 Guillermo Perez Guillen
Guillermo Perez GuillenNext, I show you the project wrap-up and lessons learned:
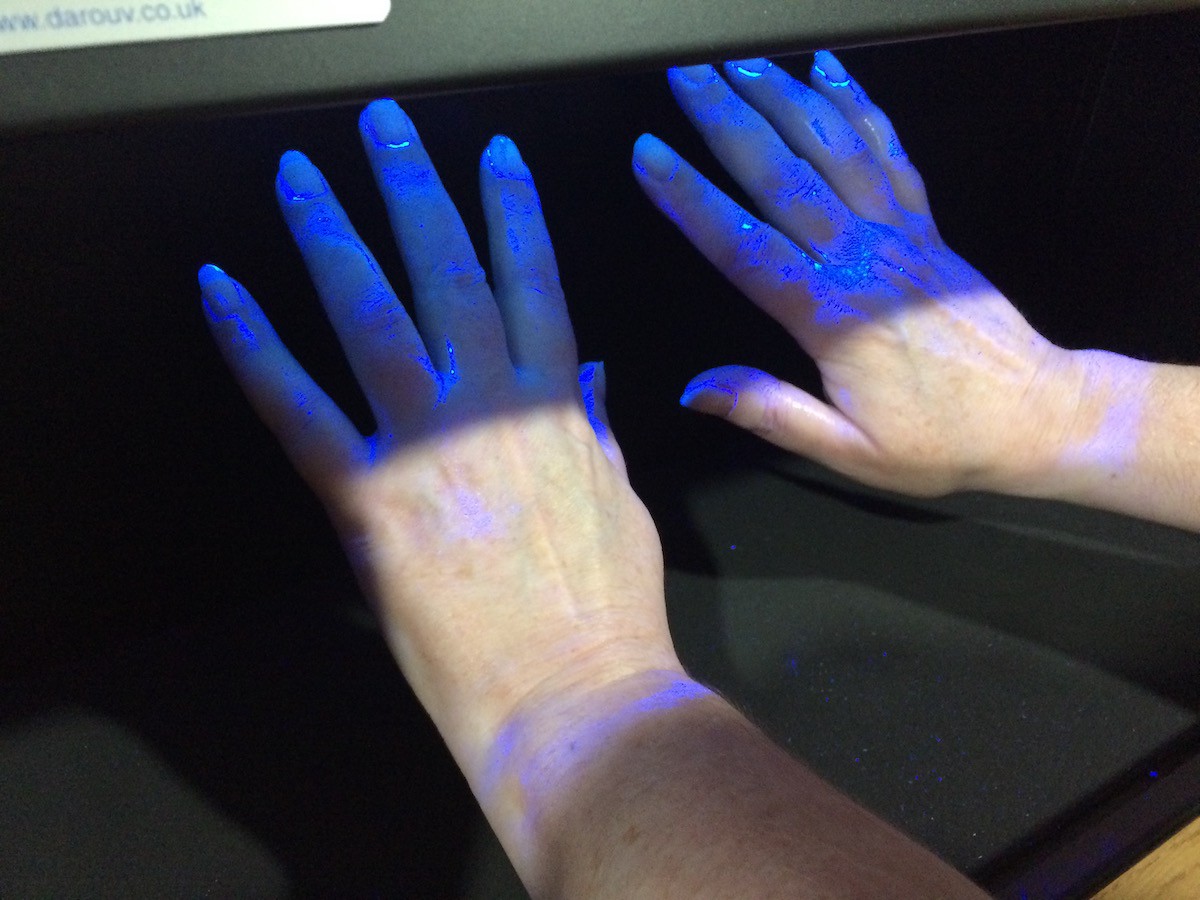
- Here I show you the problem that means the infected places in the home workplace. In particular I am talking about Covid-19 and similar dangerous viruses.
- This pandemic doesn't allow us to move freely and this solution has the advantage that the robot can move autonomously and obeying voice commands. Also, this robot can help a person with a disability to disinfect their tools, work areas, their food, their packages sent by courier, etc.
- Finally, I show you a price comparison of my solution with products that already exist in the market.
