 New Dexterity
New Dexterity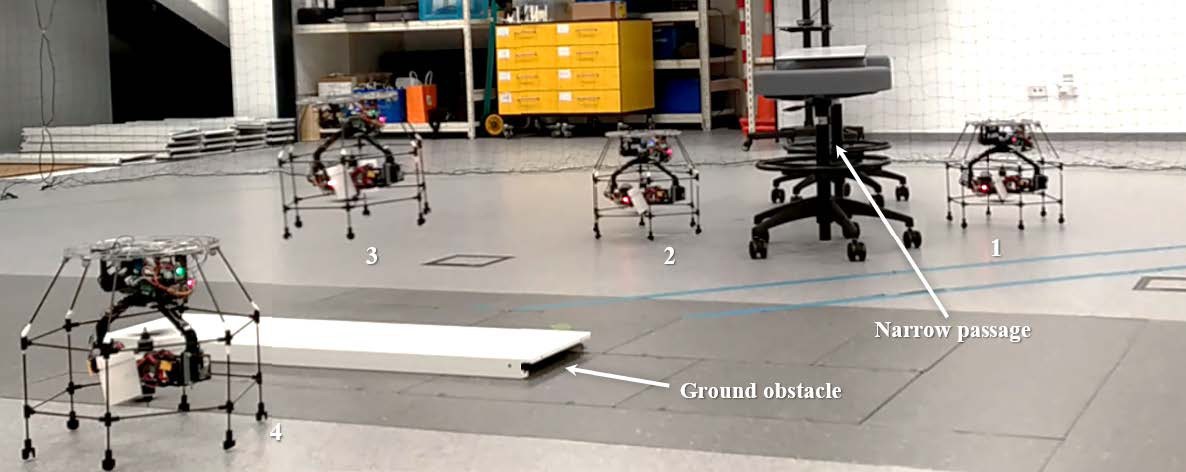
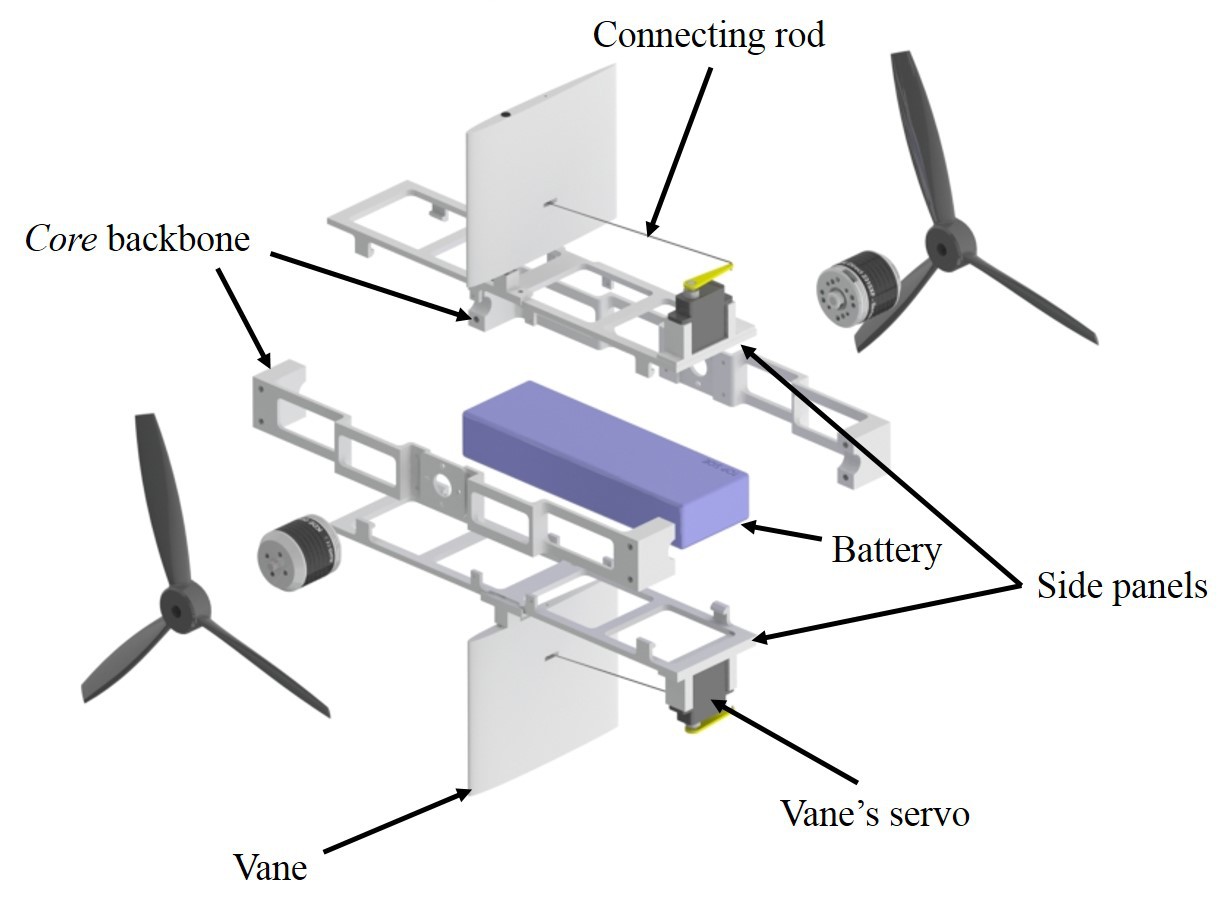
Micro Aerial Vehicles (MAV) with Vertical Takeoff and Landing (VTOL) capabilities, such as quadrotors, have offered significant value to many research fields and markets. However, only recently, MAV began to be explored as systems capable of interacting with the environment, performing manipulation tasks, and participating in more versatility-demanding operations. Pursuing the goal of turning flying machines into more versatile instruments, many researchers have resorted