 shane.snipe
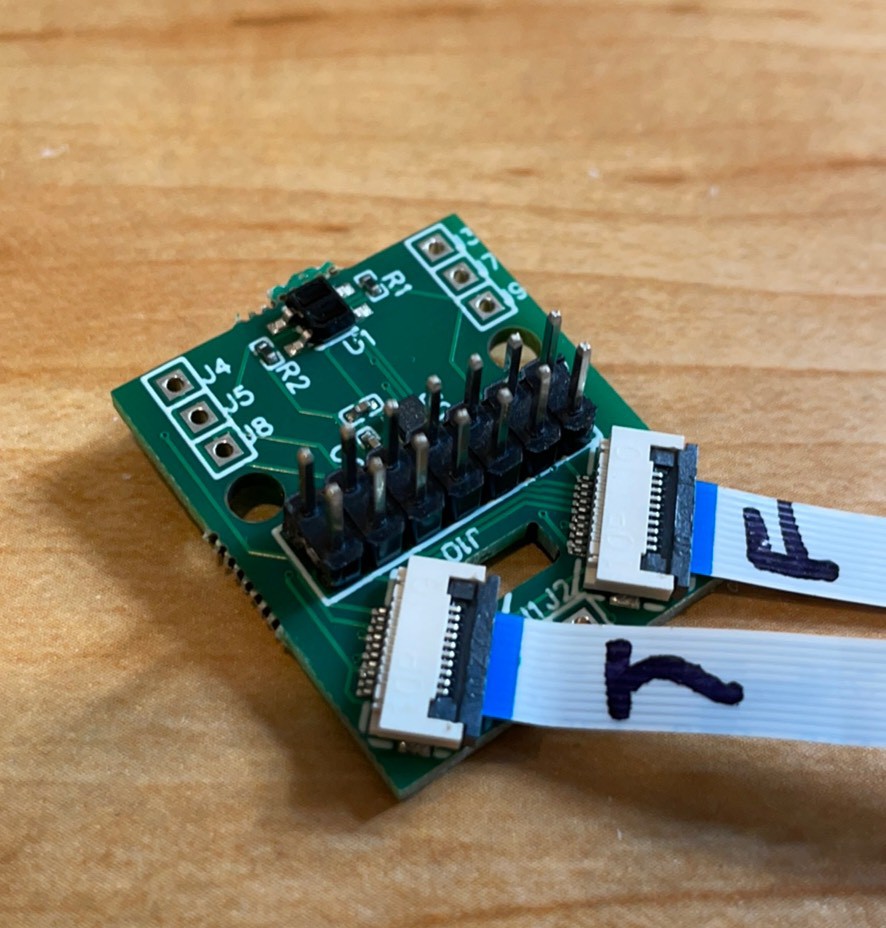
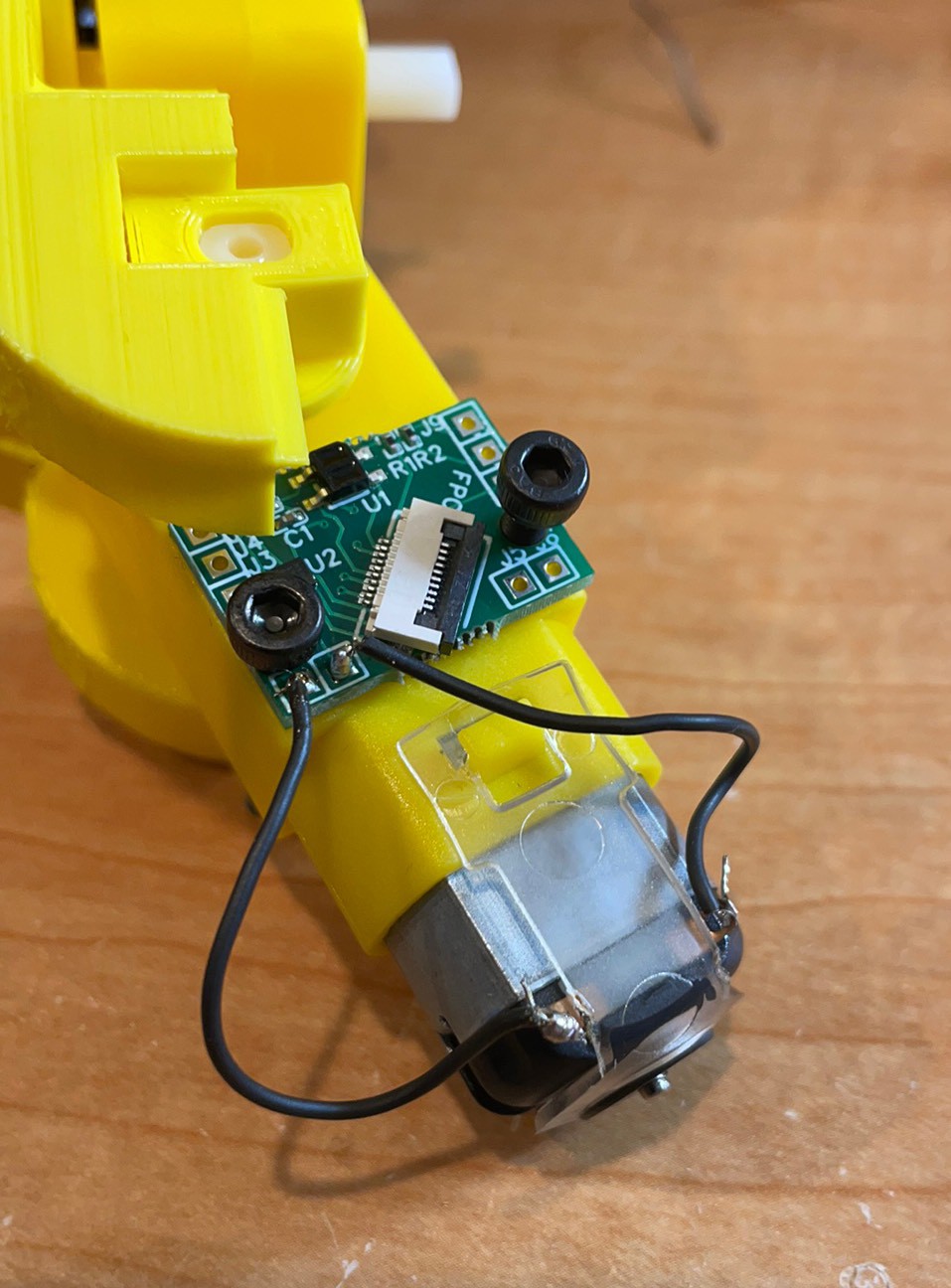
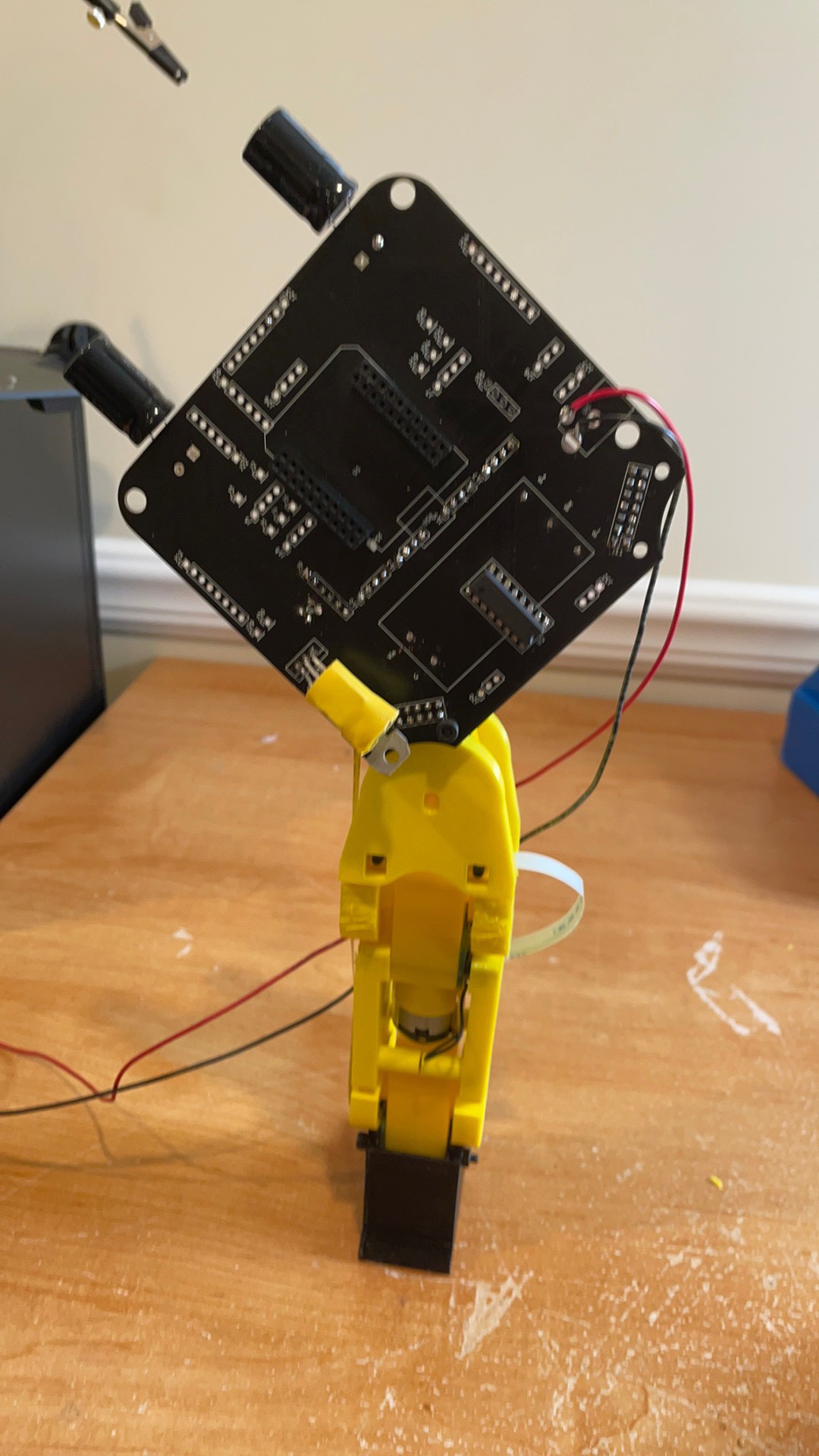
shane.snipePins on top. Note Tibia and Femur locations. Silver traces down, blue spacer up.
