 shane.snipe
shane.snipeSo yesterday I got my care package from Ali Express. I have the blue metal gear motors, an abundance of FFCs and some tablet speakers. So before I jump to the next level, I need to take care of getting the basic movements from the device.
Goals
1) Define pins and movement directions.
2) Make the mapping work for 1-100.
3) Make hip motors work.
4) See if hip motor activation can make Cya stand up from a split.
First, because the PCA 9685 board is symmetric, I can put the headers on with the LED to be back or the front and it will work. However, the pin definitions are all reversed as Pin 0 is now Pin 15 compared to when I had the lead facing the board.
For the shorty, there is no Tibia so if using the C2 connector for the Femur motor the following pins needed to be activated to move the motors.
When facing the front.
Right hip Pin 8 CCW
Right hip Pin 9 CW
Right Femur Pin 4 CW
RIght Femur Pin 5 CCW
Left HIp Pin 14 CCW
Left Hip Pin 15 CW
Left Femur Pin 10 CW
Left Femur Pin 11 CCW
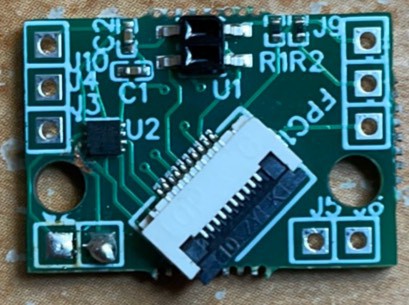
Broken trace next to the left hole stopped the motor from running.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.