 3drobert
3drobert

http://www.valvias.com/prontuario-rosca-metrica-din-13.php?m=11
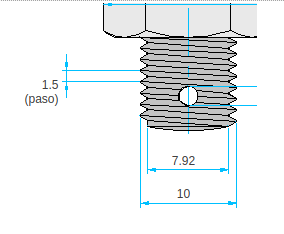
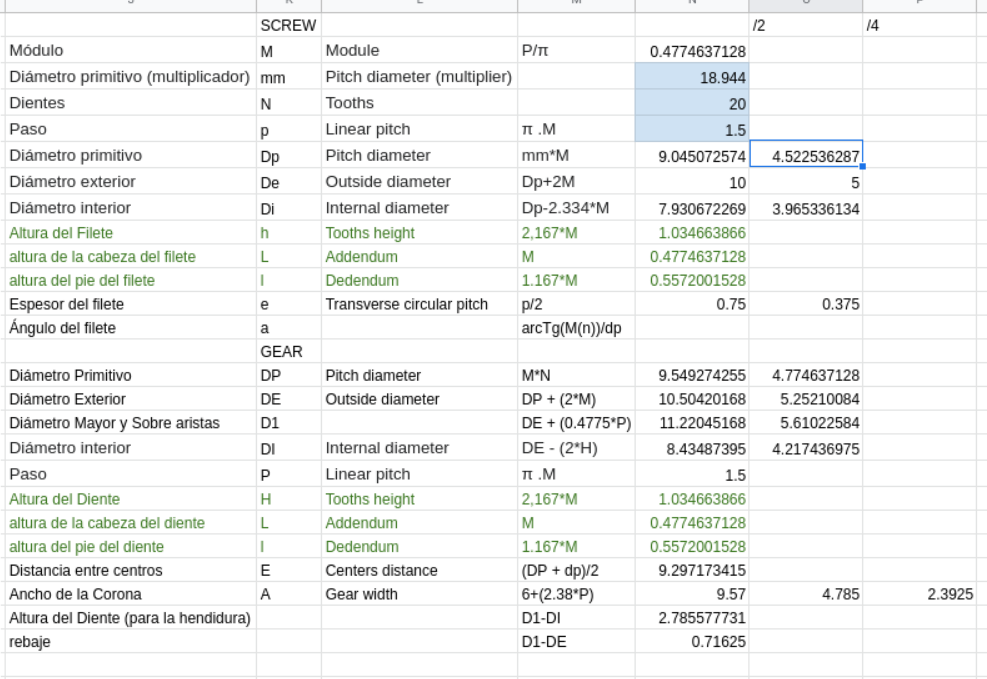
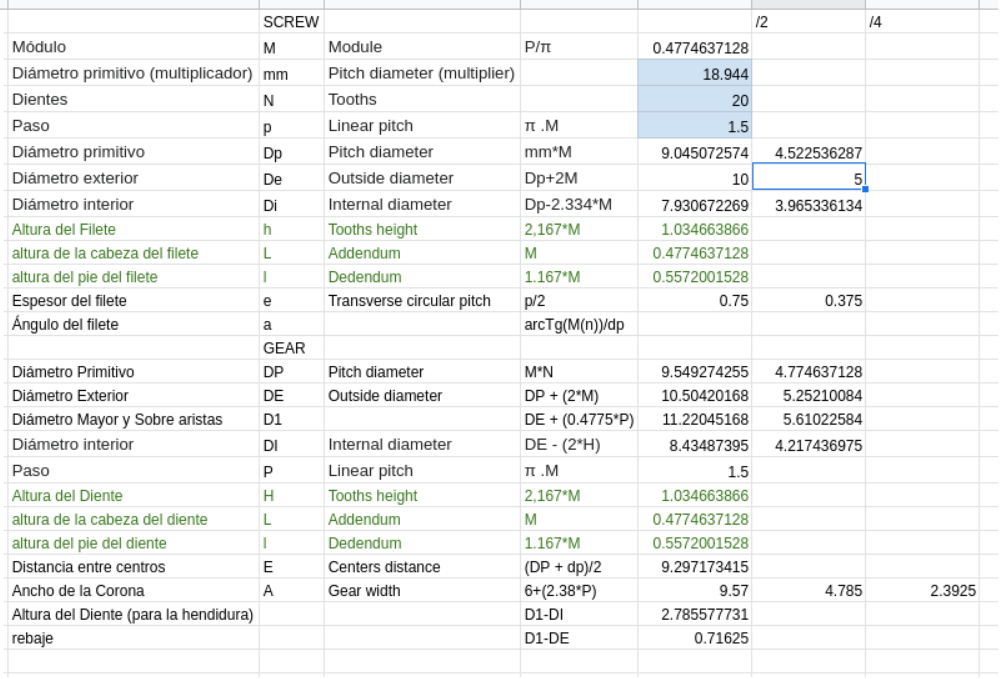
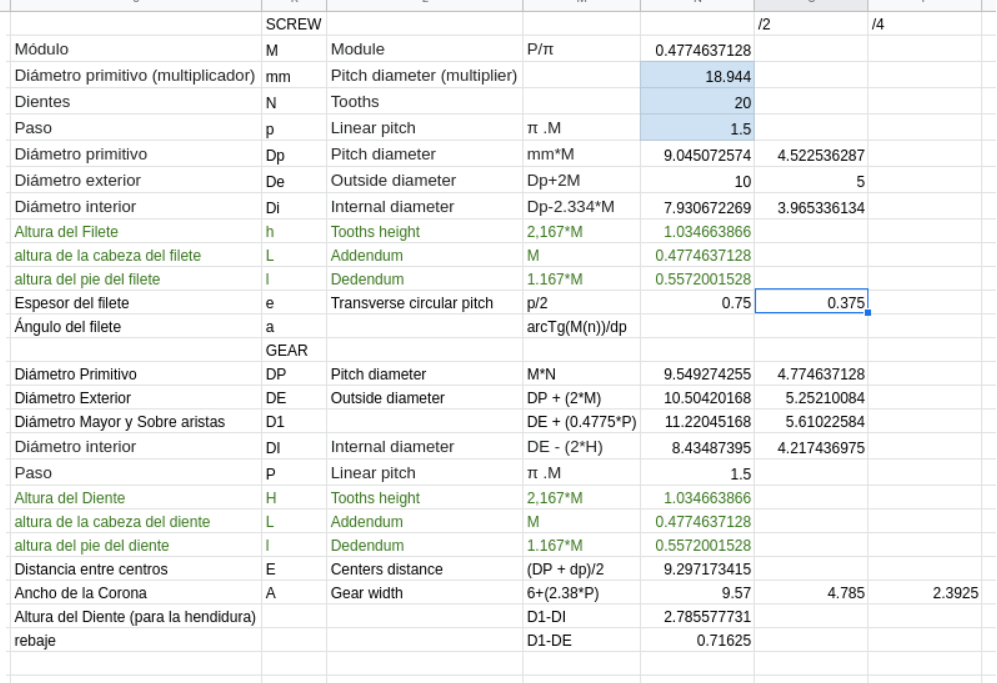
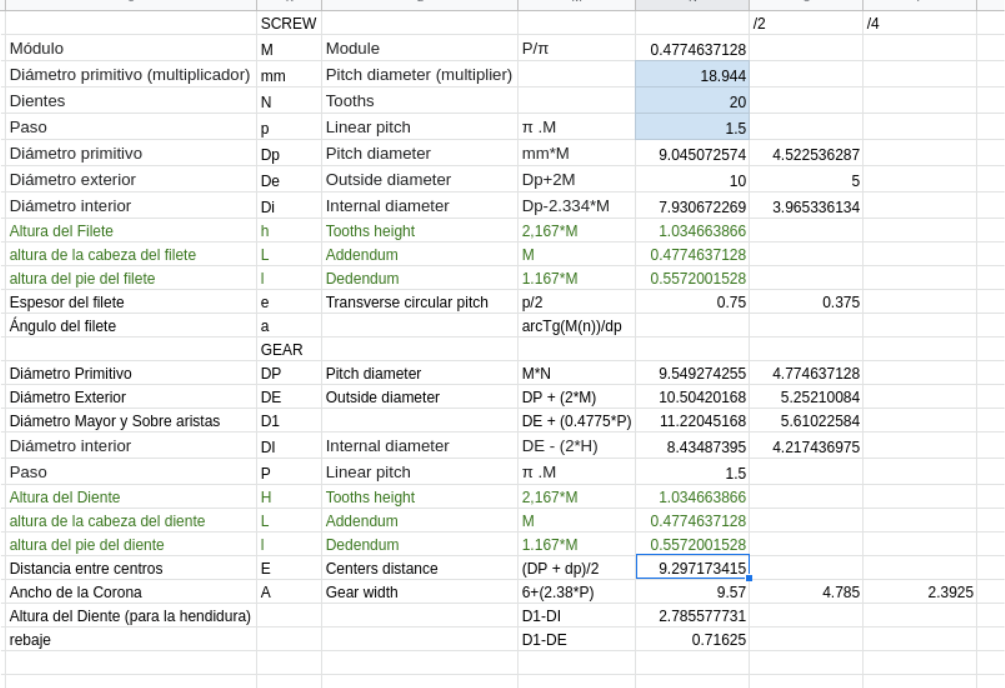