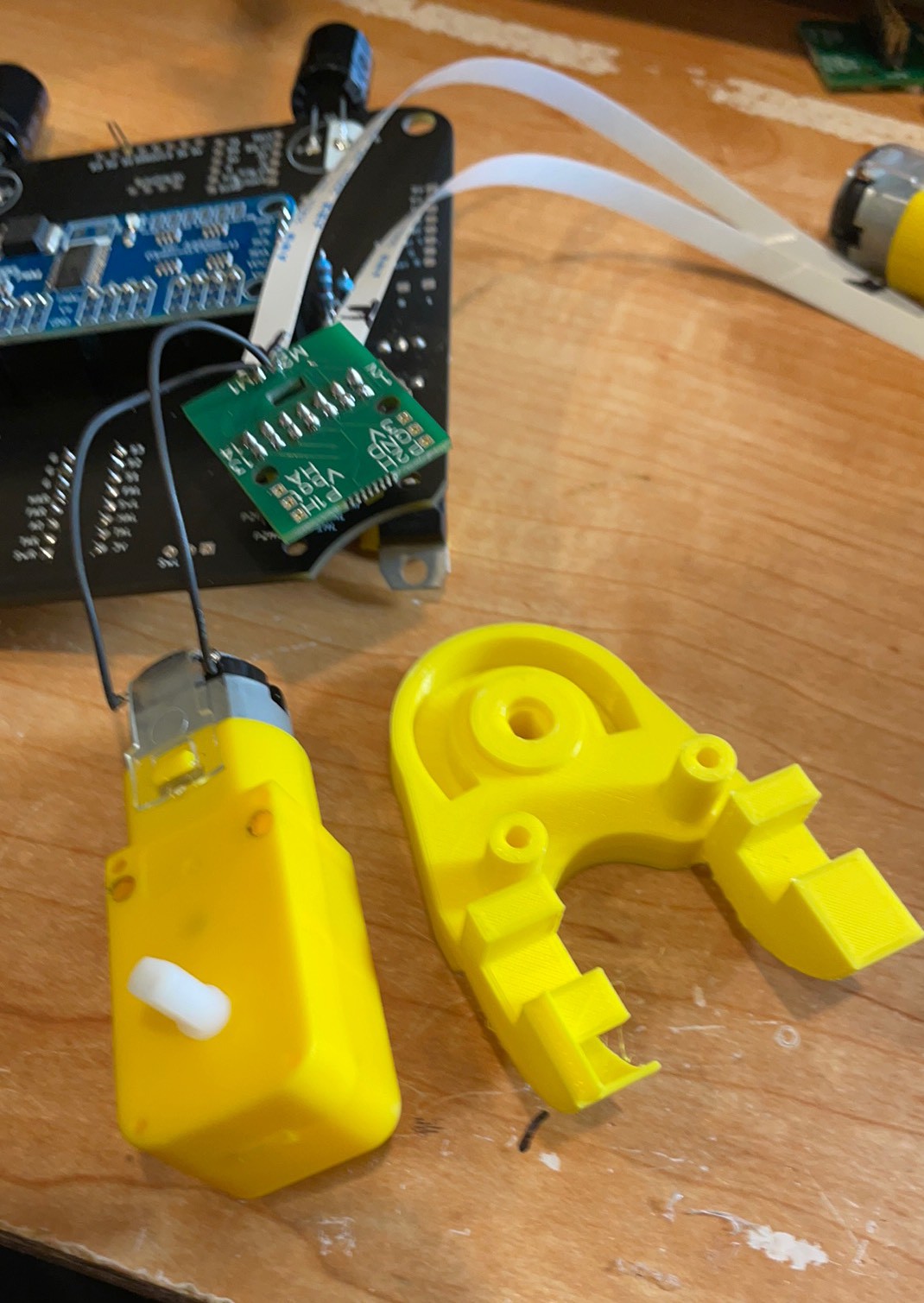
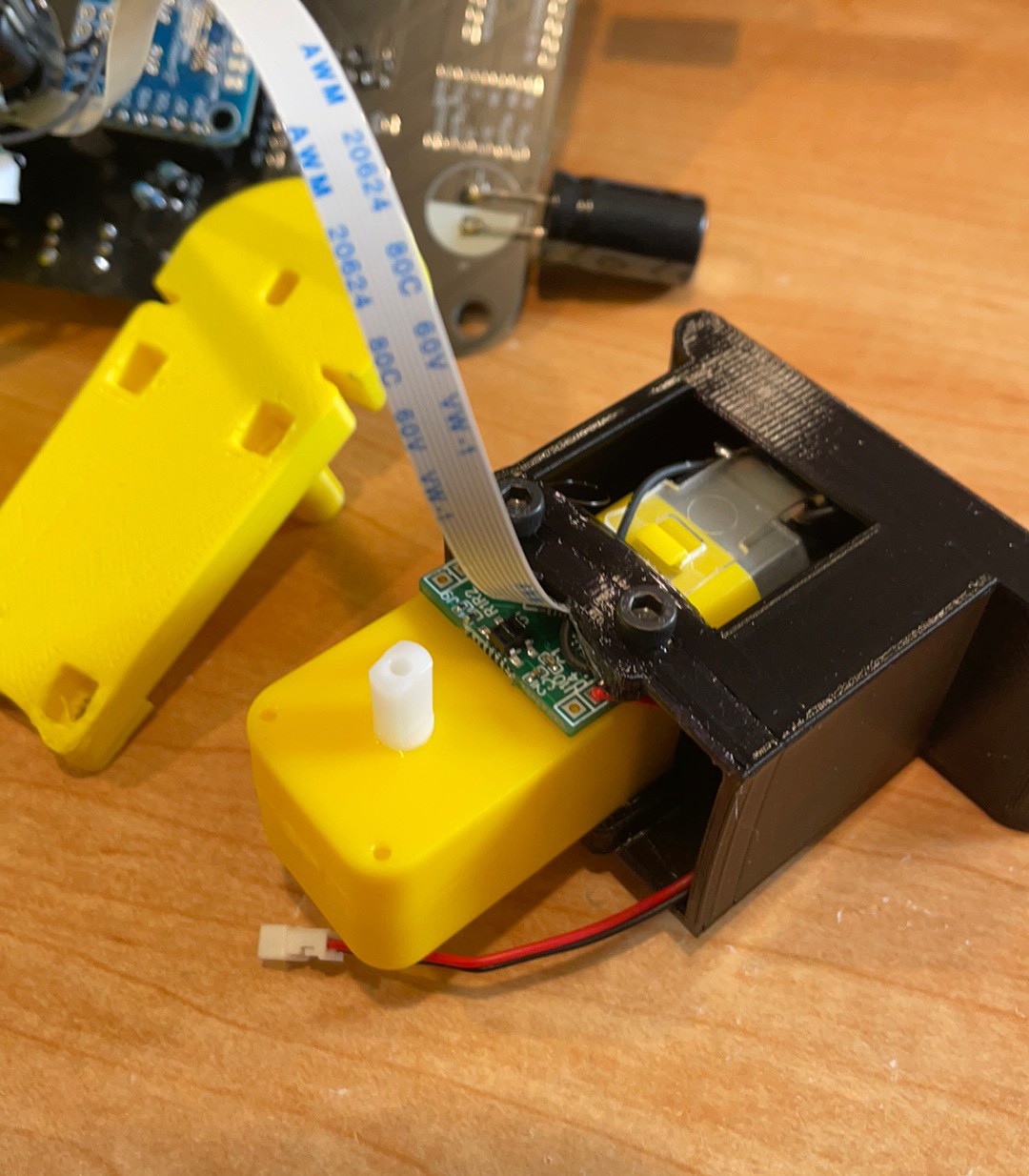
Solder wires to motor.
Sandwich motor, sensor board and hip joint with 40 mm screws.
