 Mike Rigsby
Mike RigsbyNow I'm trying a thin Nema 17 stepper motor to replace the geared dc wheel driver motor--it works!
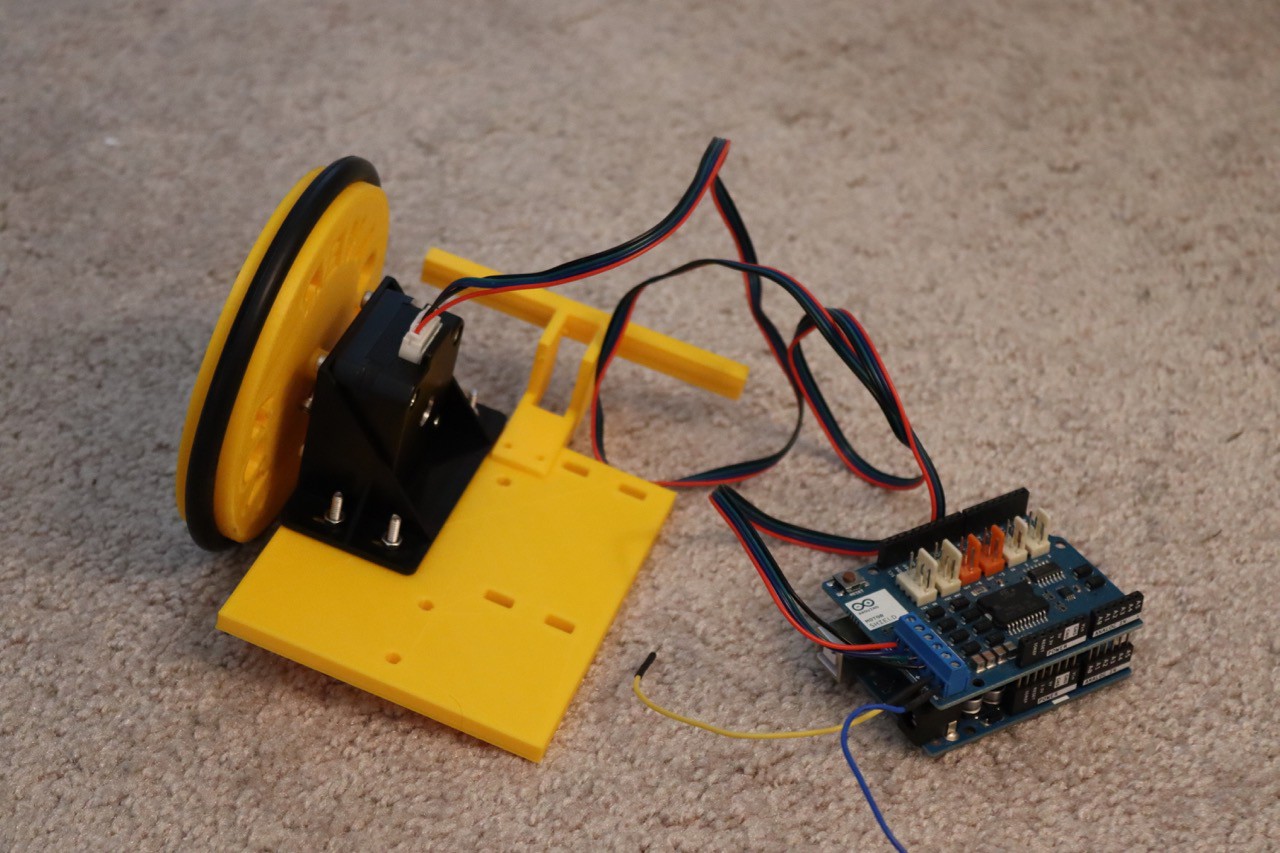
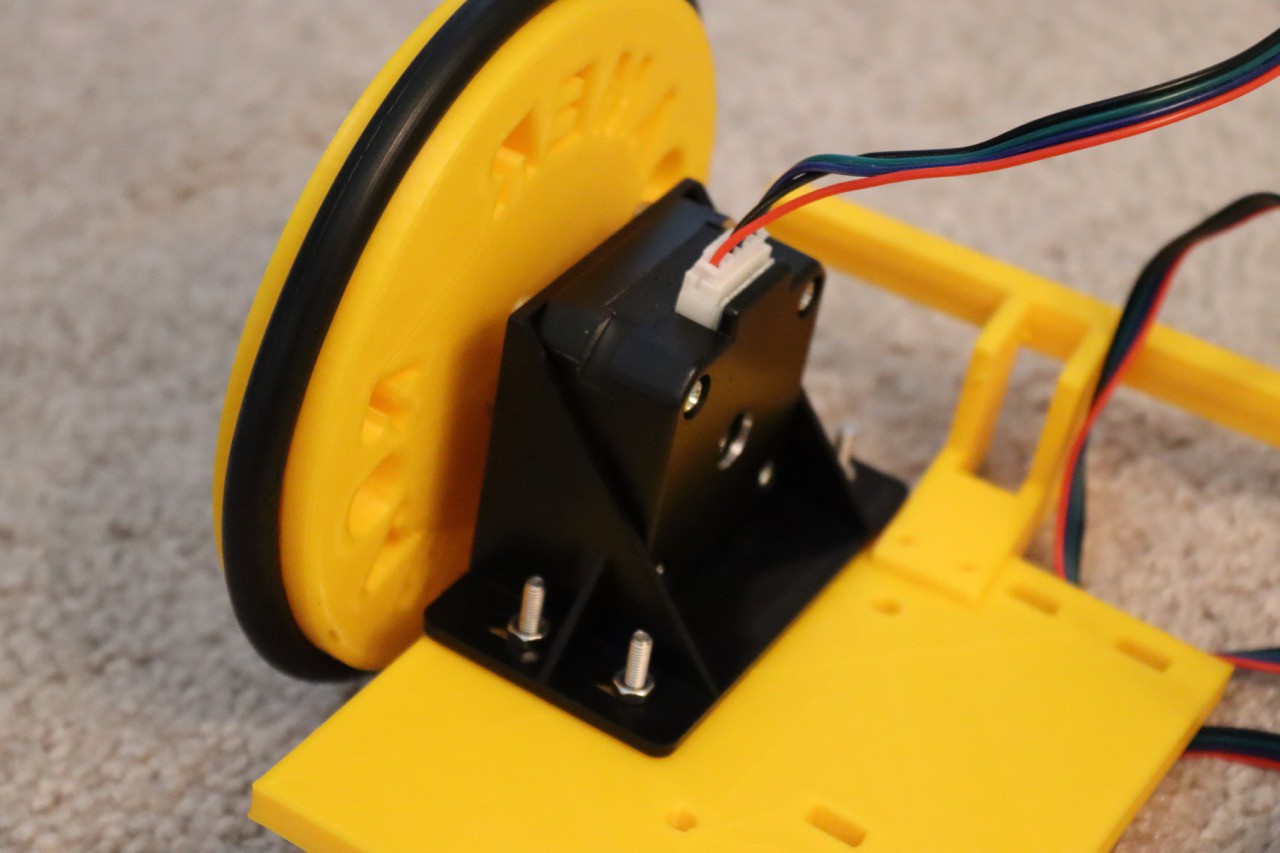
I'm driving the motor with an Arduino motor shield--motor pin 1 to B-; motor pin 4 to B+; motor pin 6 to A-; motor pin 3 to A+.
Code (stepper motor short) follows:
int delaylength=10;
int volt=220;
void setup() {
pinMode(12,OUTPUT);
pinMode(13,OUTPUT);
pinMode(9,OUTPUT);
pinMode(8,OUTPUT);
}
void loop() {
//round 1
digitalWrite(9,LOW);
digitalWrite(8,HIGH);
digitalWrite(12,HIGH);
analogWrite(3,volt);
delay(delaylength);
digitalWrite(9,HIGH);
digitalWrite(8,LOW);
digitalWrite(13,LOW);
analogWrite(11,volt);
delay(delaylength);
digitalWrite(9,LOW);
digitalWrite(8,HIGH);
digitalWrite(12,LOW);
analogWrite(3,volt);
delay(delaylength);
digitalWrite(9,HIGH);
digitalWrite(8,LOW);
digitalWrite(13,HIGH);
analogWrite(11,volt);
delay(delaylength);
//end round 1
}
I supplied 10 volts dc with one amp capacity to the motor shield power input.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.