- In the first version of this project I show you the parts that need to be printed with a 3D printer. I attach these files to my Github code repository: uv-sanitizing-autonomous-robot
--> Assembling 4WD Robot Car Chassis
- Next, I show you with images how to assemble the parts printed in the previous step, the sensors and the programming boards on the "4WD Robot Car 'Chassis".
--> ECHO DOT & ESP32-WROOM-32, part 1
- In this chapter, I show you the technical specifications of the "Alexa Echo Dot" device and the ESP32-WROOM-32 board, how this project works, and the installation of the FauxmoESP library as a prerequisite.
--> ECHO DOT & ESP32-WROOM-32, part 2
- Here you will find the schematic diagram, the code that is uploaded to the ESP32-WROOM-32 board, and how to configure the Android application to connect the "Alexa Echo Dot" device with this board.
- Here I explain how to design the neural network, how to improve the neural network, and how to get the coefficients of the neural network. The programming language used is Python.
- Now it is time to add a PID controller for the autonomous robot to control the speed. For example, the robot avoids hitting an object on its left side by increasing the speed of its left wheels and reducing the speed of the right wheels.
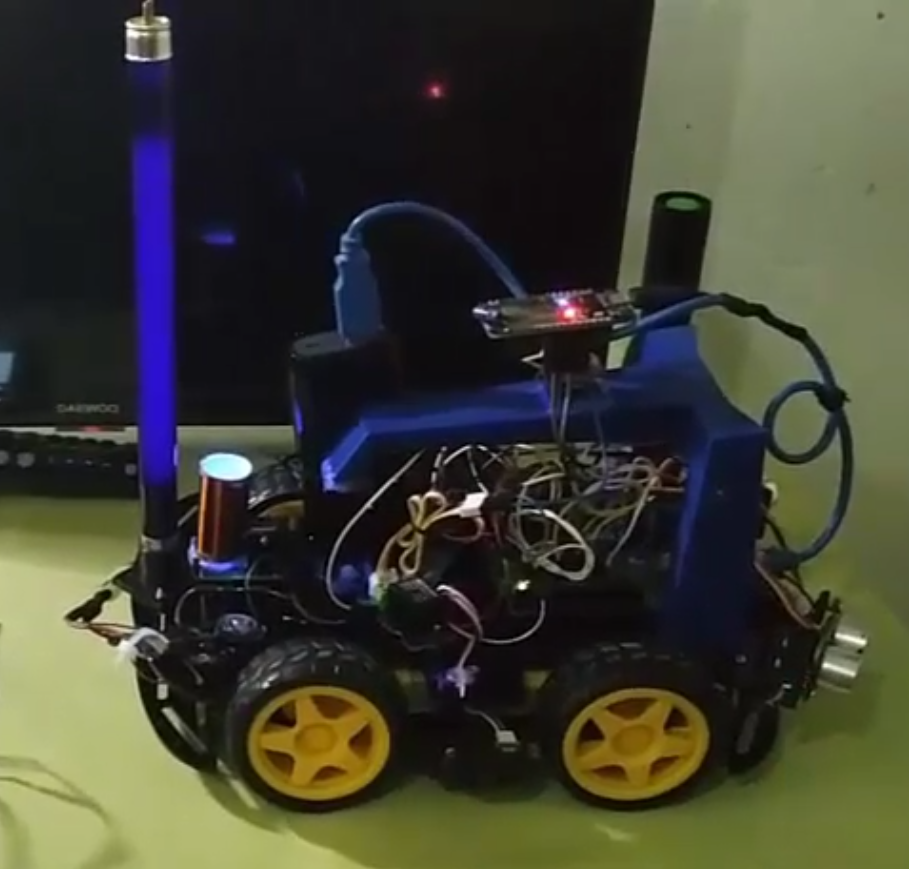
- Here I explain what a Tesla coil is, and what a UV lamp is. I also show you the schematic diagram and code of a UV meter with Arduino (optional).

- Finally, here I do tests with the prototype and make my performance conclusions. Also; I describe the difficulties and possible solutions.
