 josh collins
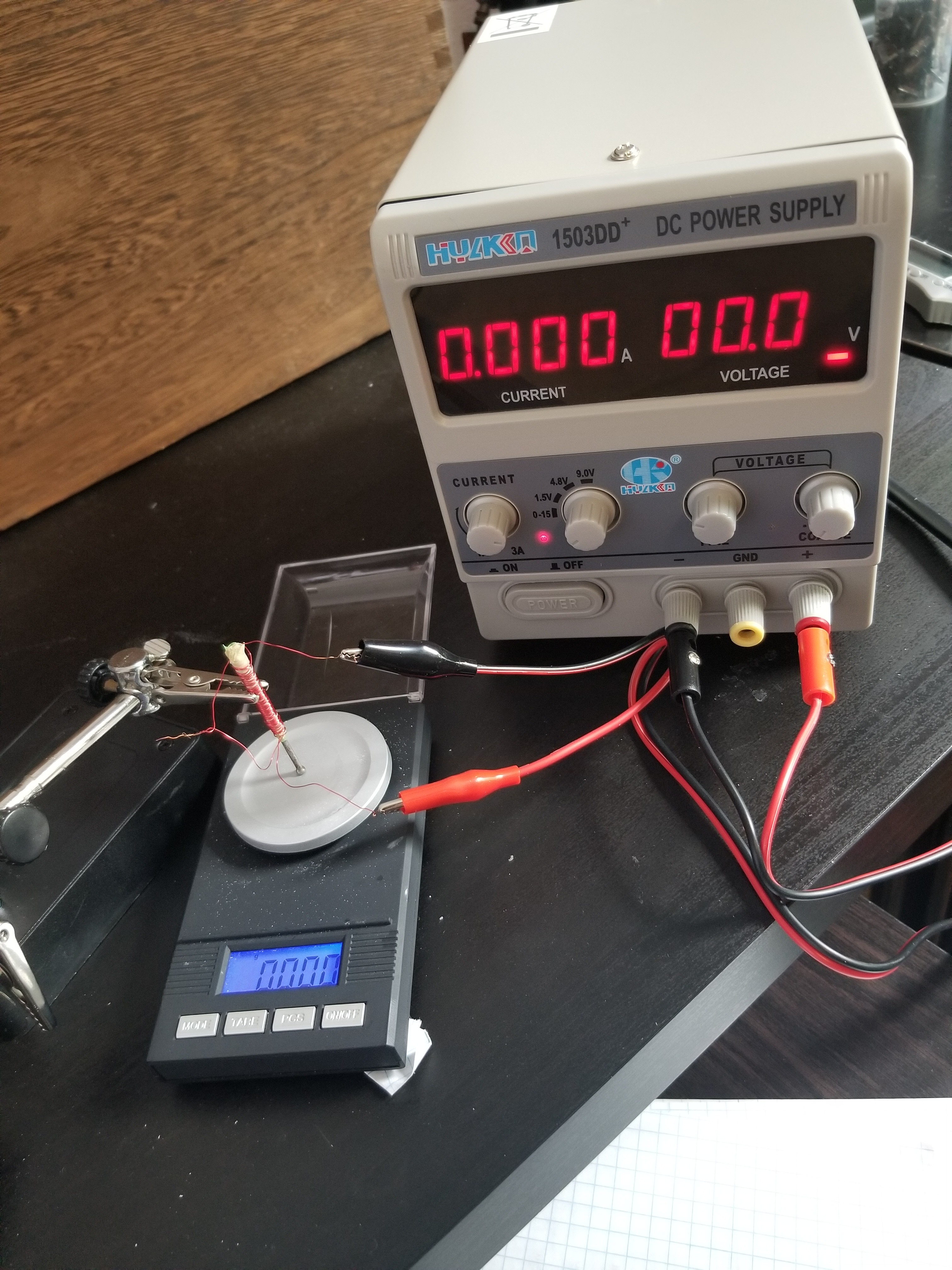
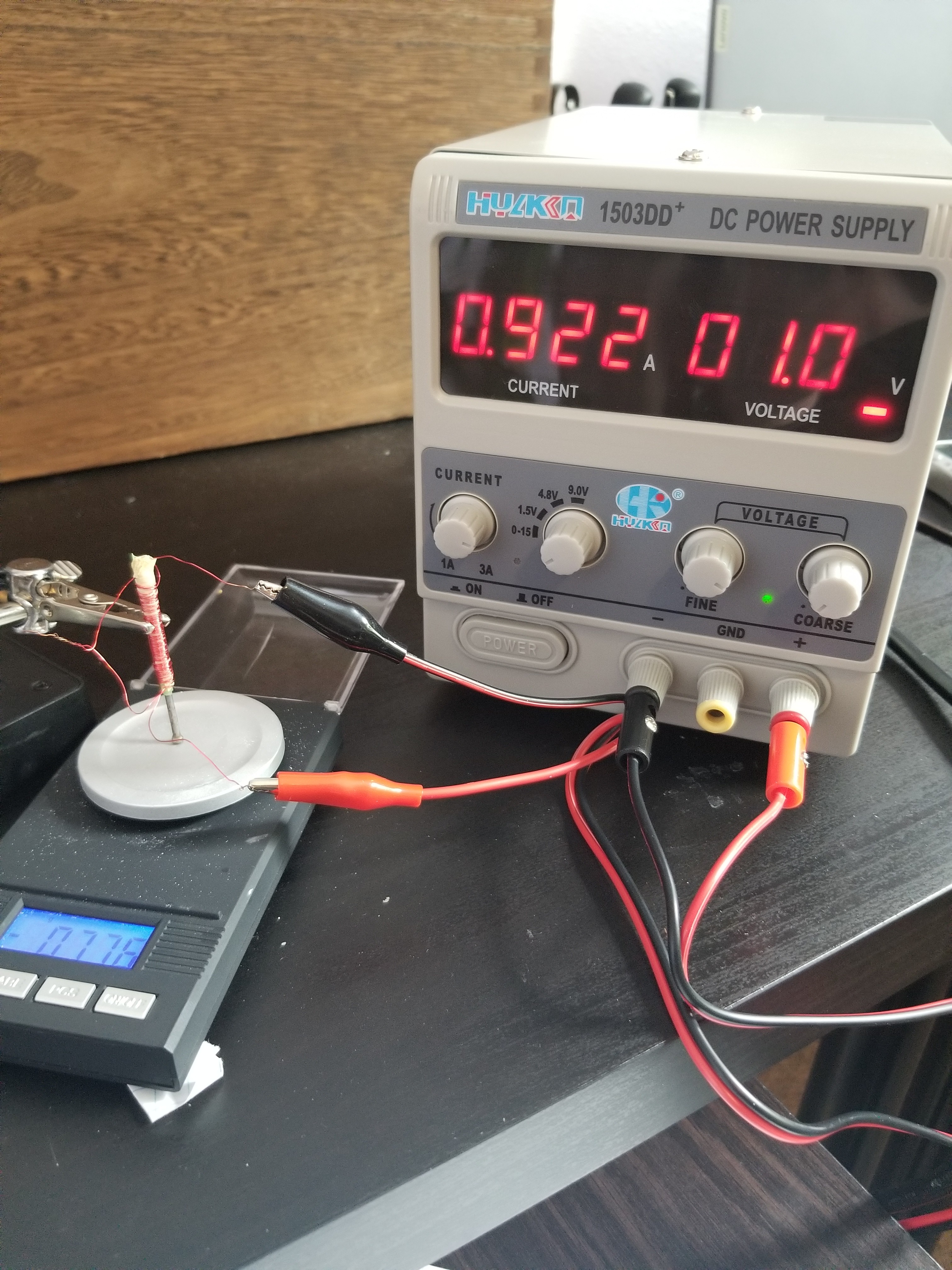
josh collinsThis is just a simple example of a solenoid to use as a reference in order to get an Idea of how to improve the design. For This I just used .16 mm magnet wire, a finishing nail made of high carbon steel (probably), plastic straw, and some tape. At this stage, I can already tell that I can probably improve by using a different number of turns, smaller gauge wire, and a different material for the core. First I will take measurements, and do some calculations in the next log.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.