 ben.phenoptix
ben.phenoptixWe've had some really amazing contributions to the MeArm project and this weekend another one popped up on my twitter feed. A chap called Daniel Bailey put together a guide on running the MeArm with Inverse Kinematics (IK) - where you tell it where to go via coordinates rather than angles to point the servos at.
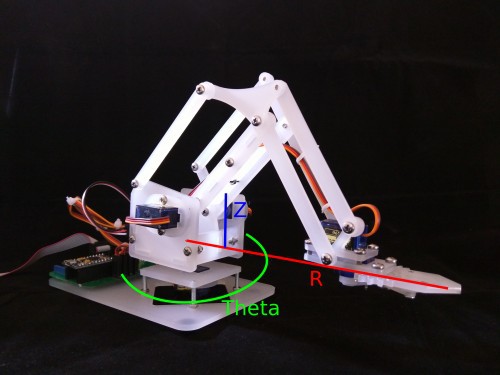
It's a really great guide which covers some concepts that need addressing in the MeArm instructions, like calibration. It also has great photographs:
It's amazing that someone has taken the time to do this work and it really makes the work we're putting in worth while! Many thanks Daniel, now everyone go and check out his site at Bit Of A Hack.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Here is a project that I completed in which the library and article written by Daniel was used extensively.
Are you sure? yes | no