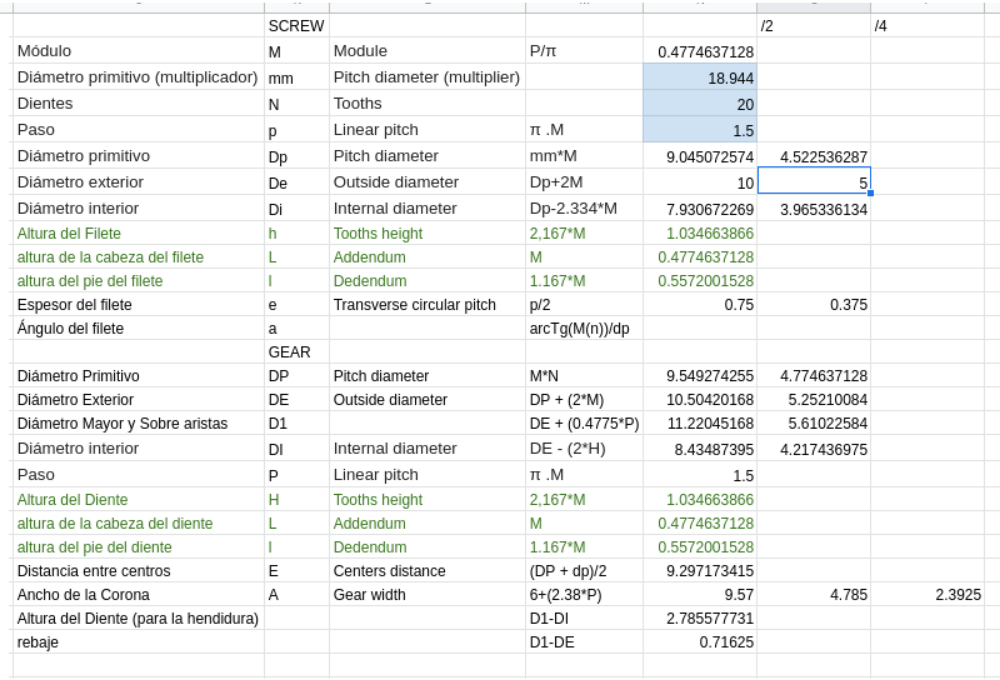
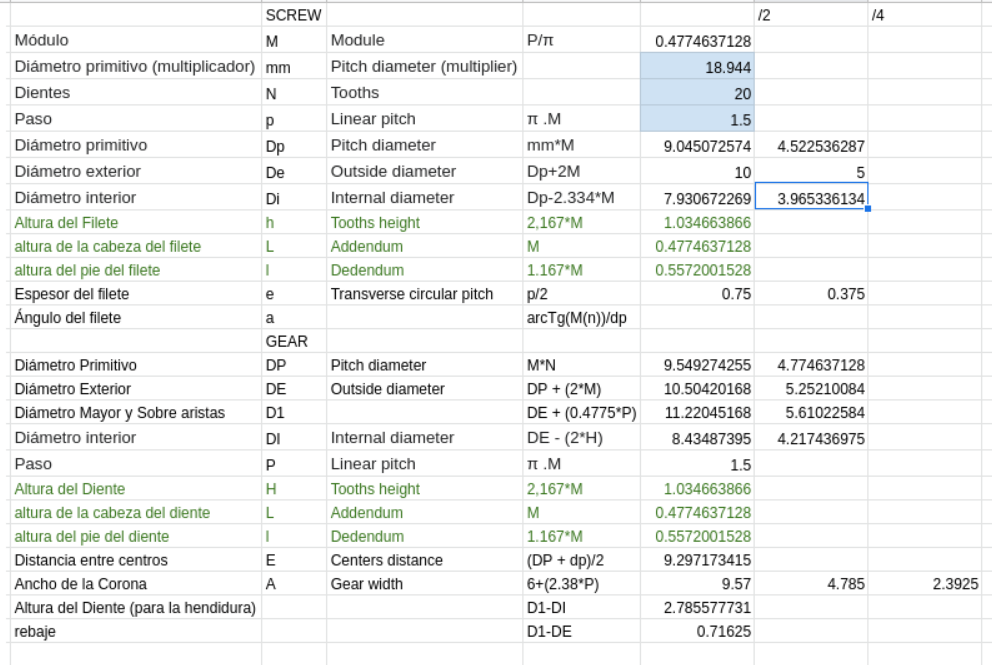
Linear pitch: 1.5mm
Tooths: 20