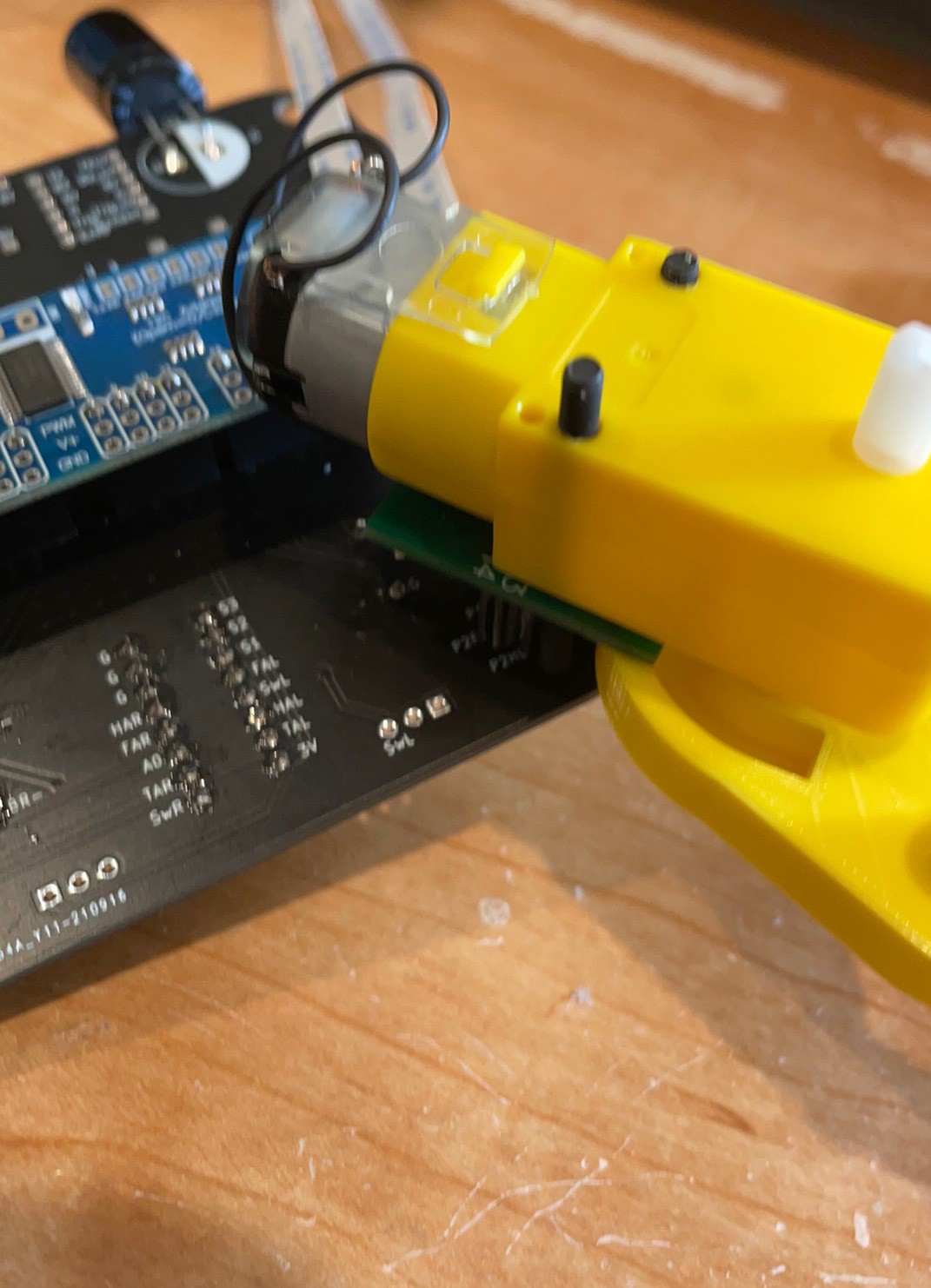
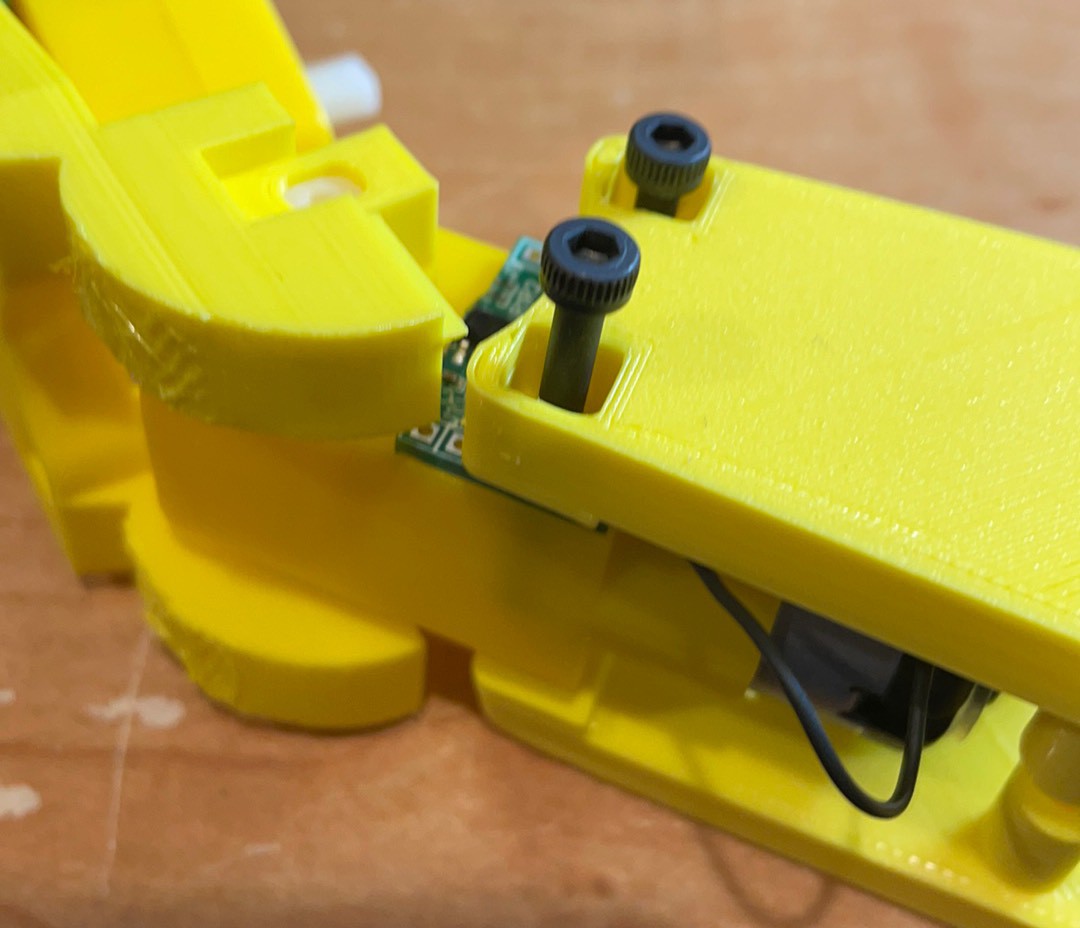
Sandwich from the front.
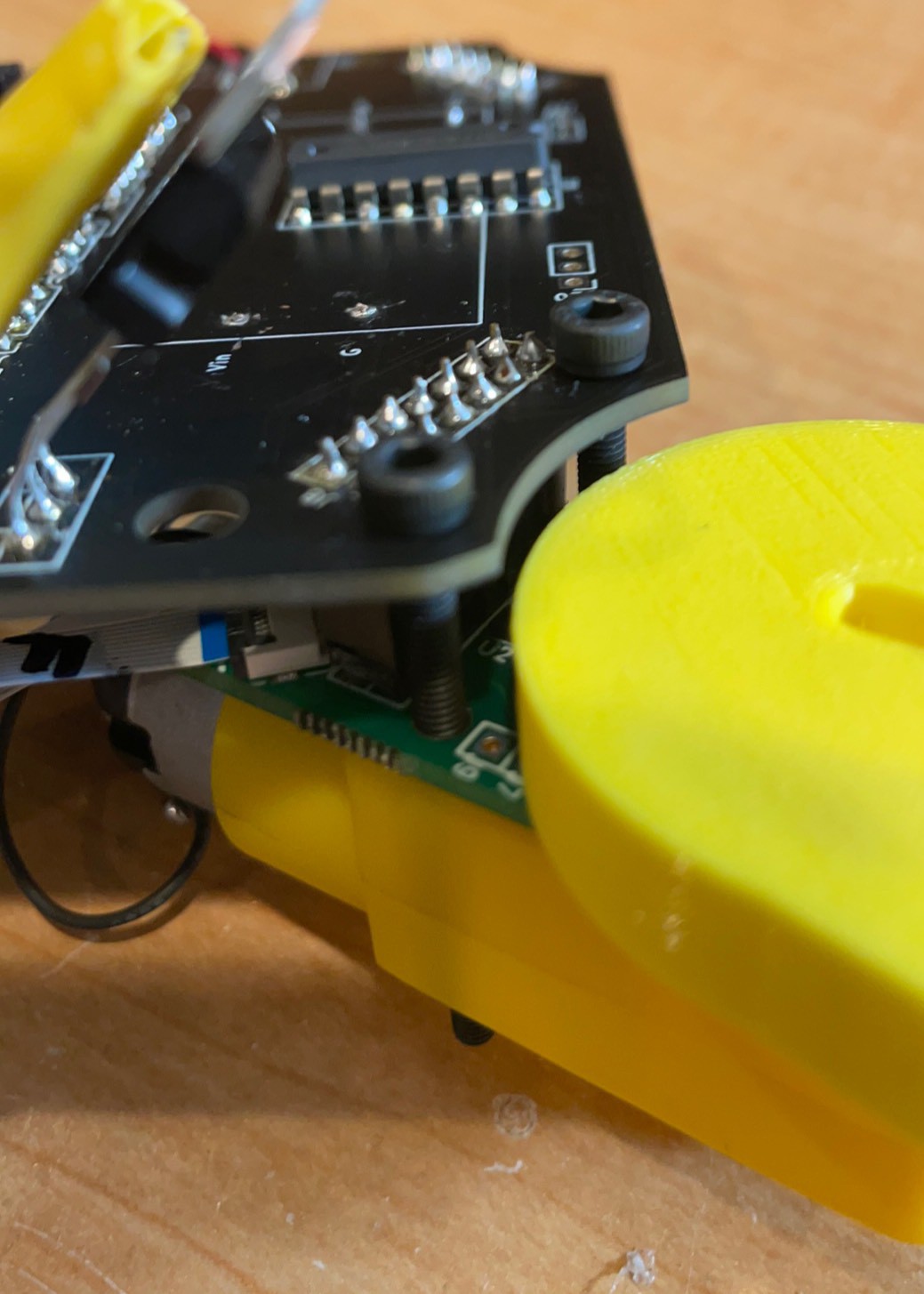
Temporarily attach with screws and solder on the wires.
