Sequre ODESC3.6dual drive with 6374 motor and RC remote control for speed control
1.USB connection with PC , Raspberry PieRos , etc , for programming control

2.DC power input interface

3.Connect the M1 motor cable

4.Connect power resistor

5.Connect MO motor wire

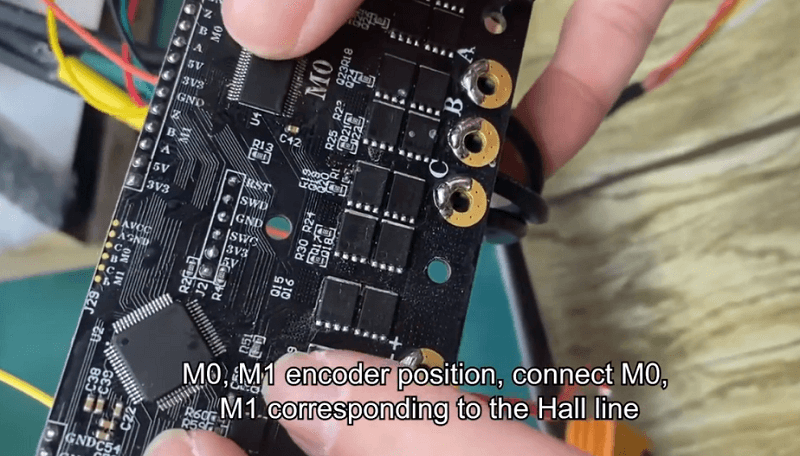
6.Mo , & M1 encoder position , connect MO. M1 . Corresponding to the Hall Line
7.MO Hall wire connection

8.M1 Hall wire connection

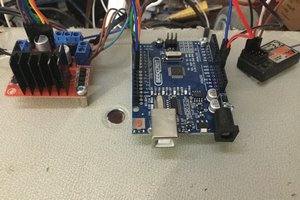
9.RC receiver connected to ODESC

10.USB connection PC end Setting Control ODESC

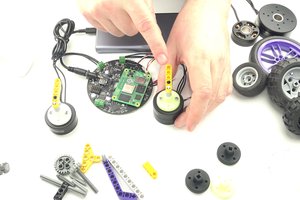
11.Calibration detection M1 Hall sensor

12.Cut off the PC and turn on the RC remote control to match the receiver. Use the RC remote control to control the motor stably.

 Artur Majtczak
Artur Majtczak
 Jason
Jason
 KushagraK7
KushagraK7