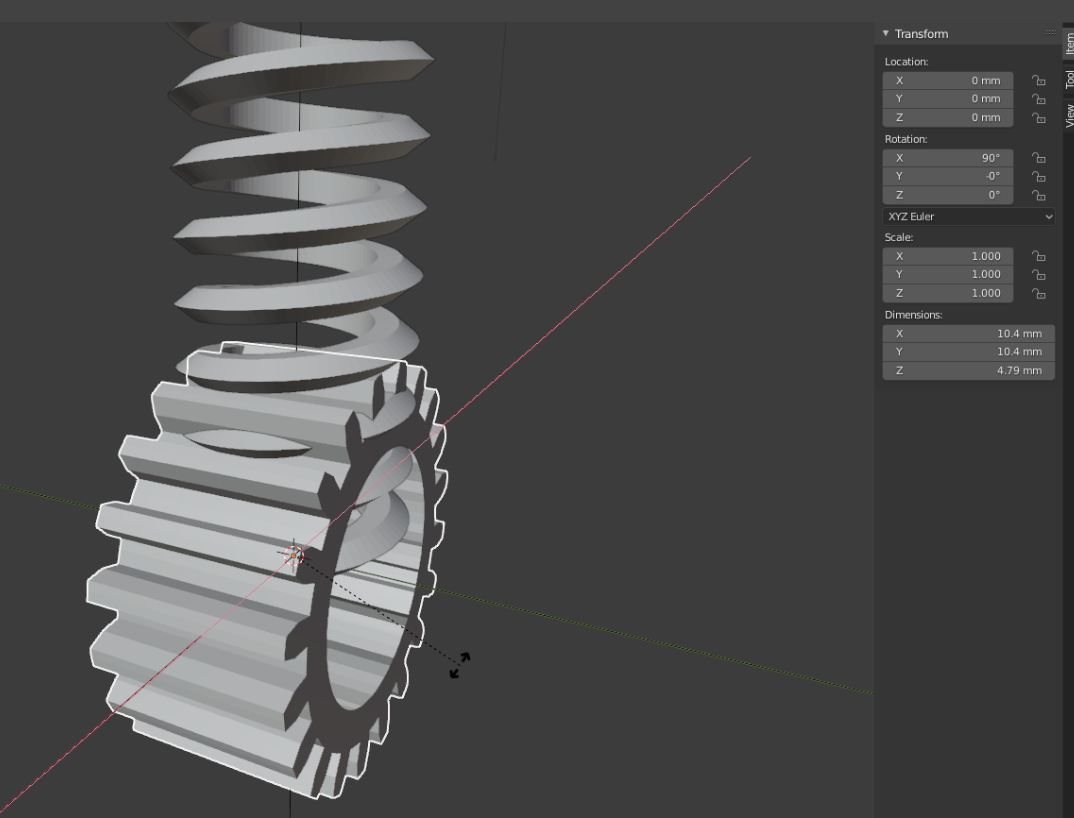
Adapt Pitch diameter multiplier to get Outside diameter (10mm)


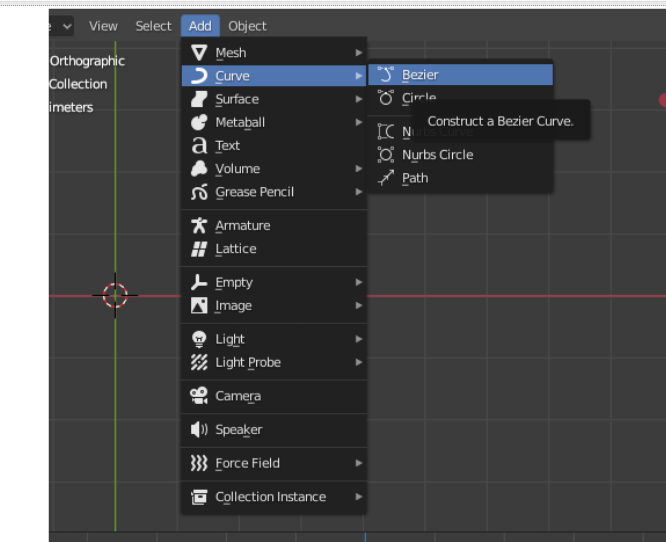