Sandwich motor and board again. Slight three handed operation.
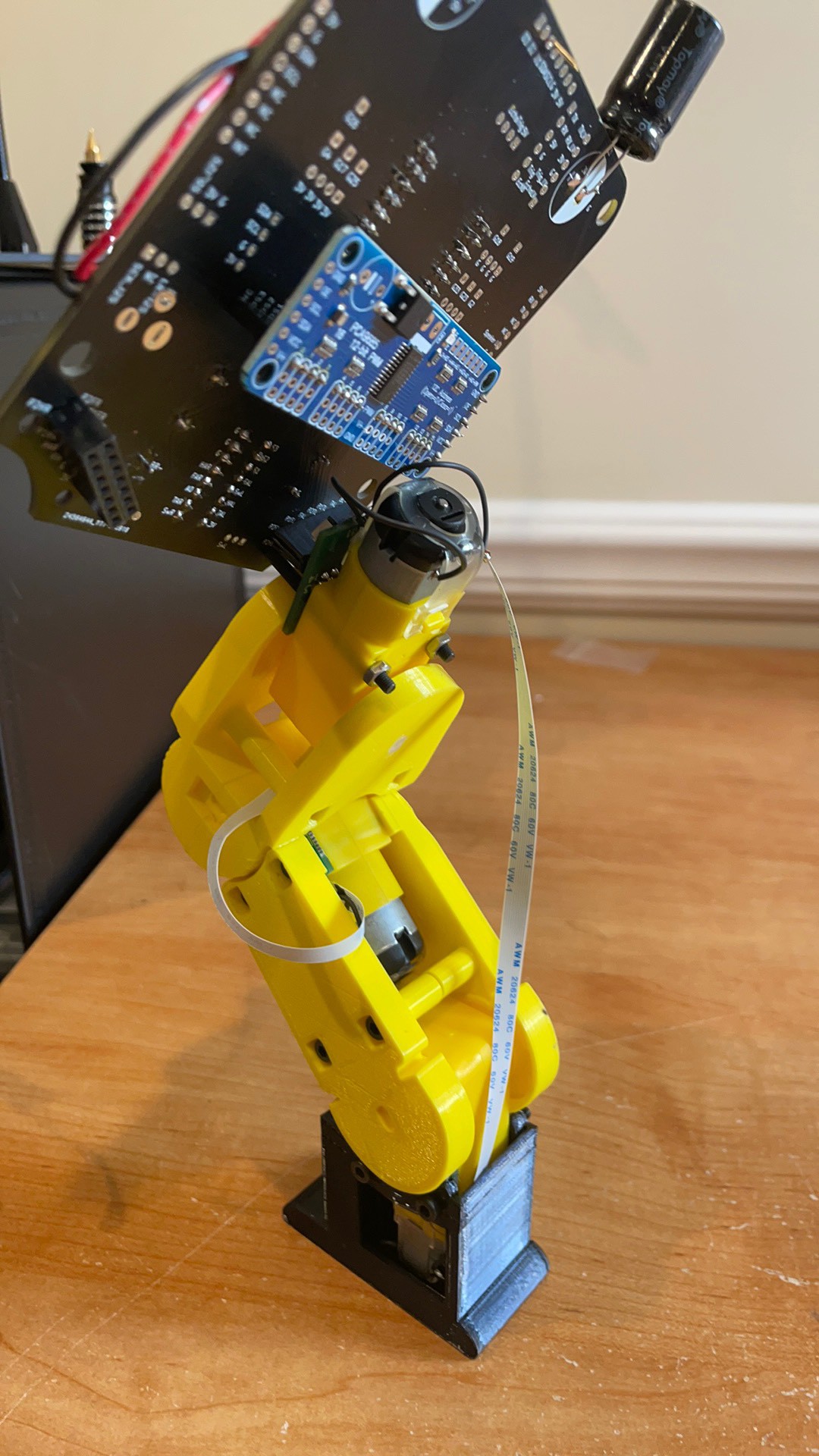
Back up one and attaché the FFC first.
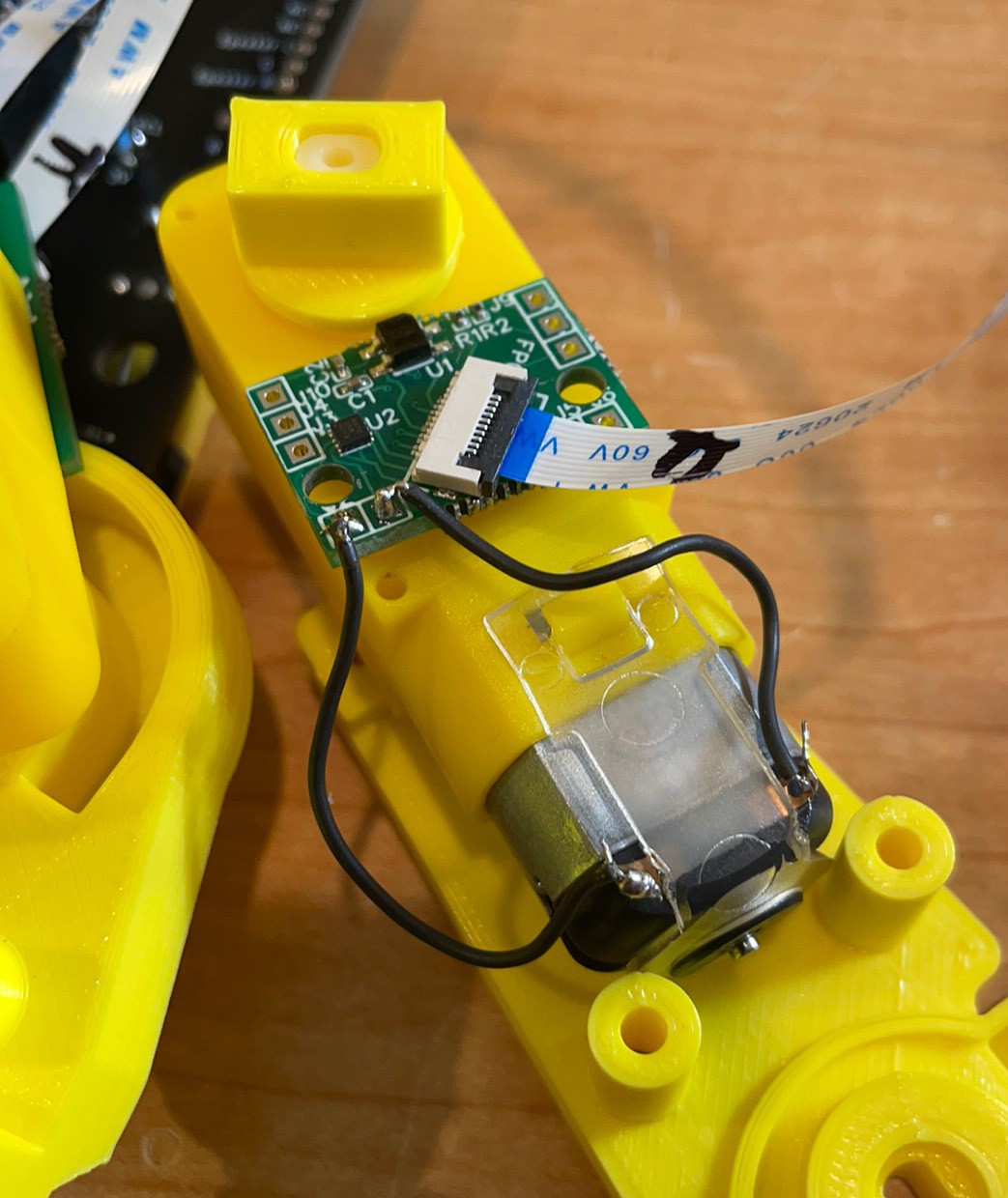
Finish motor sandwich.