to using tilting rotor mechanisms to create new aerial vehicle concepts. Nevertheless, most such new concepts are bulky and lack the required versatility, and are restricted to particular applications. In this work, we address these issues by proposing a novel coaxial, versatile, modular tilt-rotor, all-terrain vehicle concept.
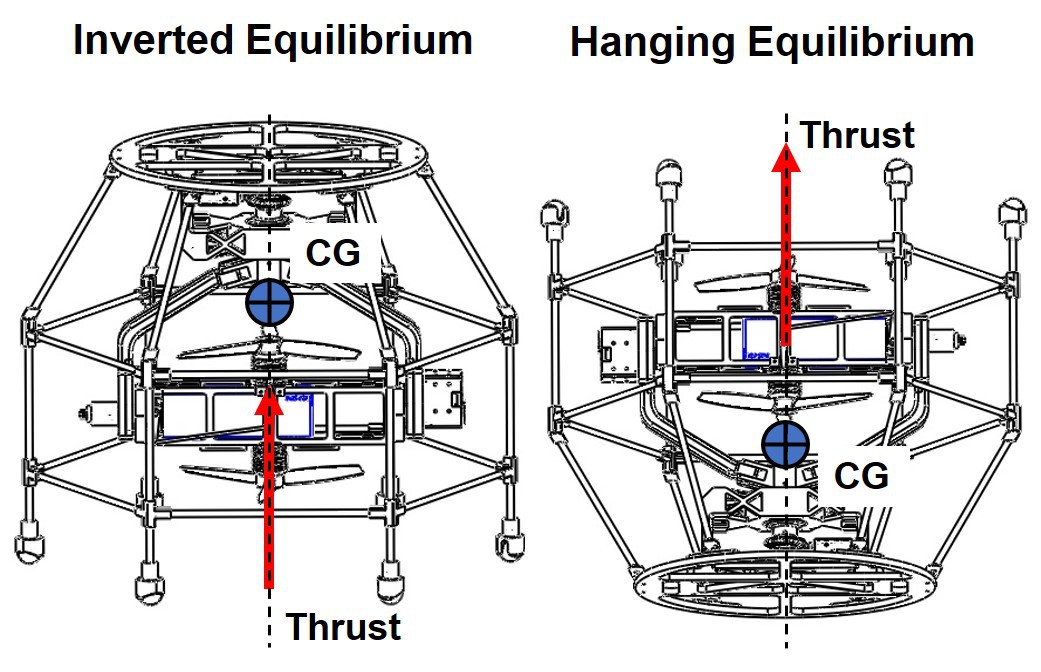
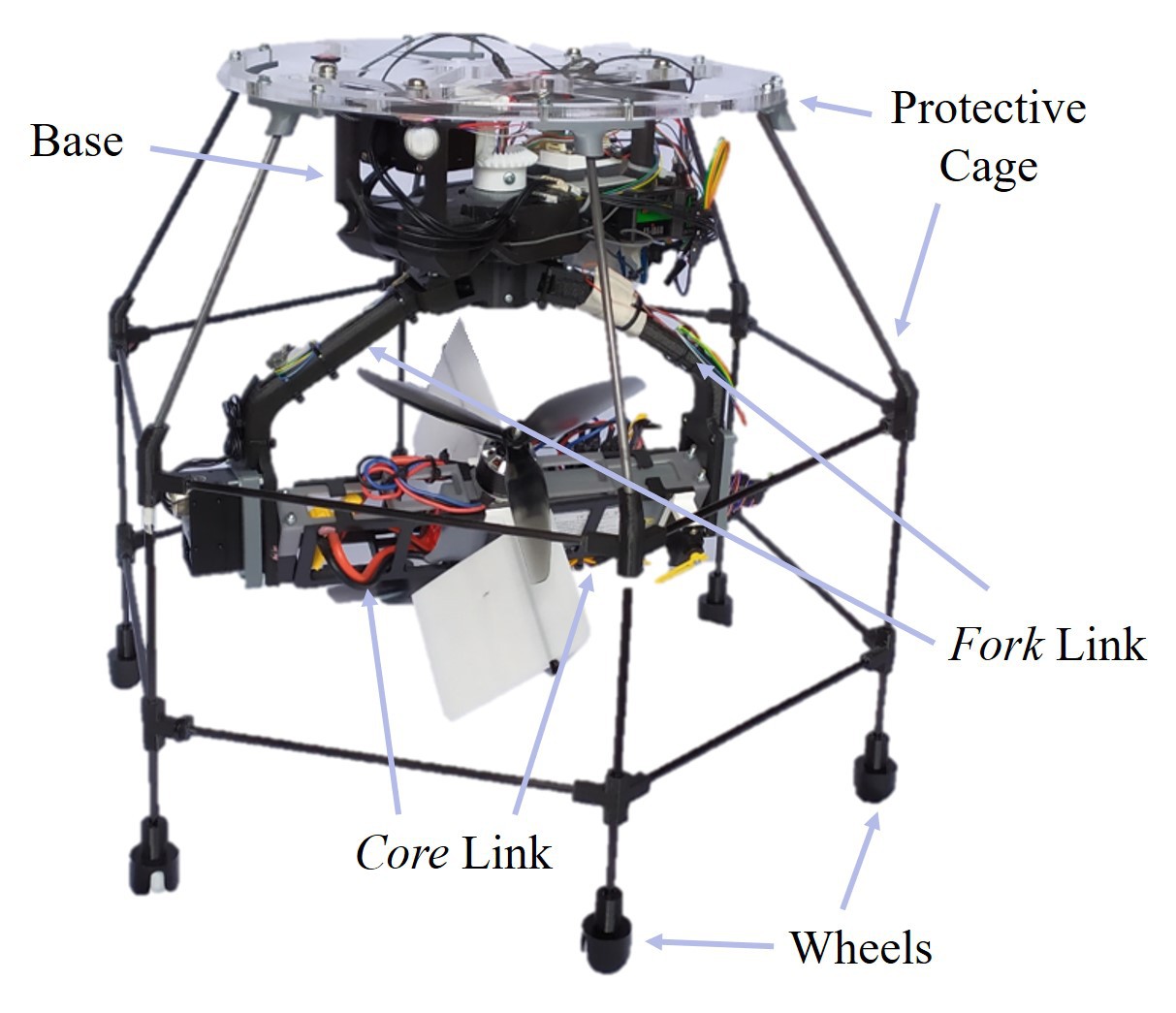
The OmniRotor platform can apply its full thrust in any direction, regardless of the frame's orientation where it is mounted. The platform does not have any limitations regarding rotation's range. It can change its thrust direction continuously without needing to unwind back to a specific configuration. With the addition of control surfaces between the coaxial rotors, the OmniRotor is turned into a functional VTOL MAV with hovering capabilities that can be used as a ground vehicle, a UAV, and an all-terrain vehicle.
The OmniRotor can be used for search and rescue, environmental monitoring, infrastructure inspection, and aerial manipulation applications.





 ken.do
ken.do
Amazing project! What flight control firmware are you using? PX4, Ardupilot?