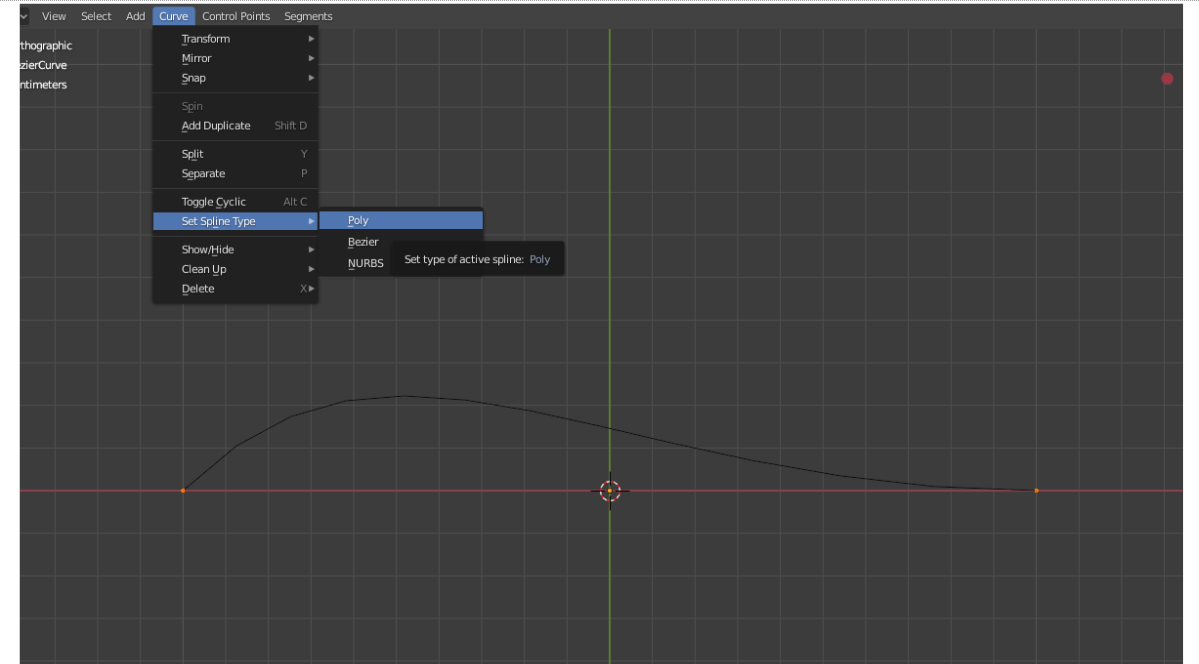
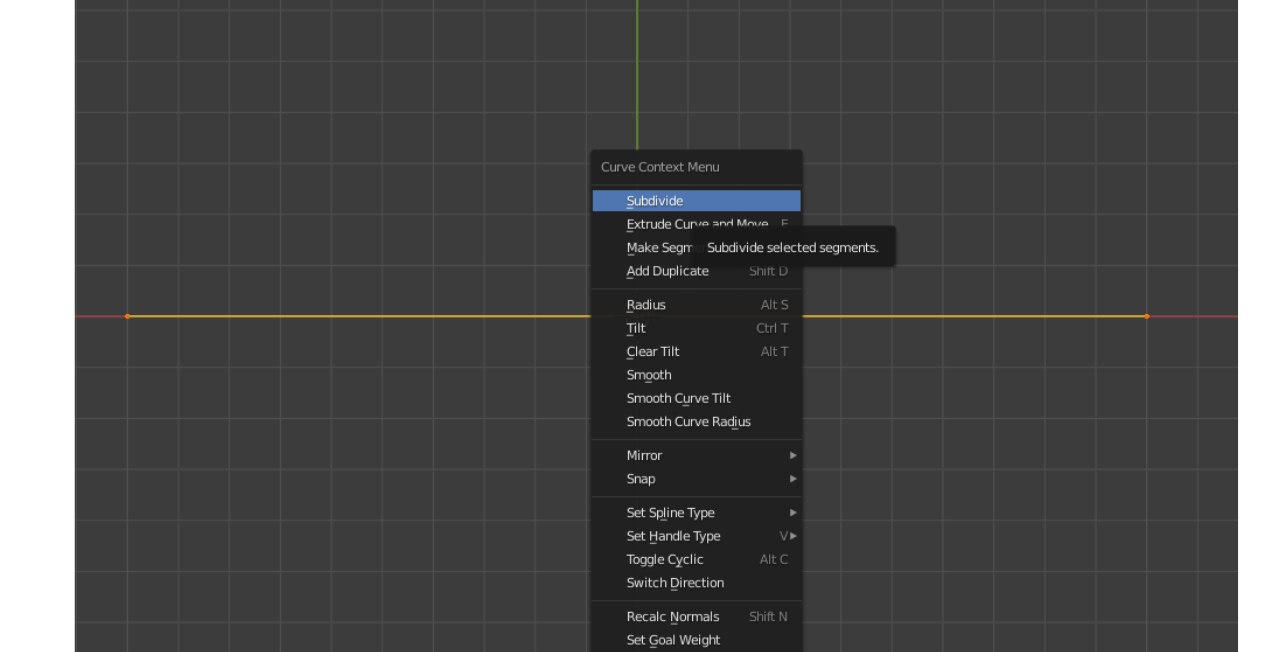
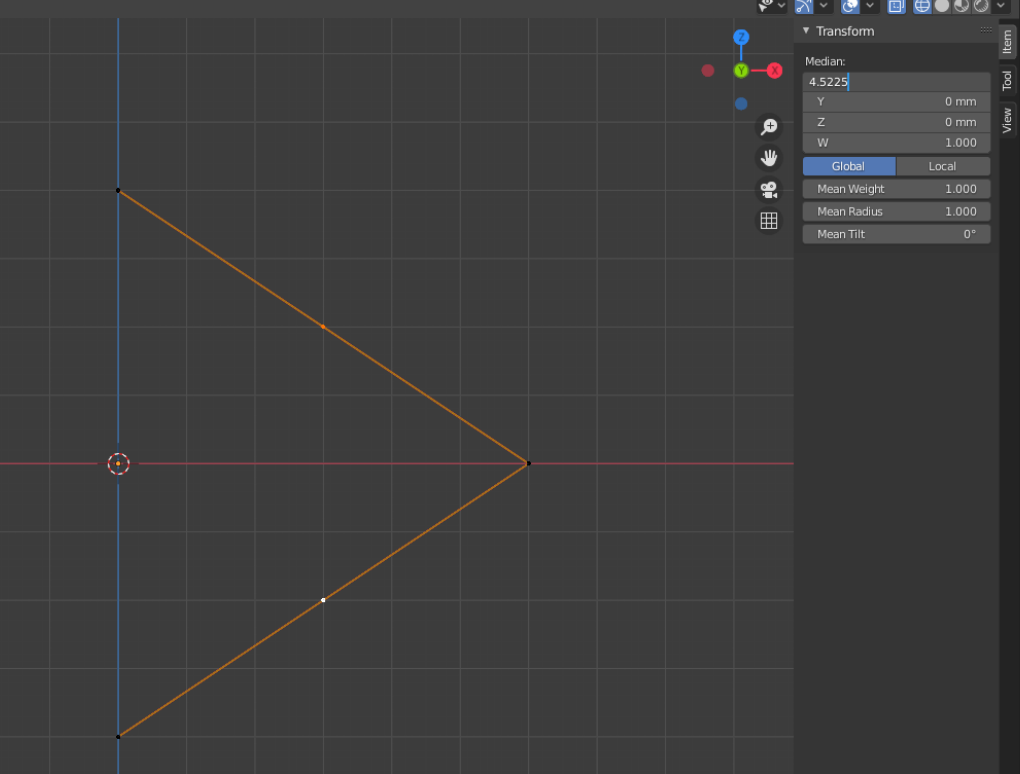
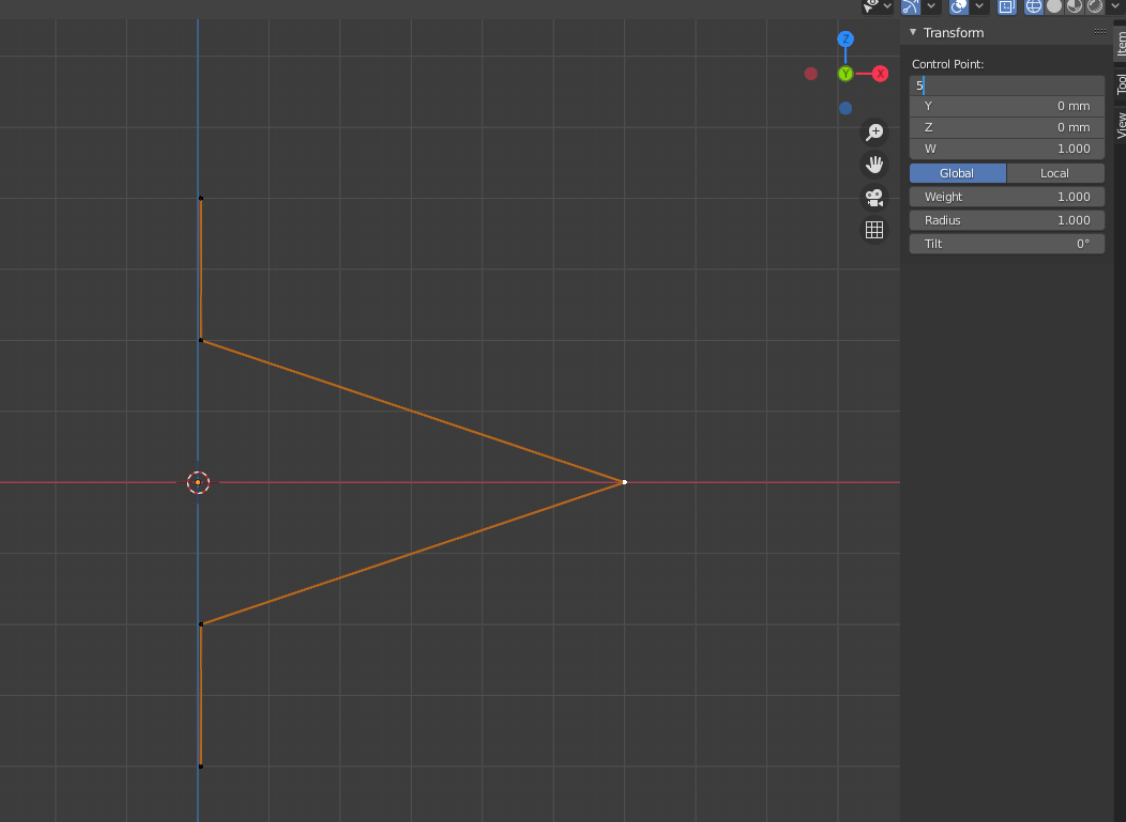
