 Daniel Resio
Daniel ResioThe previous version of scrappy had a computer, and stepper motors, but no interface between them. In fact, there wasn't even proper coupling between the wheels and the stepper motor (whoops). Both of these have been added with an Teensy 4.1 added to a board with 4 socketable motor drivers.
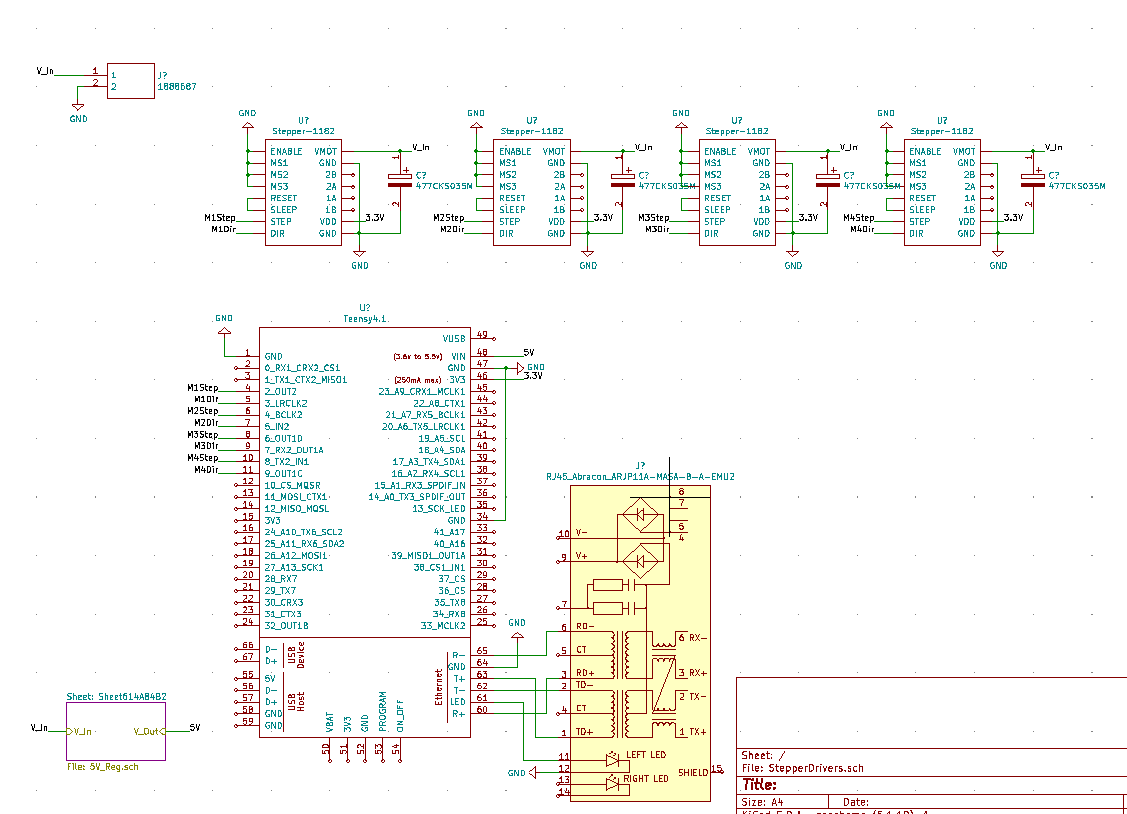
This picture is the rough schematic for how this will work. Again these files can be found on the scrappy github under KiCad. It will first start by using the built in micro USB to transfer data, but something I want to implement is connecting to ROS over the new ethernet capabilities the Teensy now has. Note connectors to the steppers has not been done yet, I am still looking into standards that hobby stepper motors have for these connectors.
Speaking of electronics design the previous voltage regulator board's footprint needs to be changed to have a lower profile. For now this circuitry uses the same 5V regulator as the computer supply, however I am currently looking at using a higher amperage regulator for the computer .
As for actual transmission of power, I have completed the gearing that are inside of the wheel mechanism. Here is an up close section view of that.
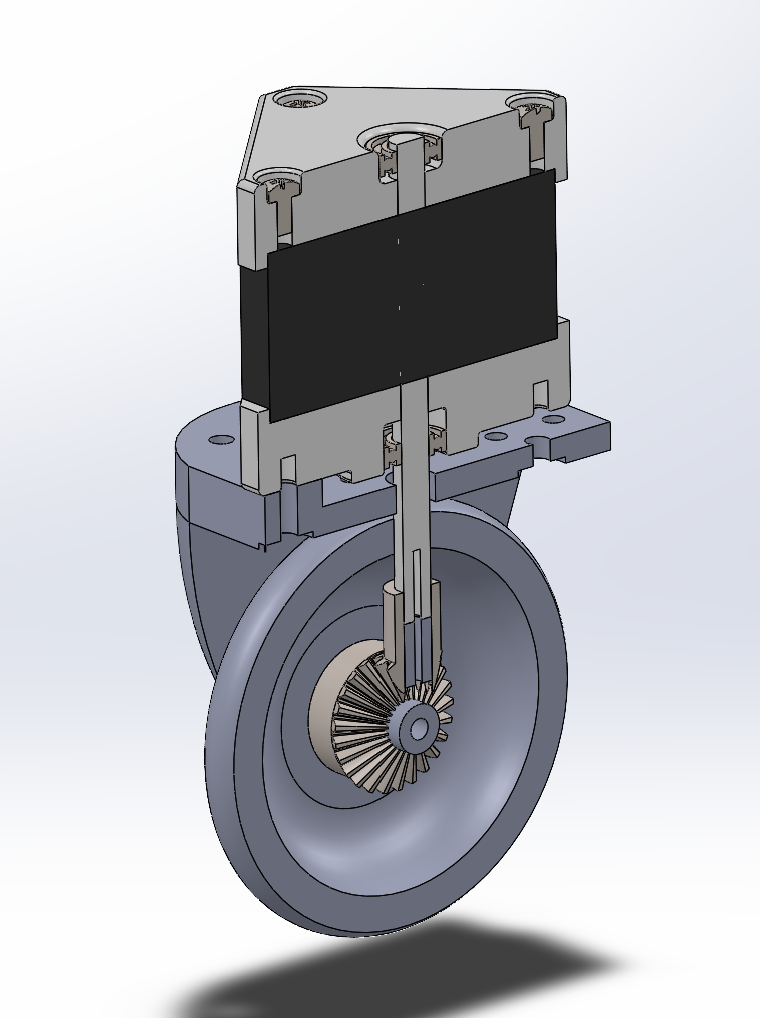
The gears for now will just be held on with set screws until I can figure out a more elegant way for this to be done.
As a note, the shell shape has been altered to reduce 3D printing time significantly and also provide more space for peripherals inside.
Thanks for reading!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.