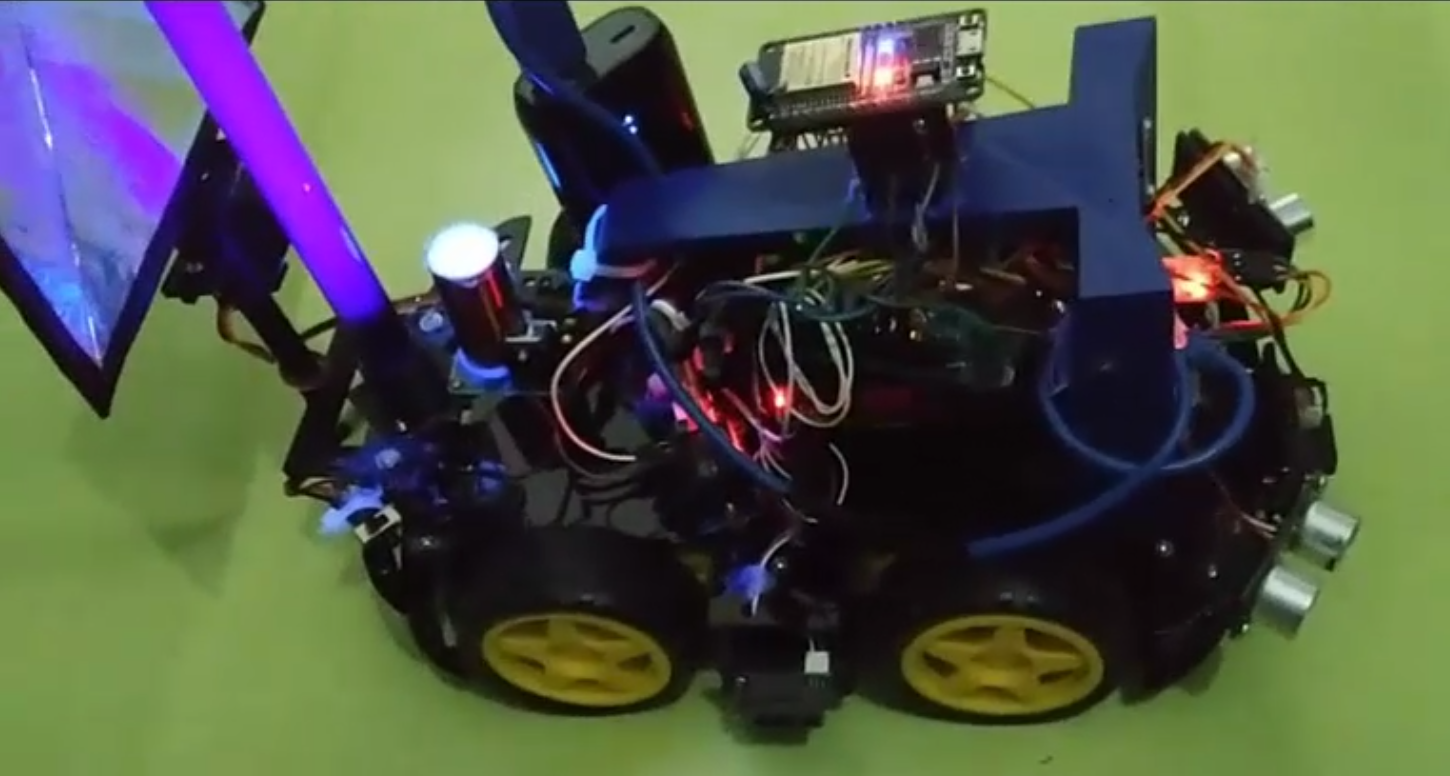
--> All Hardware and Software Updated: UV Reflector & OpenCV
- I've worked on a new version of my project and I will show you the progress of this one. Here I've added a reflector to concentrate the UV light, and object recognition through OpenCV and the camera of my Raspberry Pi. The robot is stopped and moves and aims the reflector on the desired object.
--> Challenges
- I'm satisfied, however there are still things to do, e.g.: add two or three UV lamps and add an upper platform to place the lamps, add more batteries, add more voice commands, add more object recognition, try TensorFlow, Machine Learning, etc.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.