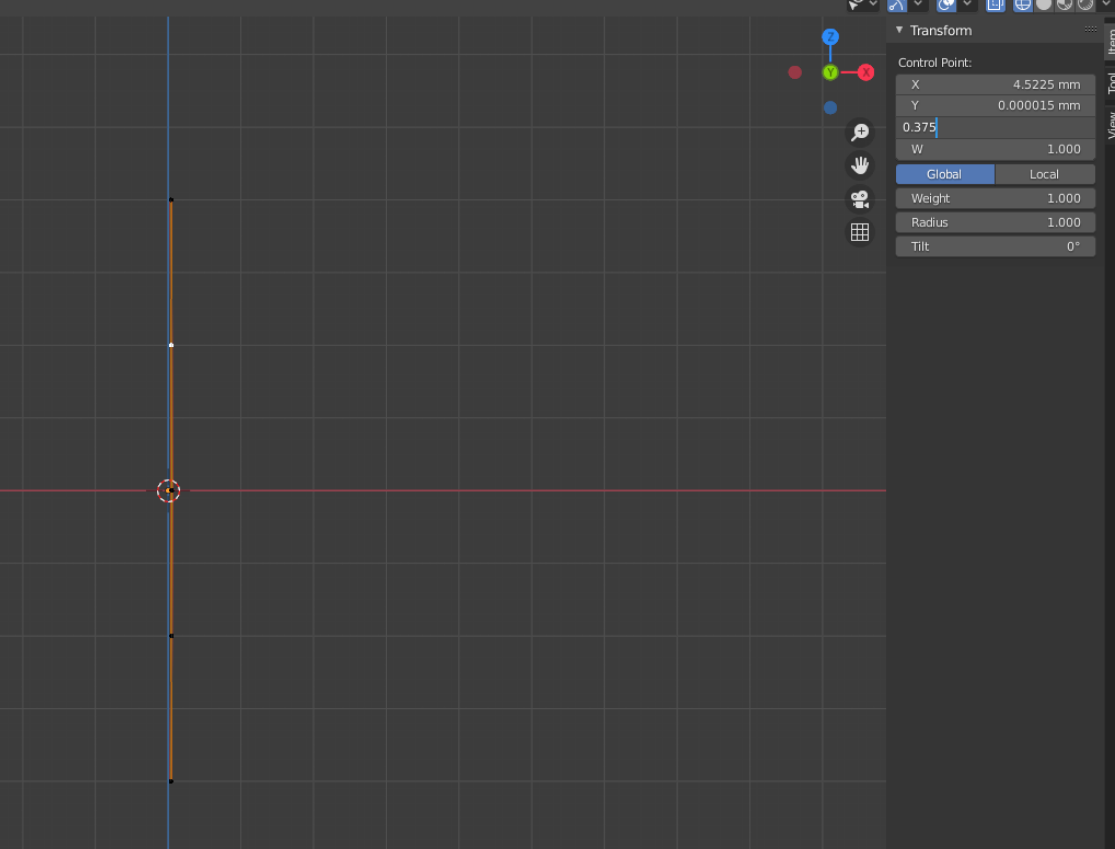
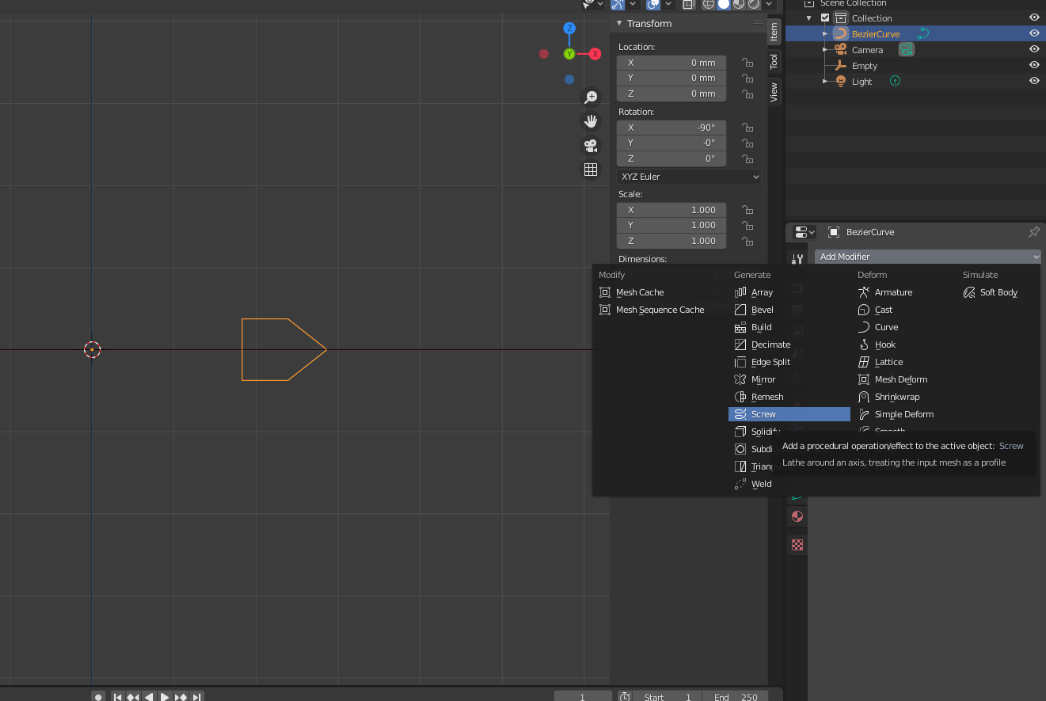
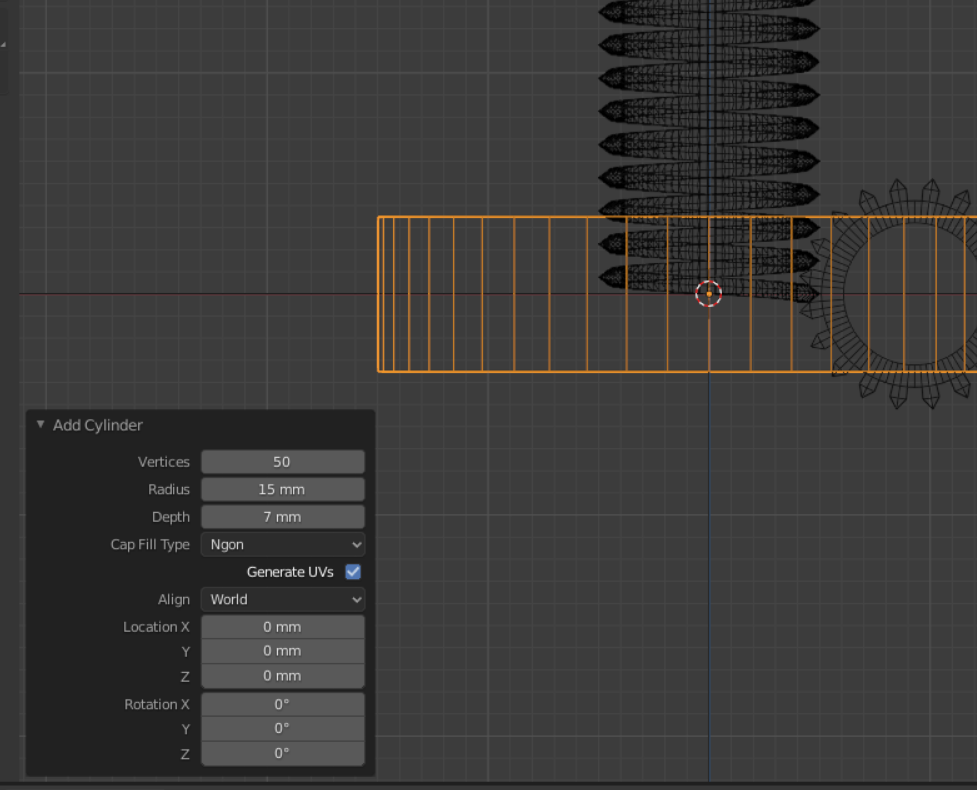
