 Tharindu Suraj Chathuranga
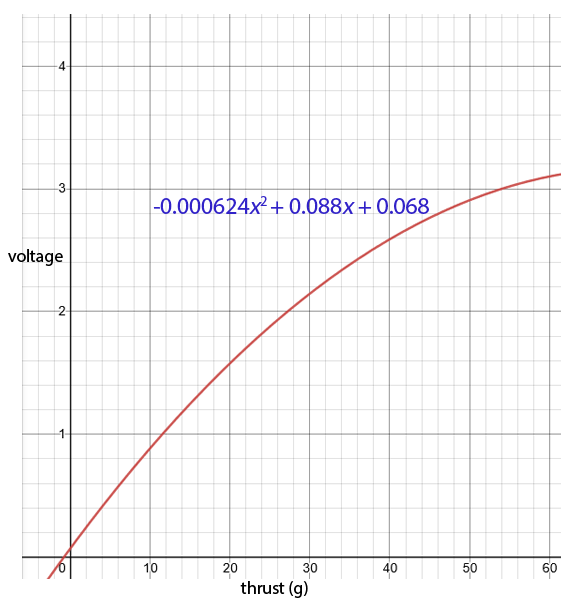
Tharindu Suraj ChathurangaThe thrust-voltage curve of coreless motors is not linear. Therefore directly applying PWM values from the PID controller cause problems in the stabilization system. To overcome this a mapping function is implemented by fitting a quadratic polynomial to the thrust-voltage curve and calculating coefficients.
The sudden start of all 4 motors causes a drop in the supply voltage levels which results in the atmega328 reset. To avoid that, a slow start function is used which increases the thrust from 0 to the base thrust level within 500ms.
Following is a testing video after adding the thrust mapping function.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.