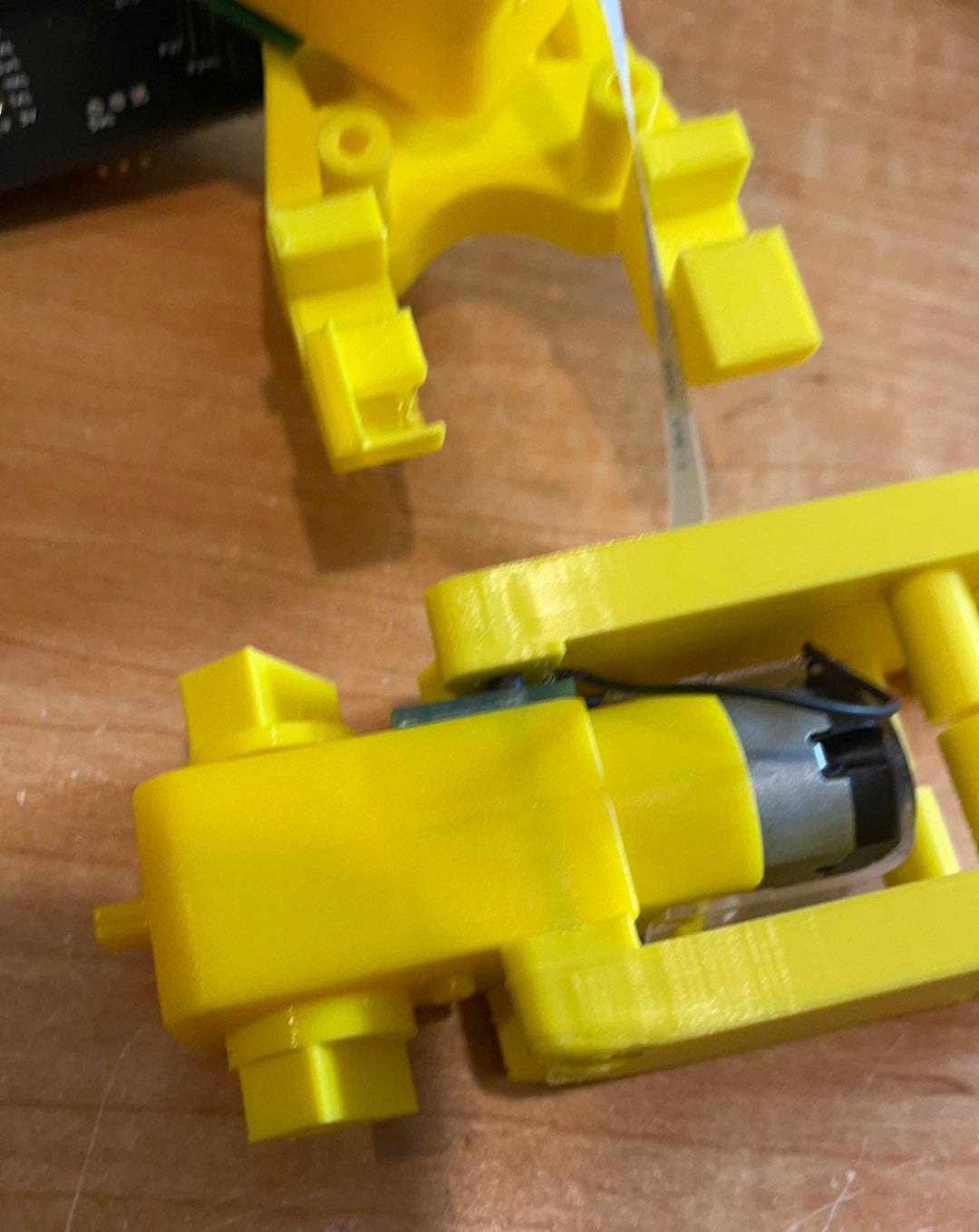
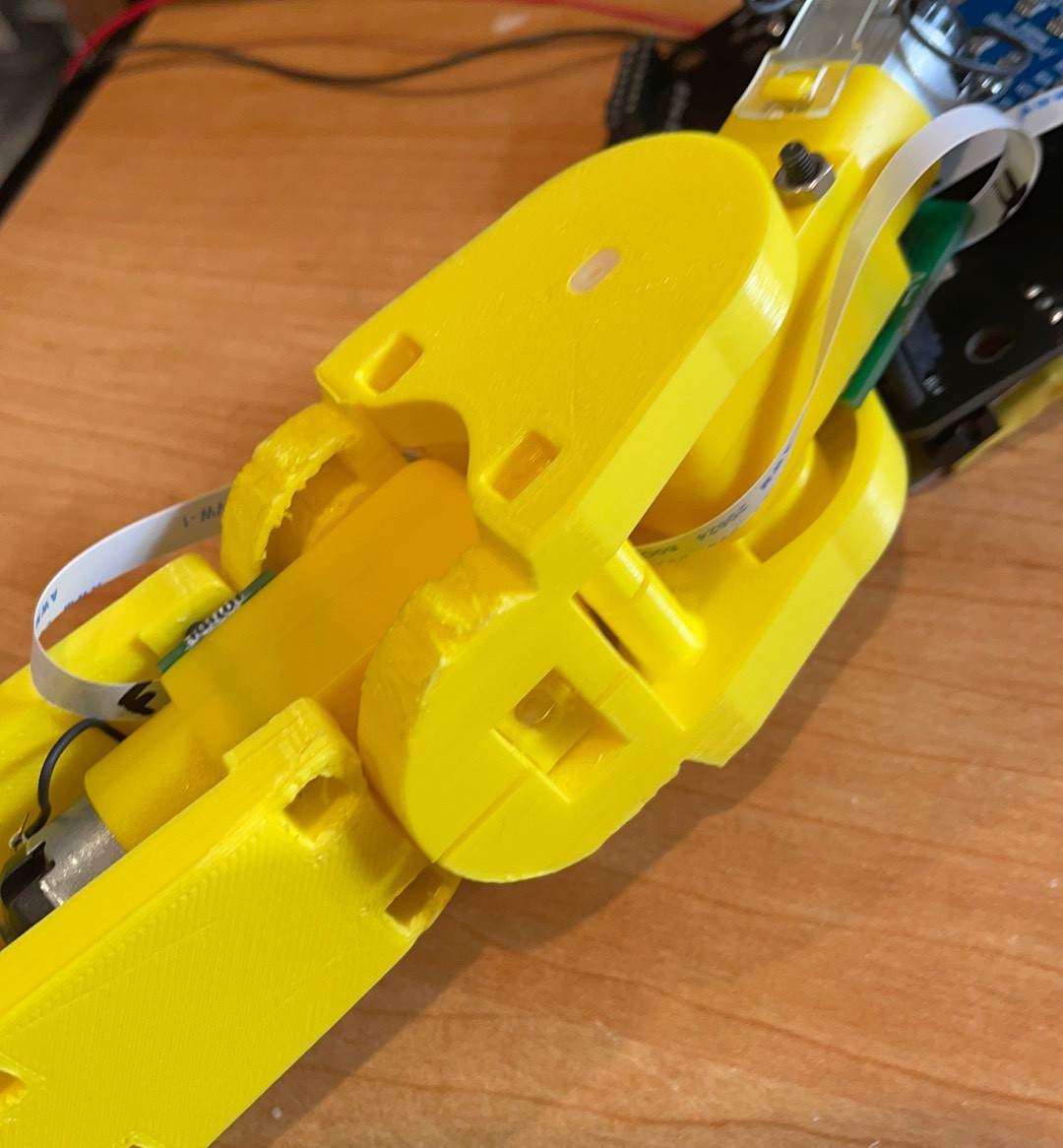
Put motor adapters in hip. Using one skinny and one fat.
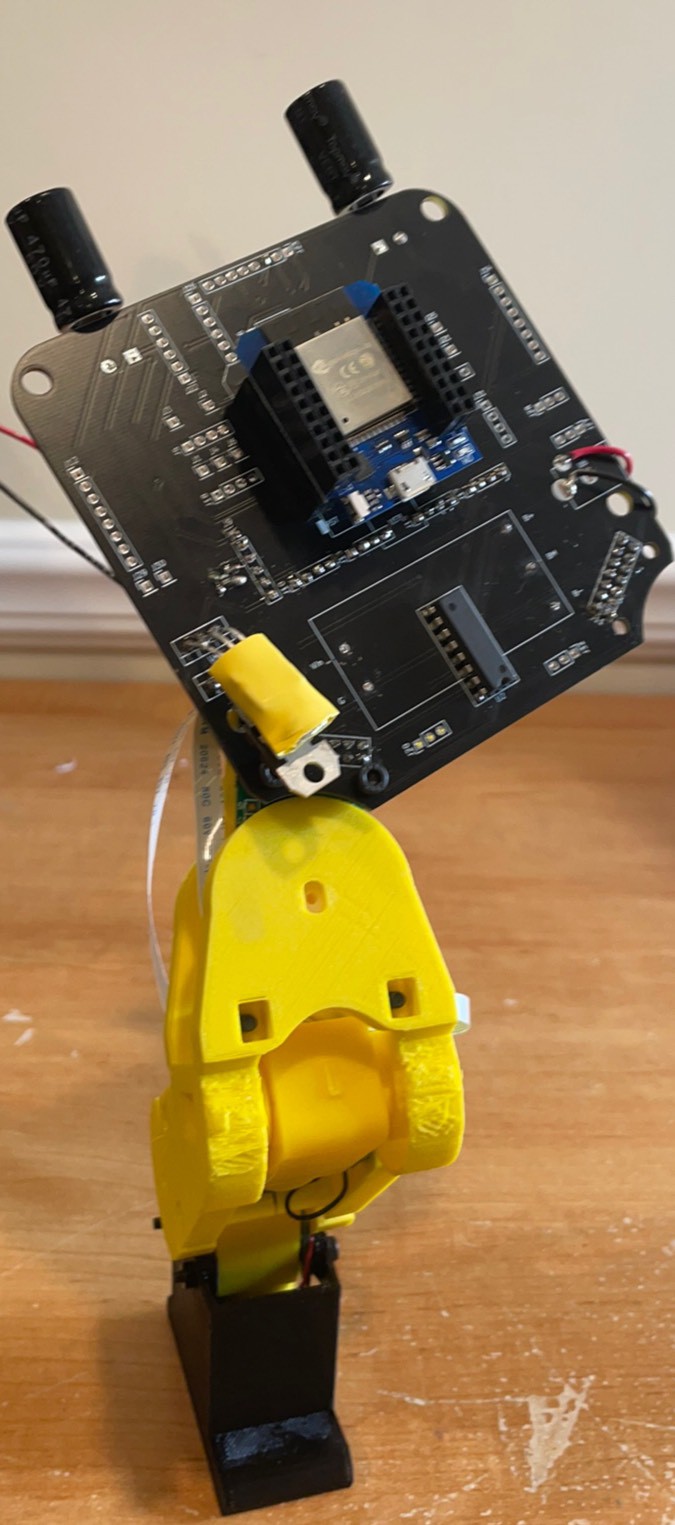
Put top of hip on and thread the FFC through the middle.
