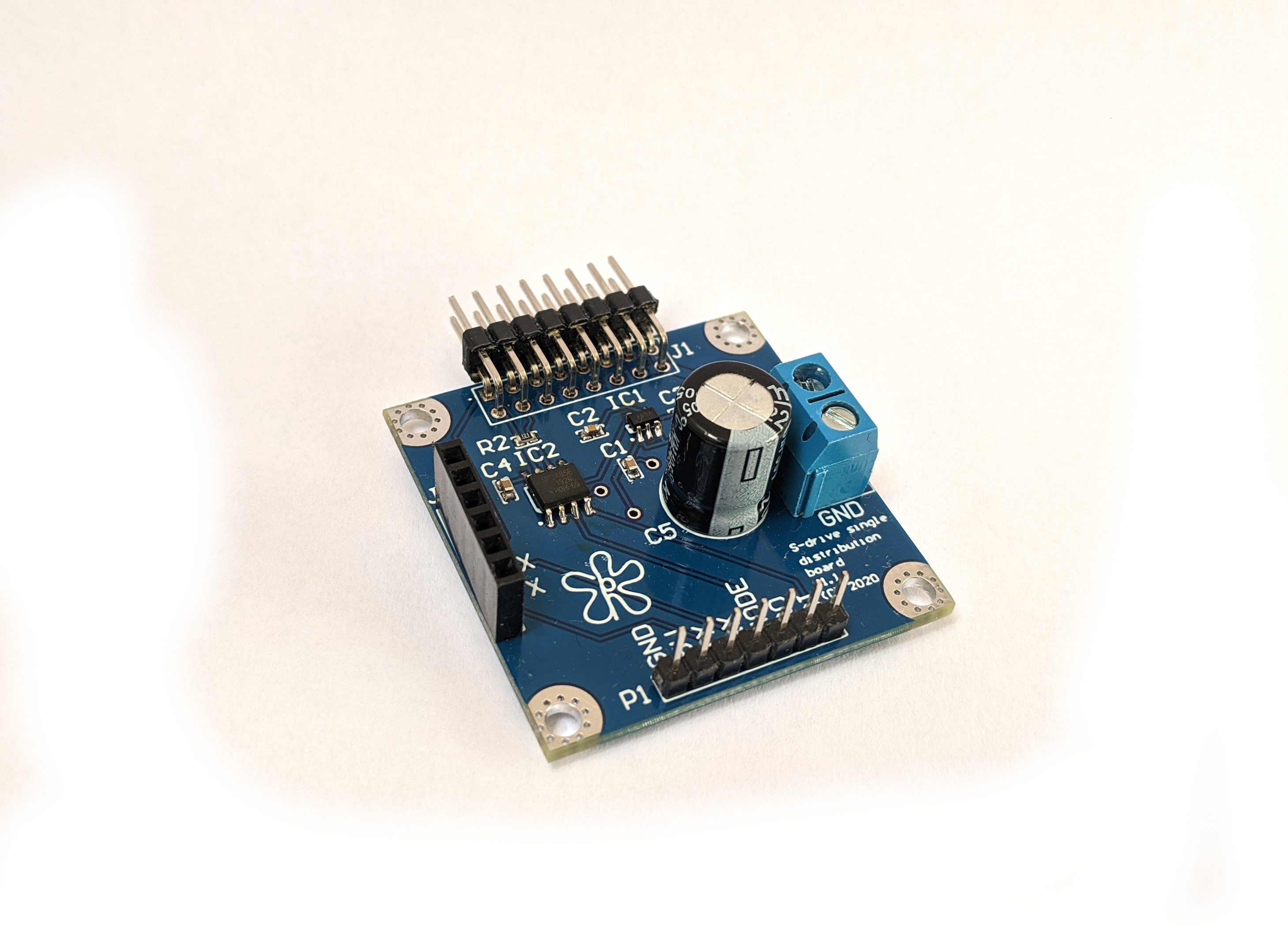
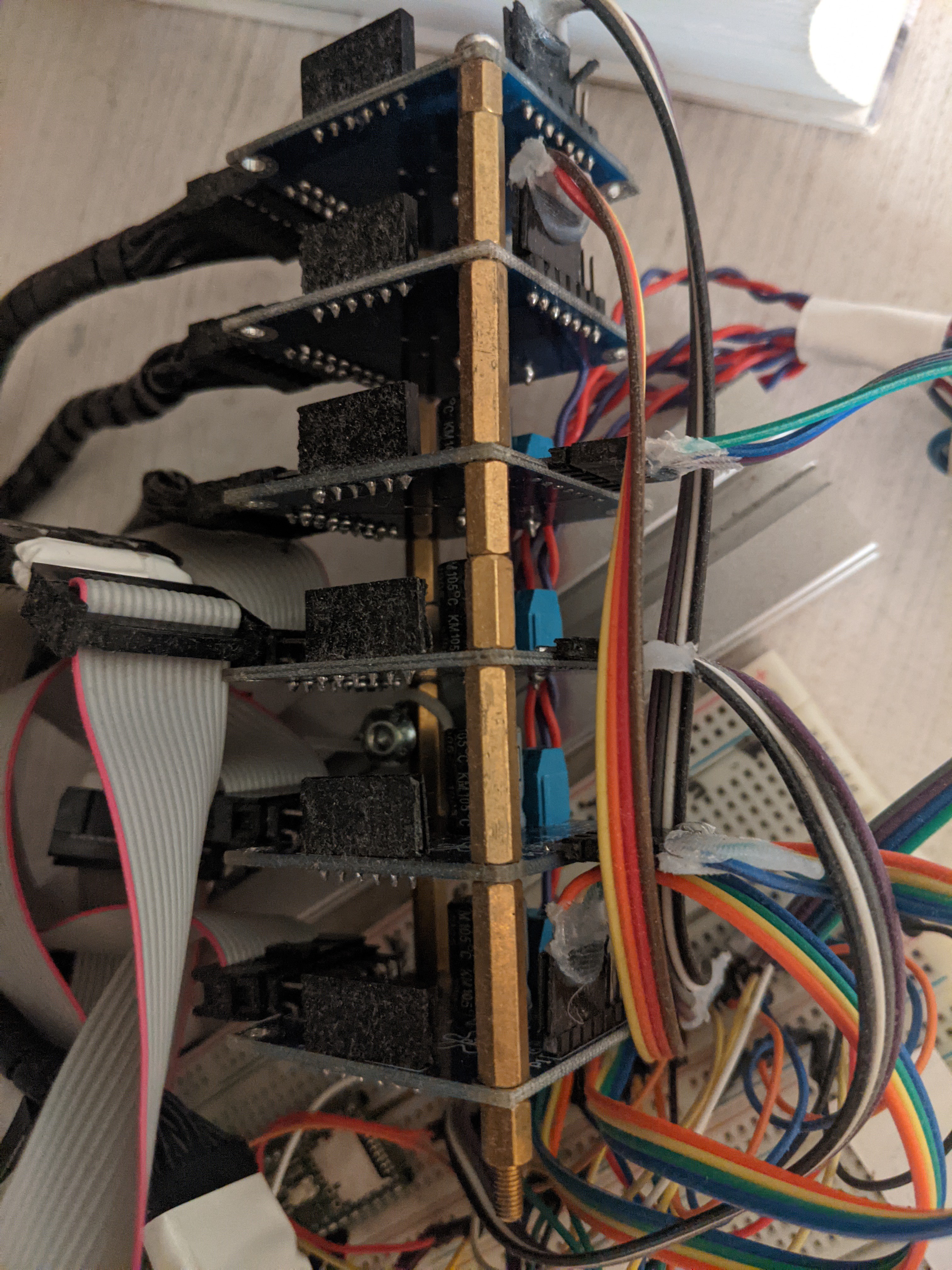
A Connector board is used to connect the S-drive BLDC driver to the 24 power supply and to the teensy microcontroller. They are designed to be stacked one on one with brass spacers.
A project log for CM6 - Compliant 3D printed robotic arm
Cheap, Open-source, safe, and compliant 6 - Axis 3d printed robotic arm based on Quasi direct drive BLDC drives.
A Connector board is used to connect the S-drive BLDC driver to the 24 power supply and to the teensy microcontroller. They are designed to be stacked one on one with brass spacers.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.