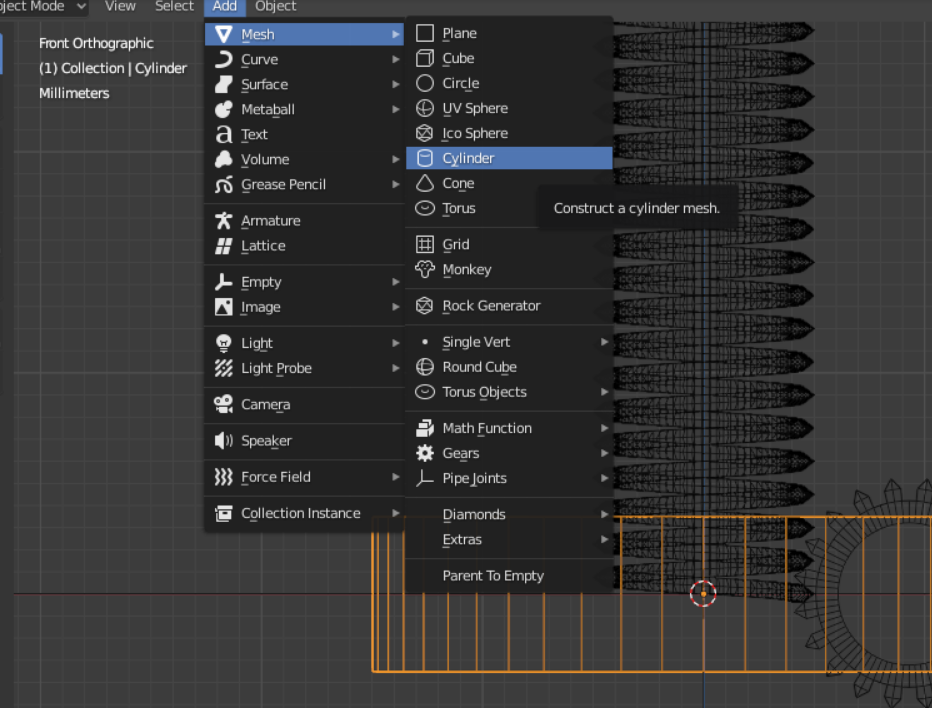
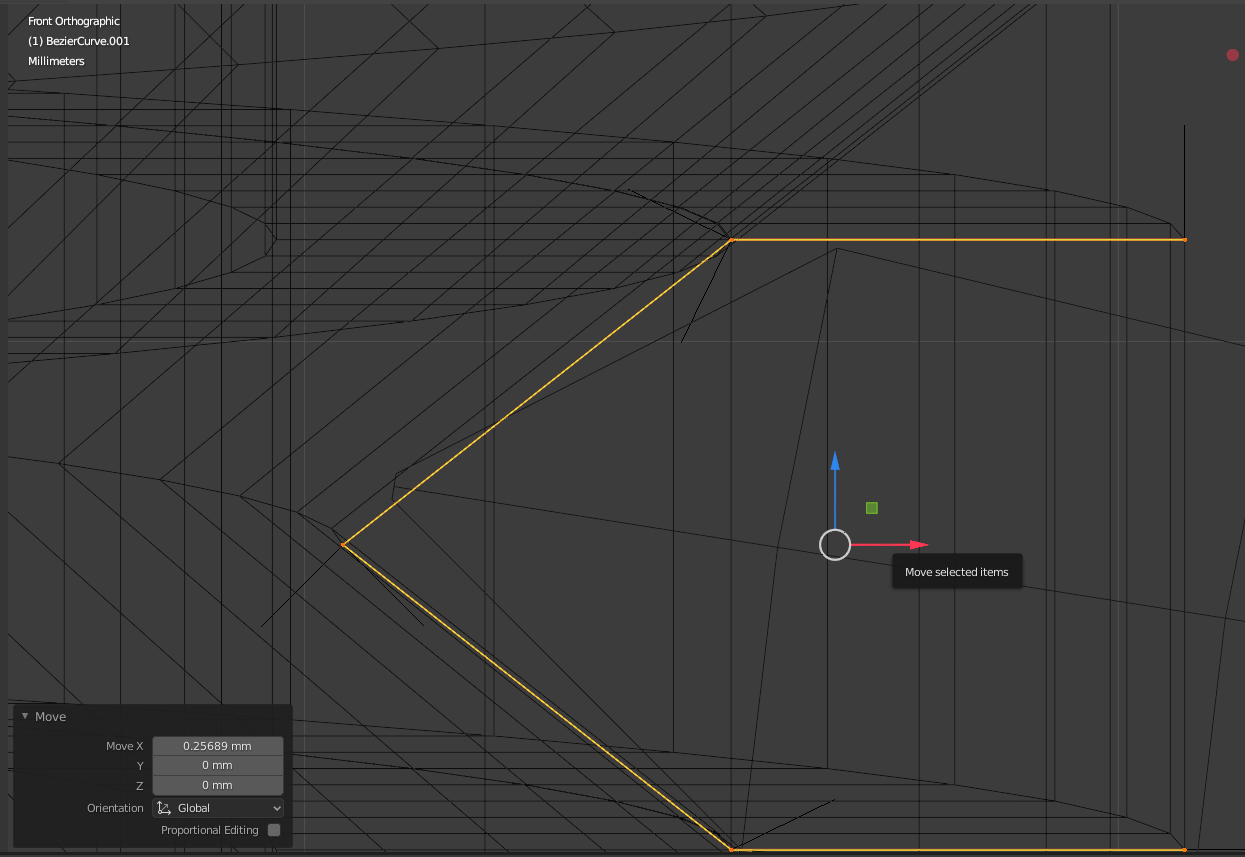
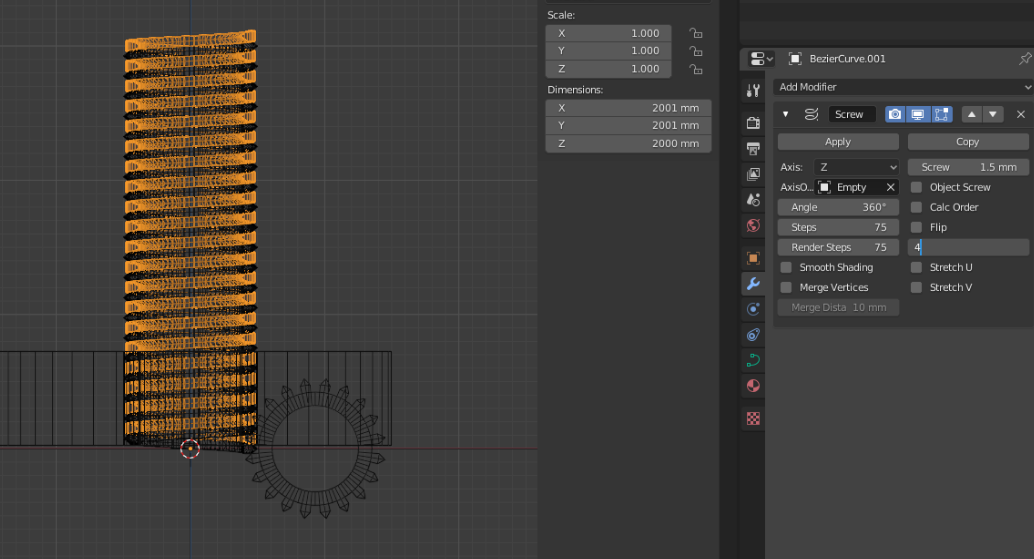
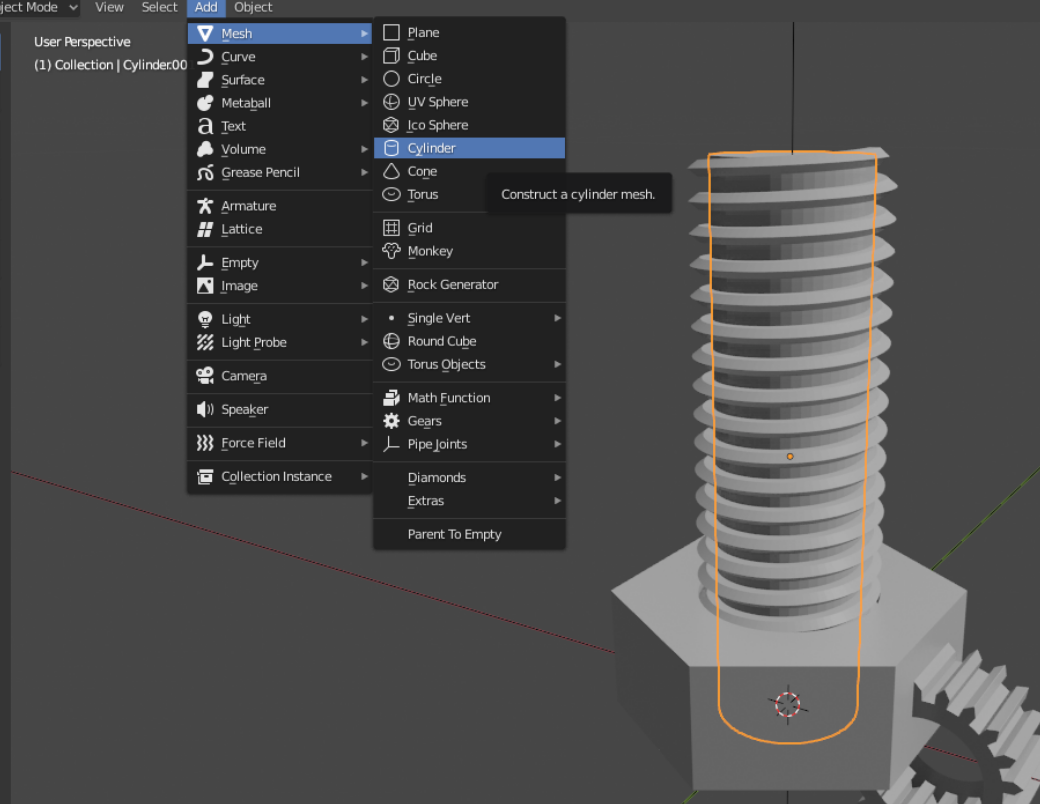