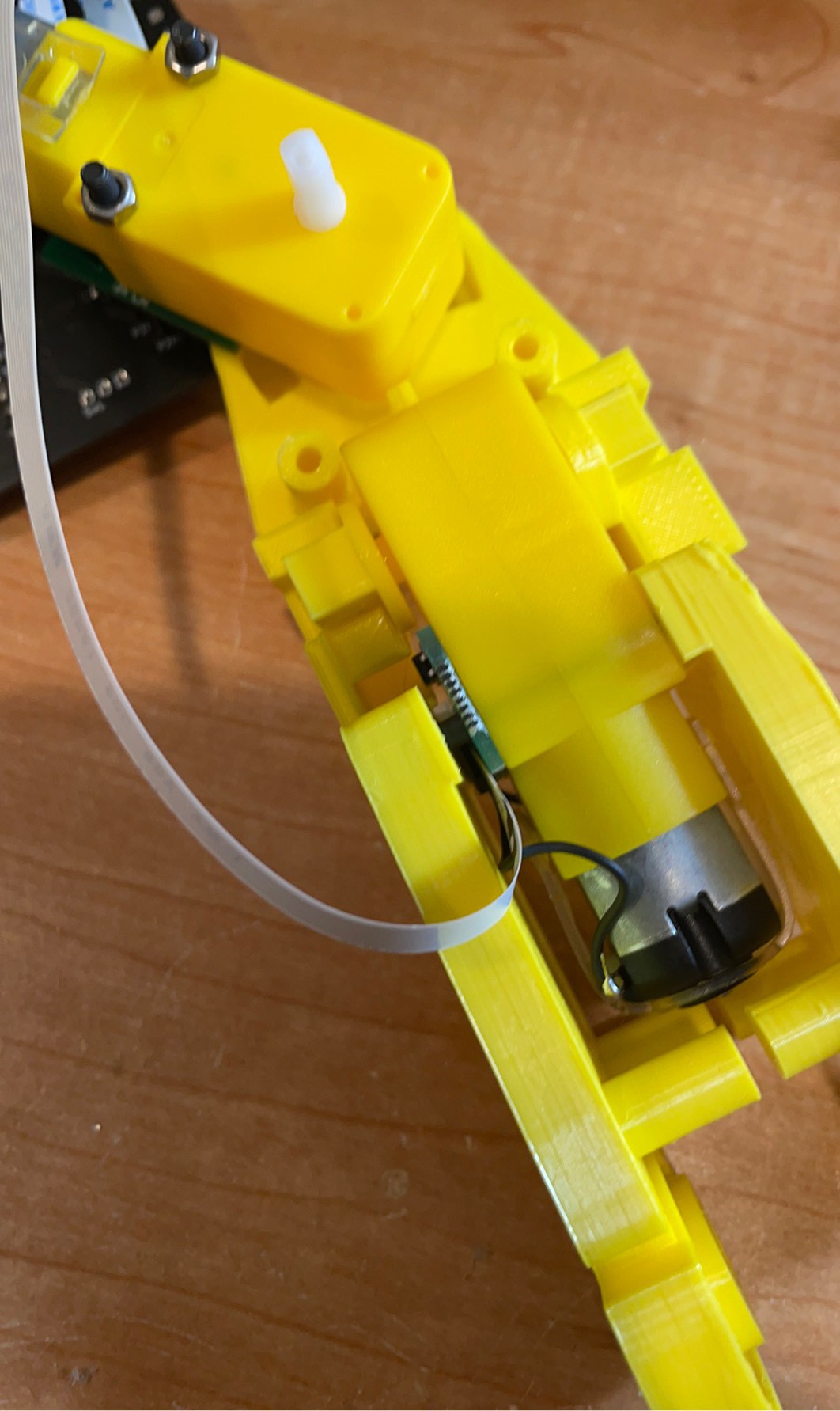
Attach the motor wires to the Tibia board and the FFC. Screw it in the boot.
Attach motor to Tibia sensor and put the top back on. Screw it down. I do not have the right FFC here so it is not routed yet.
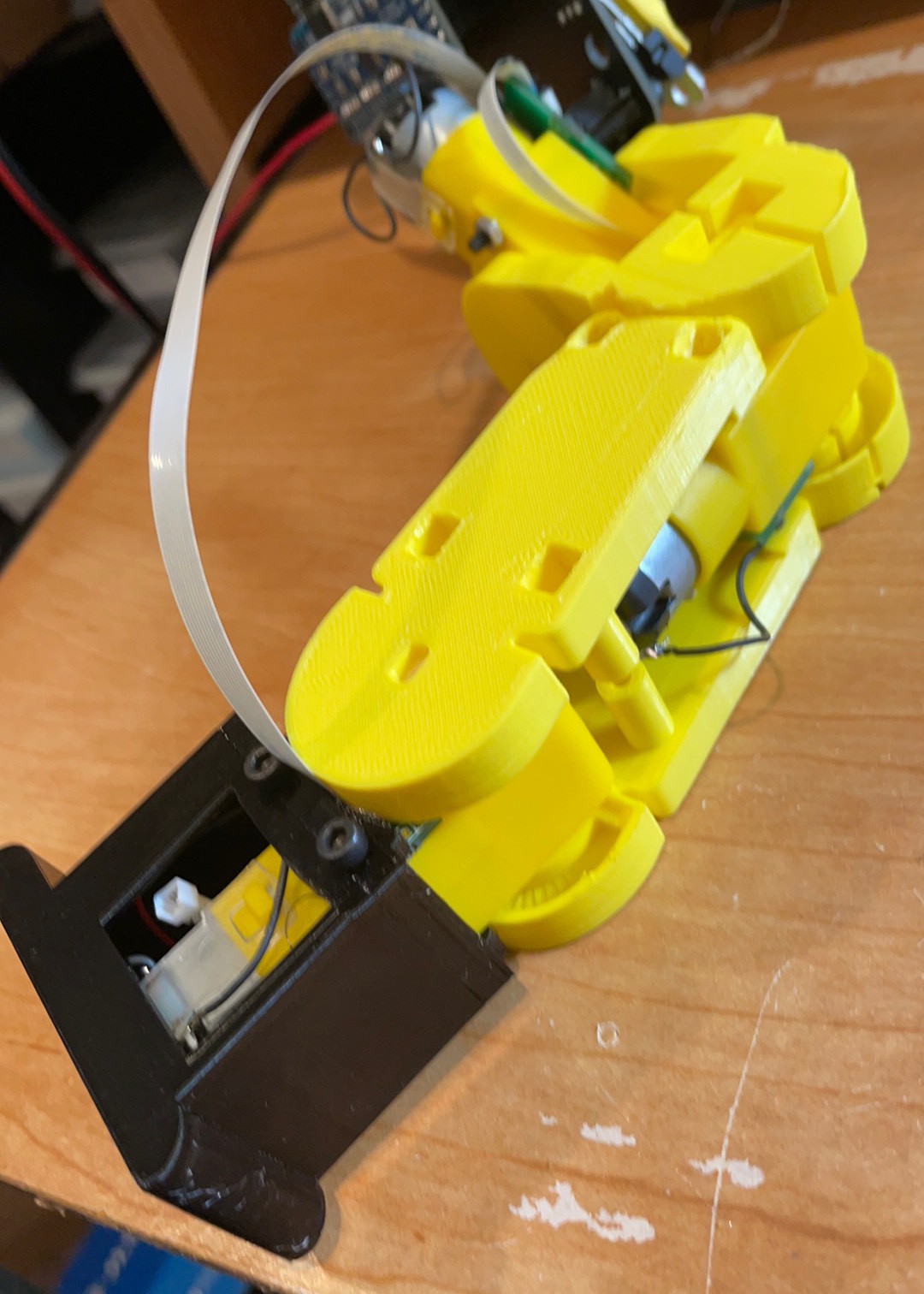
Boots on backward!
Turned the boot around. Should be able to test the sensors as I wait for the longer FFCs?✌️
From the back.
