 K.O.
K.O.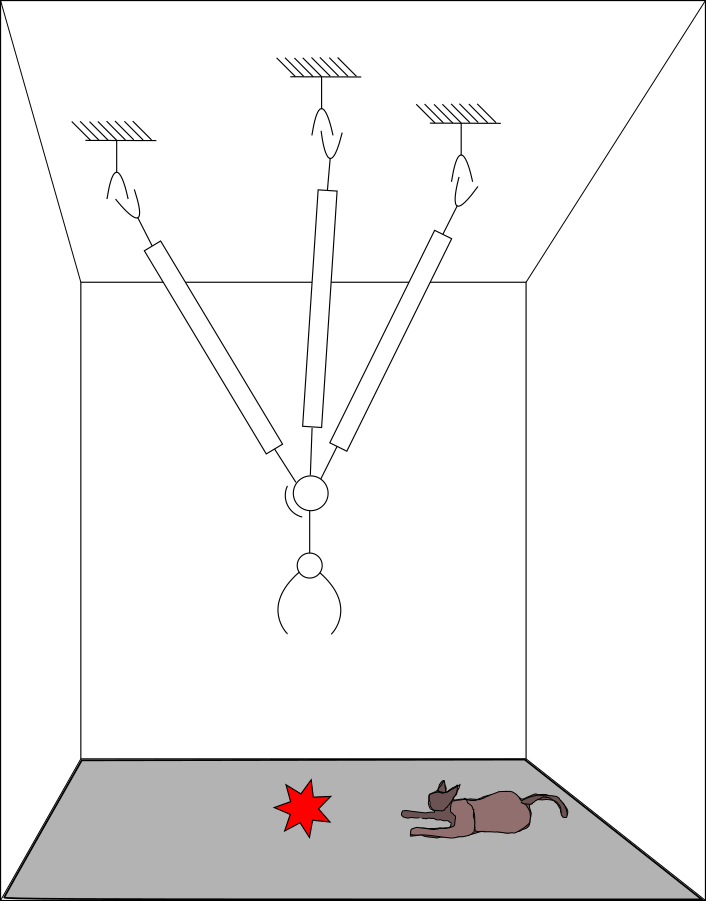
Three of the linear actuators mounted to a ceiling with universal joints can come together at a common spherical joint suspending an actuating claw. Small items dropped can be aided in their retrieval. Trusting pets can be engaged remotely.
A resilient strip (of tape measure fame) triad fed through centrally driven rollers extends a structure constrained by self spacing ribs
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
Three of the linear actuators mounted to a ceiling with universal joints can come together at a common spherical joint suspending an actuating claw. Small items dropped can be aided in their retrieval. Trusting pets can be engaged remotely.
deploy_boom_v3.stlSTL of all the 3d printed parts needed to produce the functional demo. CC BY-SAStandard Tesselated Geometry - 35.61 MB - 09/27/2021 at 06:33 |
|


Very interesting idea... Is there a video of it moving? How much load can it lift?

Bi-directional force, last I measured it, is ~1.6 kg (as shown in test stand) with limit imposed by slipping friction drive (my guess is about 10% efficient, co-botingly soft). There is plenty of design overhead to push coupling efficiency. Speed is currently limited by stepper/driver (~500 rpm -> ~22 mm/s linear travel) chosen for ease of mounting and to assess slip. My design goals going forward will orient towards arbitrary motor input/mounting, parametric tape selection and associated spool management all while maintaining that low cost heading.
Will add video after DC motor integration to compel with speeeeeed!
That's surprisingly good. Cool!
If you are going to DC... are you including a position sensor? I did some interesting work with a "string" sensor where I used a string wrapped around a shaft with an AMS non-contact magnetic sensor facing. I could get sub micron measurement with the 4K CPR version. It strikes me that you could add one of those to one of the rollers.
My DC motor tests will be to look at wear and speed limits so I am not yet set on closing a position loop. Perhaps others (you? hint hint?) might have more to add on this front than I!
Hi, really glad to see this. I had a play with these tape measures for a linear actuator too. I was using velcro/hook and loop to keep them together, as the roller action at the base was good at separating velcro and it was good in the straight sections at keeping the metal strips fairly rigid.