 jdelbe
jdelbe
This was the very first version of Tobi-P.
Here the open-loop teleoperation is demonstrated, showing that the main software-hardware chain is working, from the workstation keyboard to the target motors. It was an important milestone to validate the framework (ROS), as well as the choice of the core components.
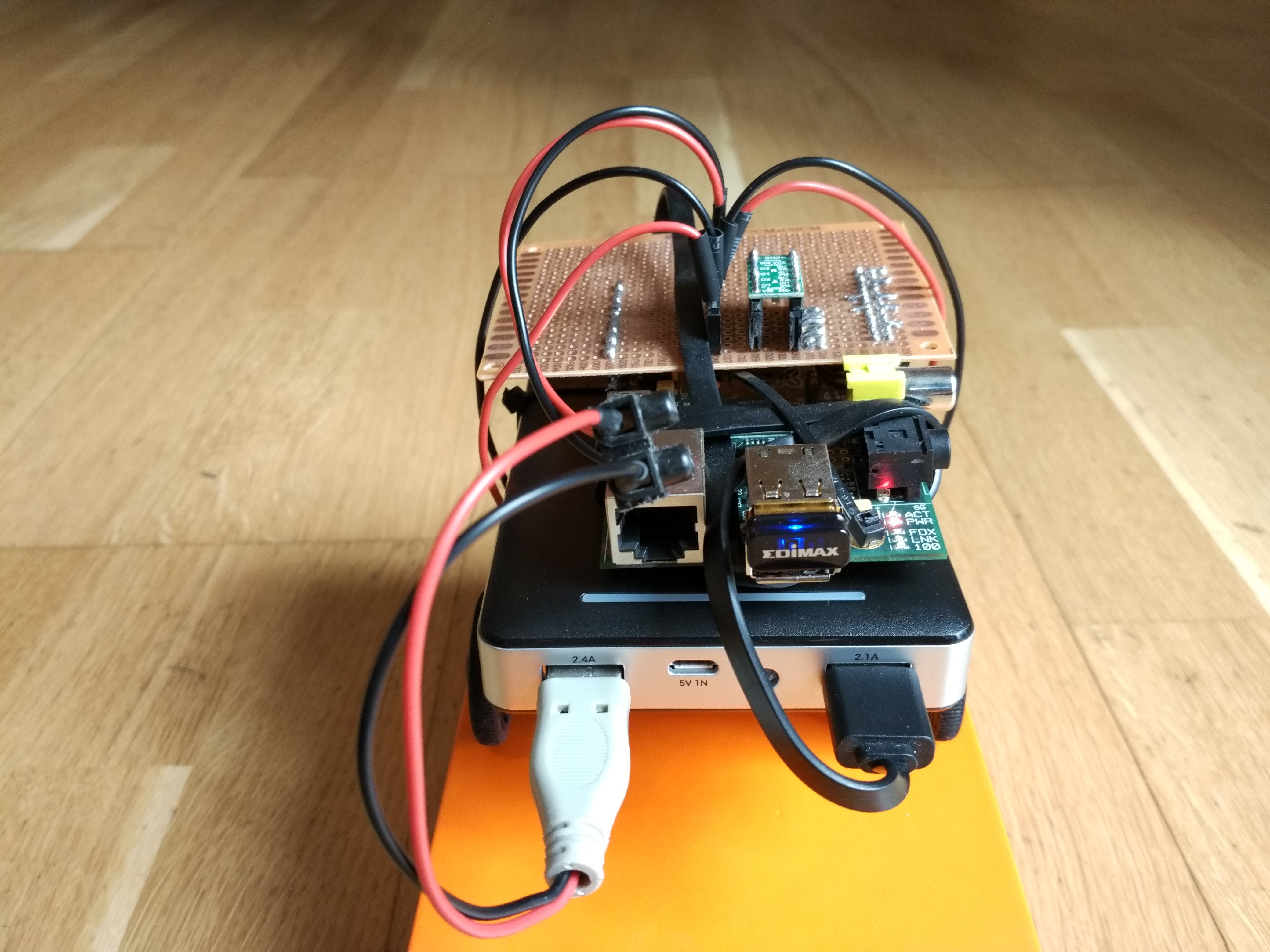
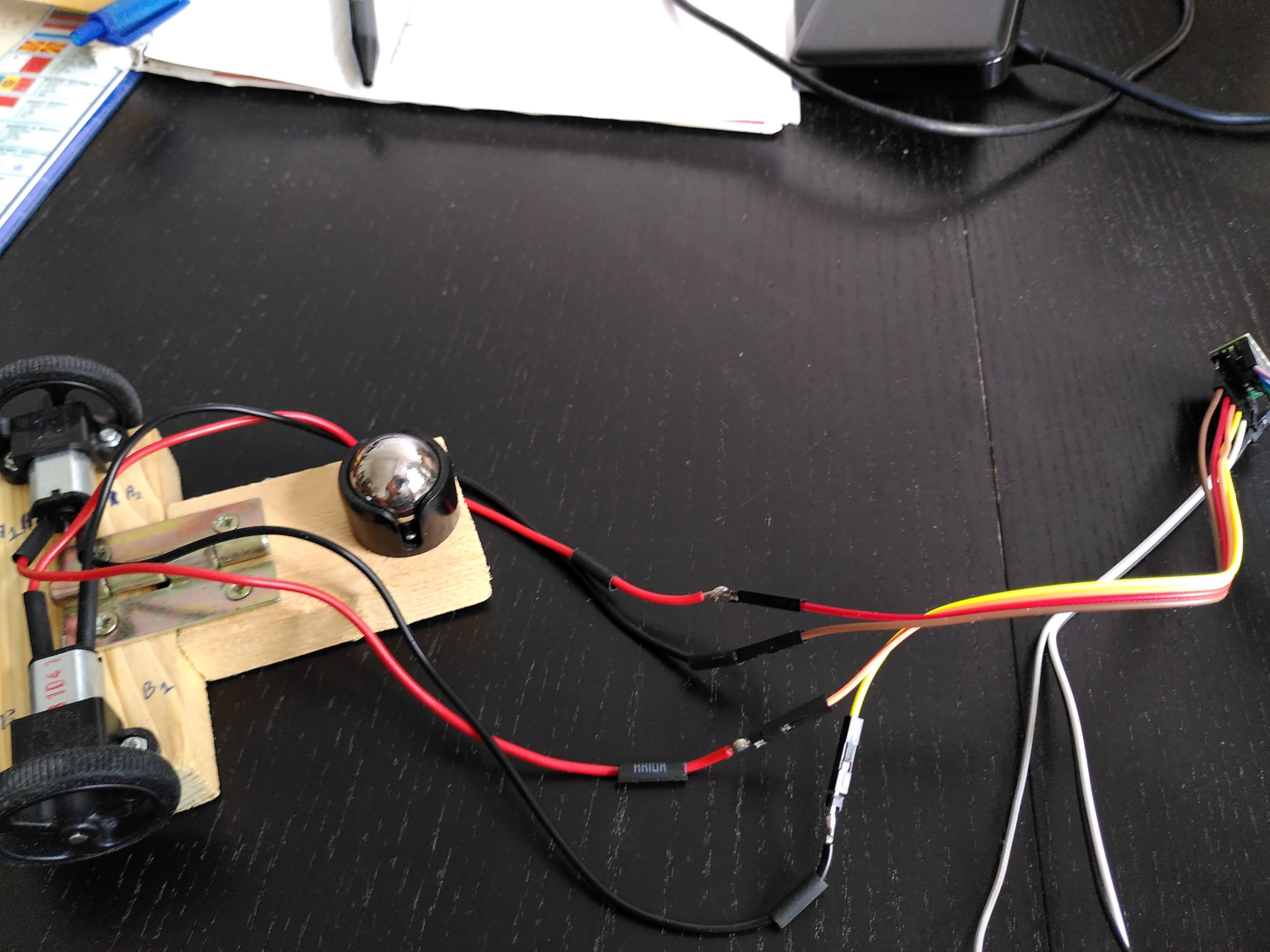
We can already see that the mechanical base will need some serious rework, and that soldering is not one of my forte.
https://gitlab.com/jdelbe/tobi-p/-/releases/0.1.0
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.