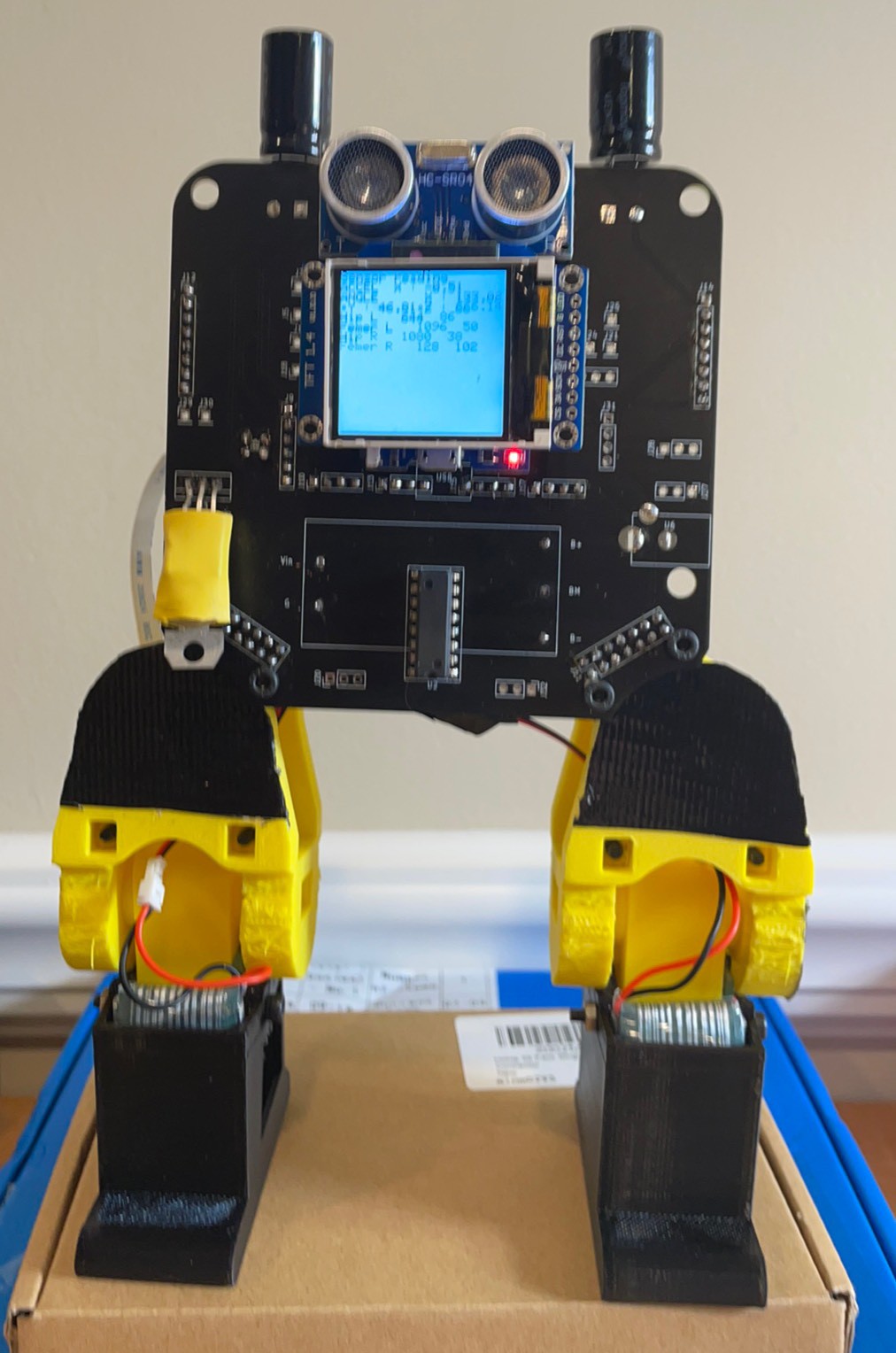
Confirming electronic function of Cya Short
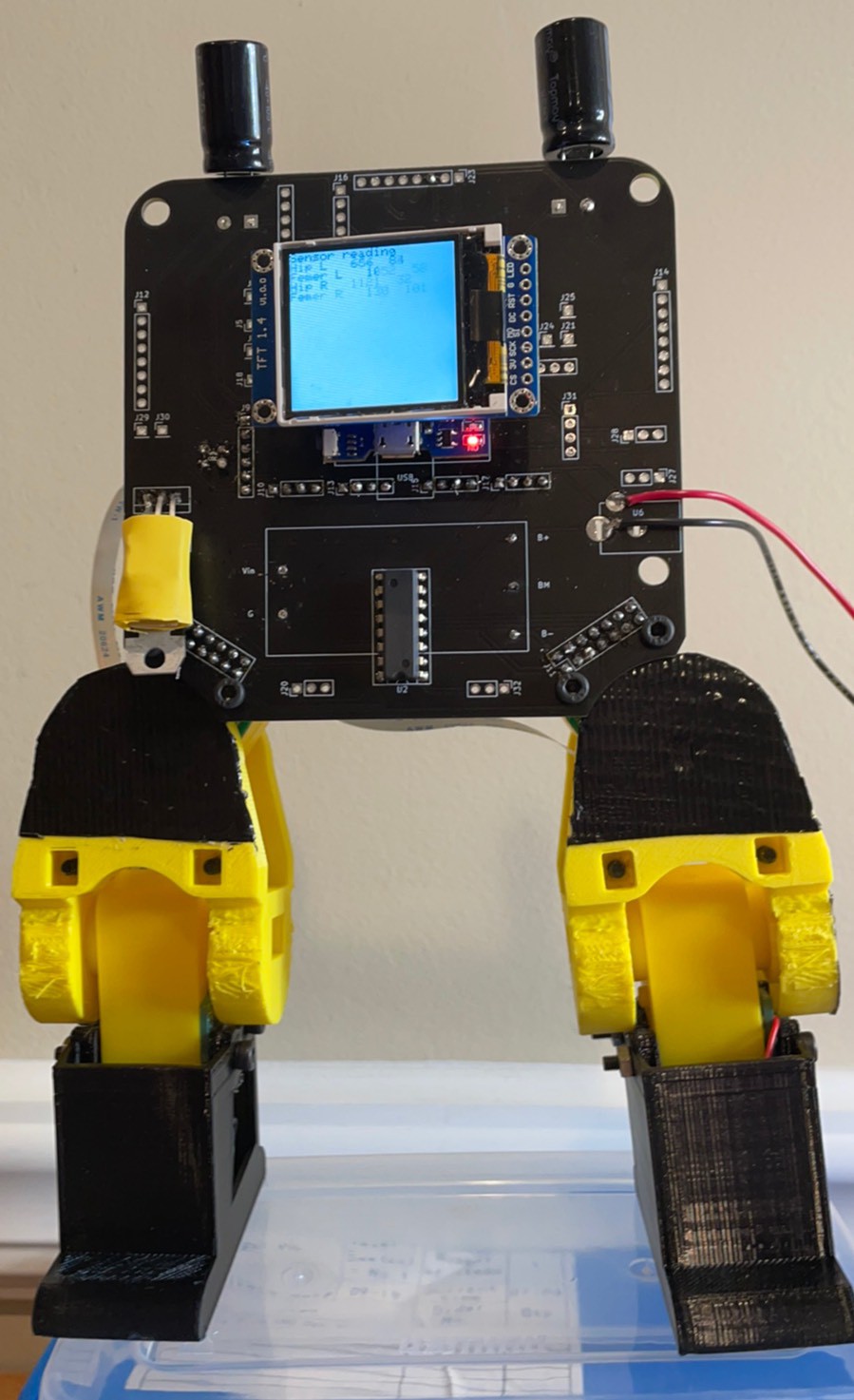
Showing x g,s and angles.
