 Victor Barahona
Victor BarahonaFeatures:
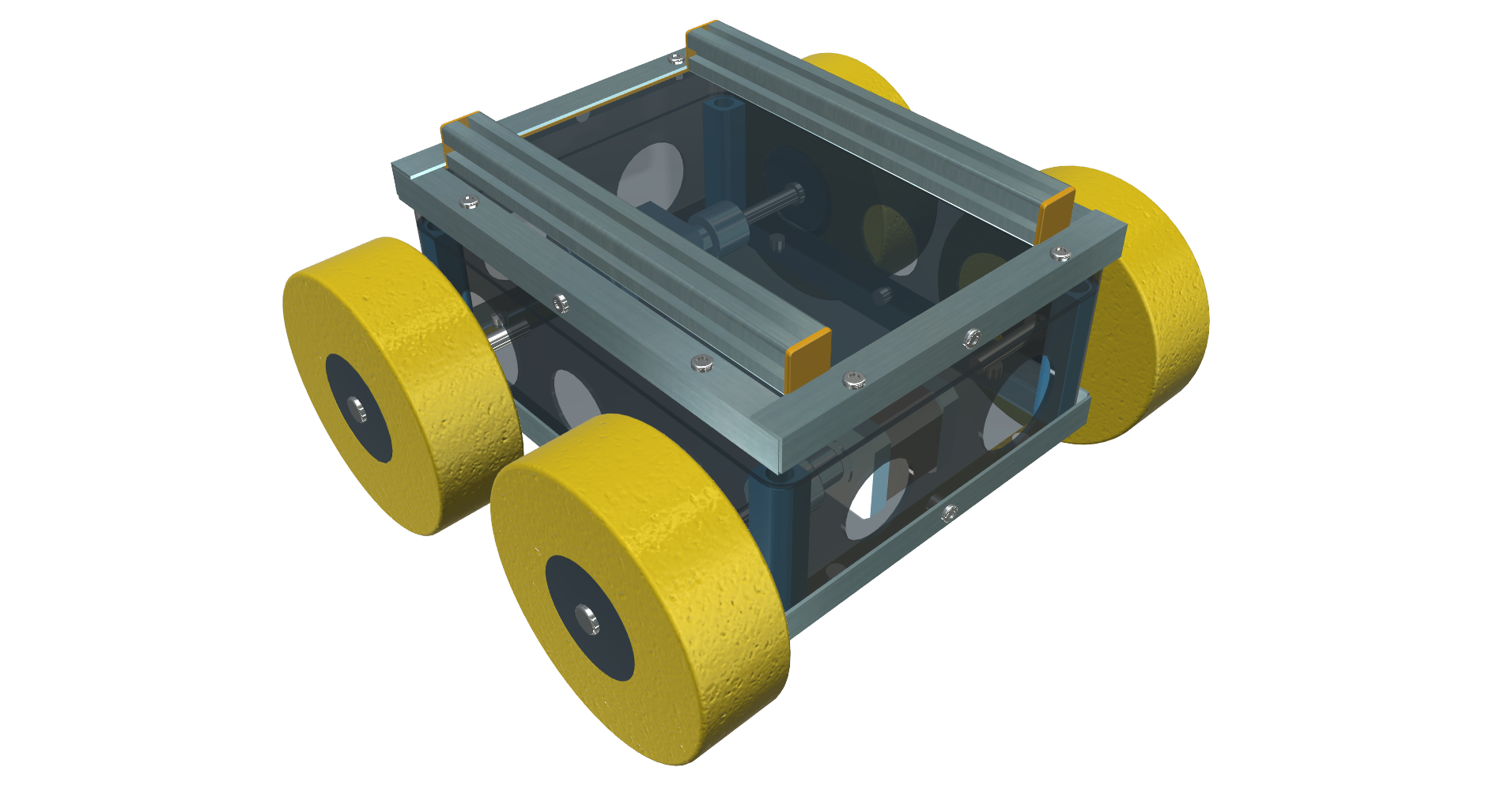
- 4 driving wheels
- H-bridge based on L298 to drive the engines
- Arduino Nano
- Ultrasonic sensor
- Powered by three 18650 batteries
- Old Smartphone without SIM connected to the Arduino through OTG cable tha provides power and "Intelligence".
For the control part I'm working with several options:
- OpenBot platform
- ESP32 Cam
- Platform based on Jetson Nano (coming soon)
At the moment I'm working with OpenBot. . Although I have a Jetson Nano I have preferred to save it for a larger project. It didn't fit well in the OpenBot chassis and I was going to have issues with heat dissipation as the printed parts are PLA and can warp.

OpenBot consists of a firmware installed on the Arduino Nano and an Android app installed on the smartphone that communicates with the Nano through the USB port. It uses the ** TensorFlow Lite ** framework to control the robot, which can be controlled from another smartphone in the hands of the user. It has packages installed to "navigate" autonomously avoiding objects that it detects through the mobile camera. There is another way that allows you to follow a person.
The system can be "trained" to do other things. So, this project helps me to experiment and evaluate other potentially interesting projects.
The ultimate goal would be the construction of a very robust UGV with a high capacity to move autonomously, which can transport some objects and accompany the user in the garden, make emergency calls in case of problems and other things.
Credits
Artzain-Bot is a concept created by Victor Barahona .
This project has been based on Martian rovers such as Curiosity and some UGV designs but mainly I love Leorover .
At this stage, the electronics and software have been adapted from the platform OpenBot
License GPL3.0
More info in my Github account (in spanish).

 AdityaPrakash23
AdityaPrakash23
 Shifty
Shifty
 ZaidPirwani
ZaidPirwani
 The Meiquer
The Meiquer