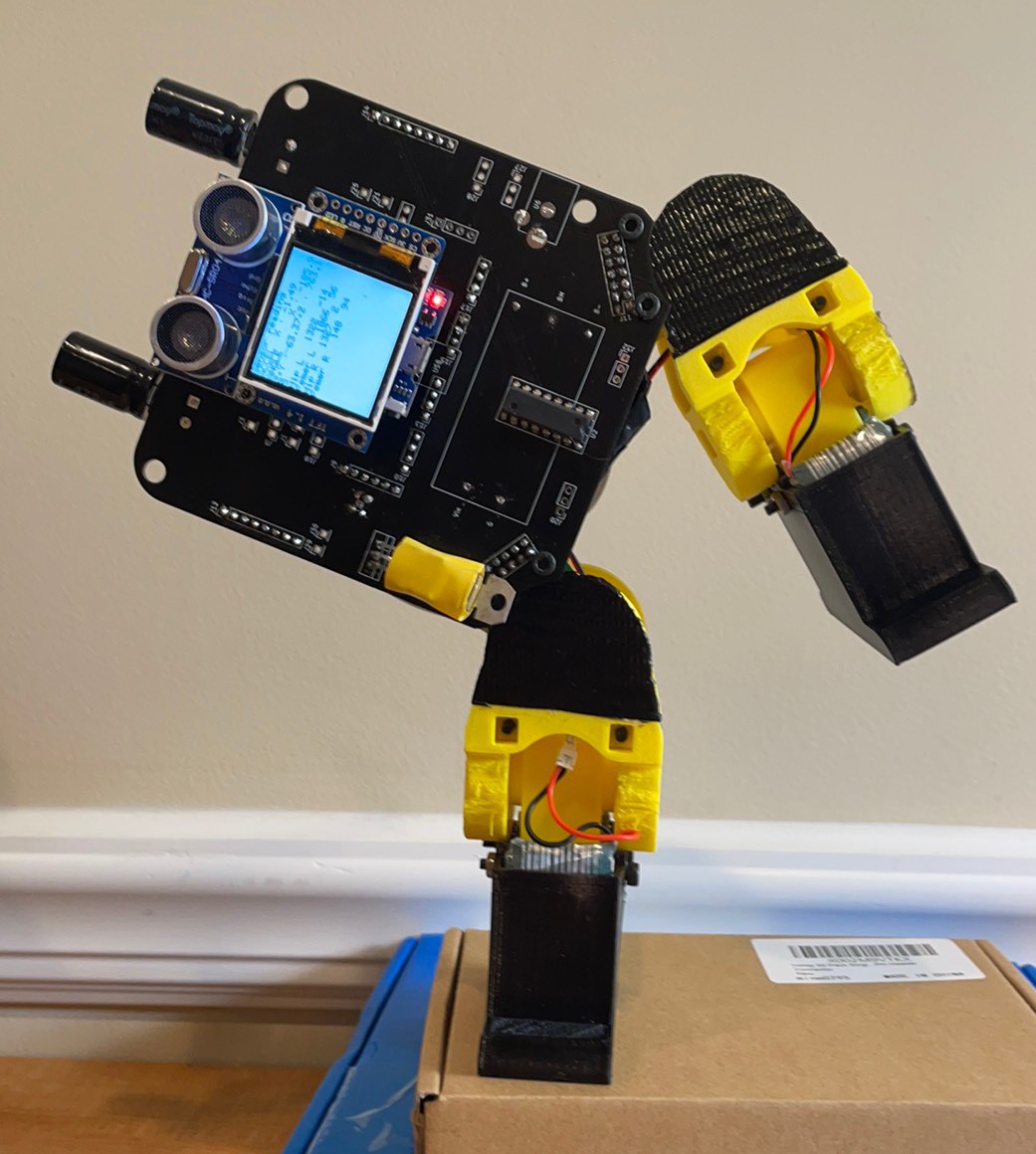
X g’s moved to 1.48
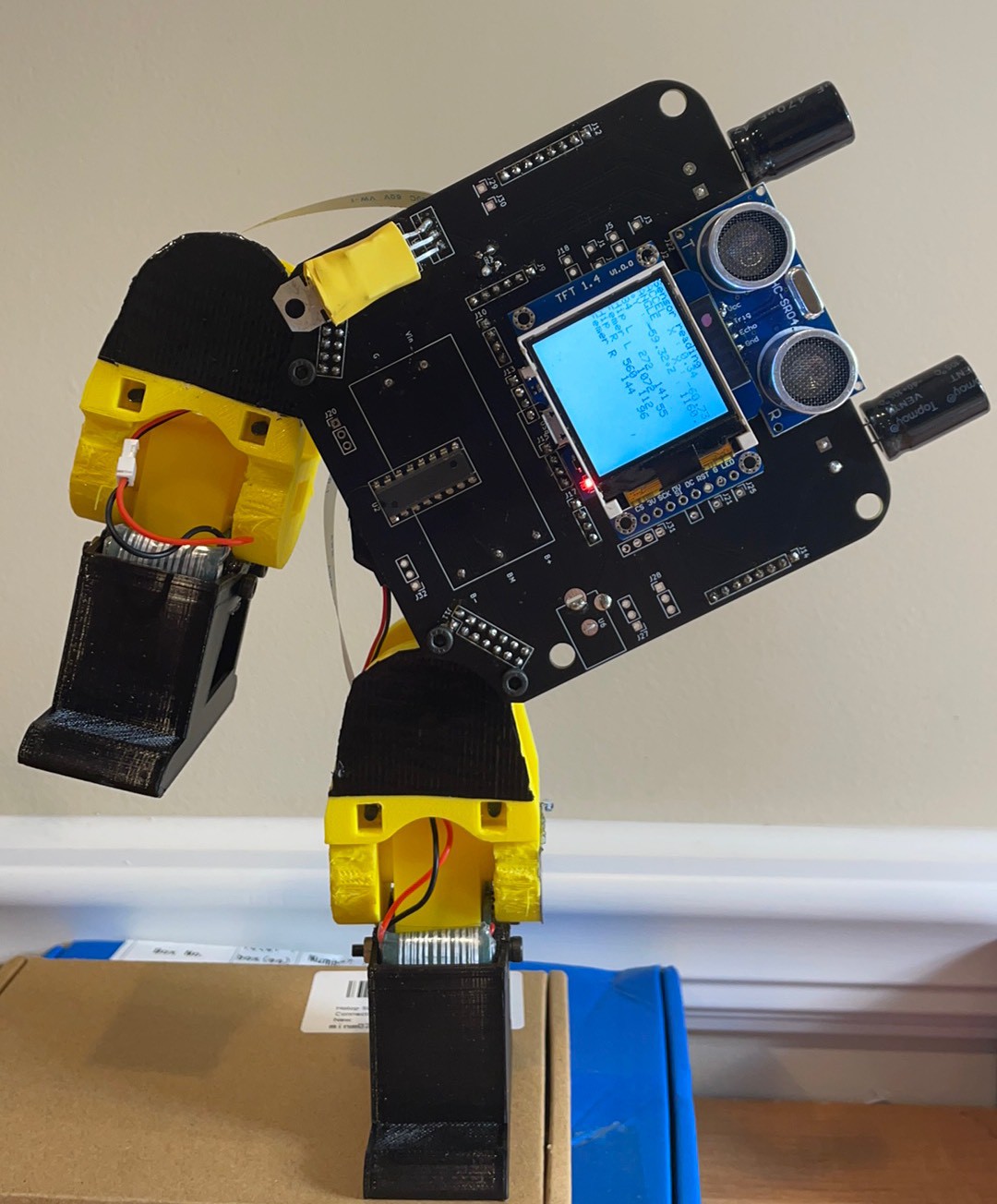
G’s moved to .34.
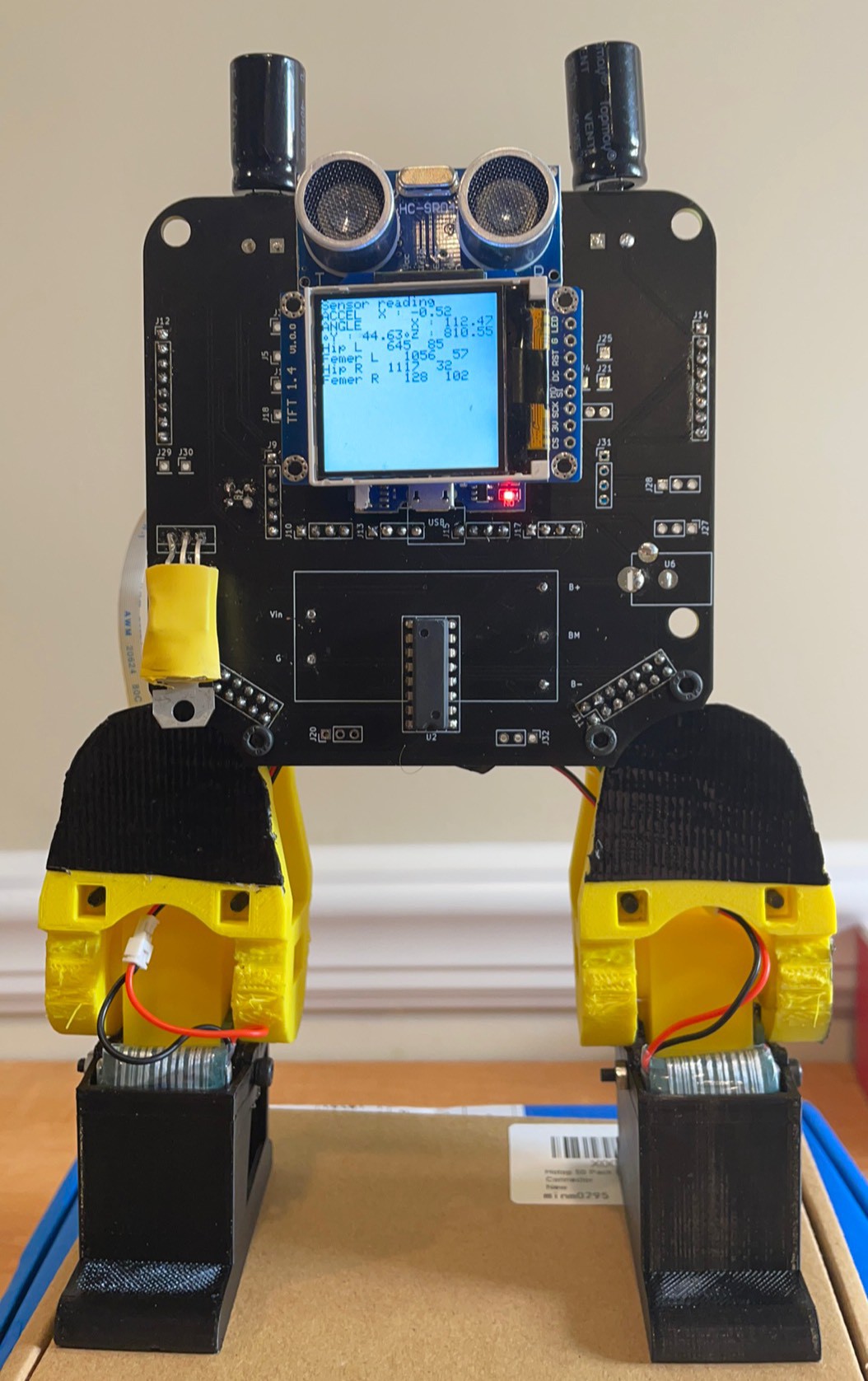
Added ultrasonic distance at the bottom
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.