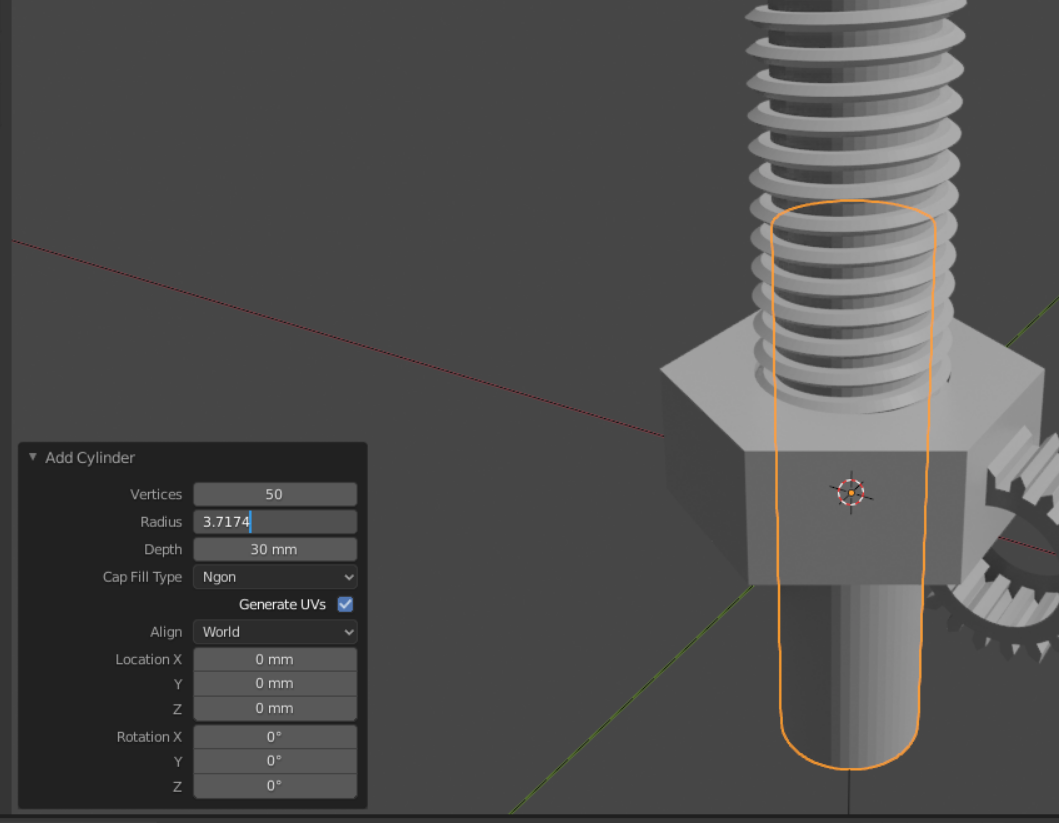
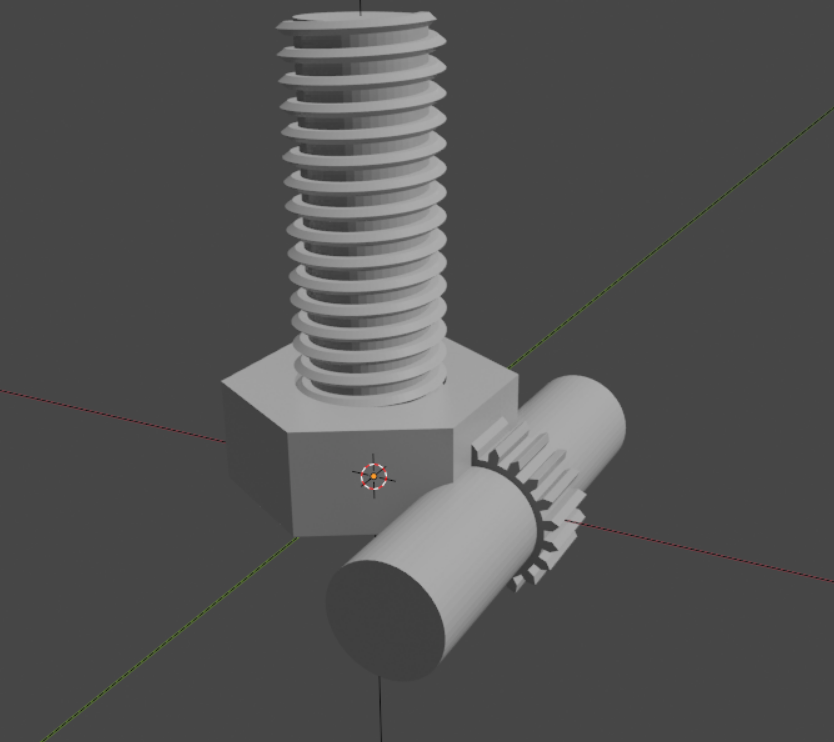
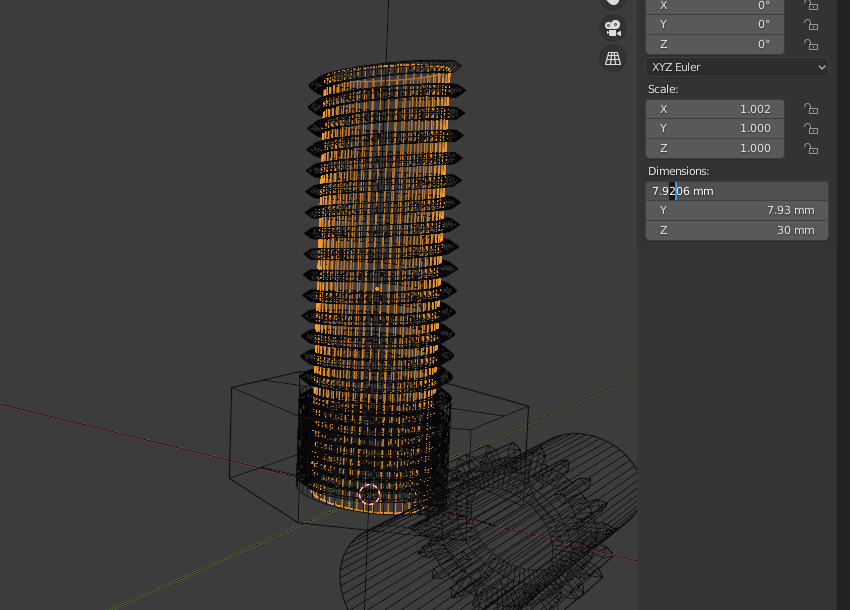
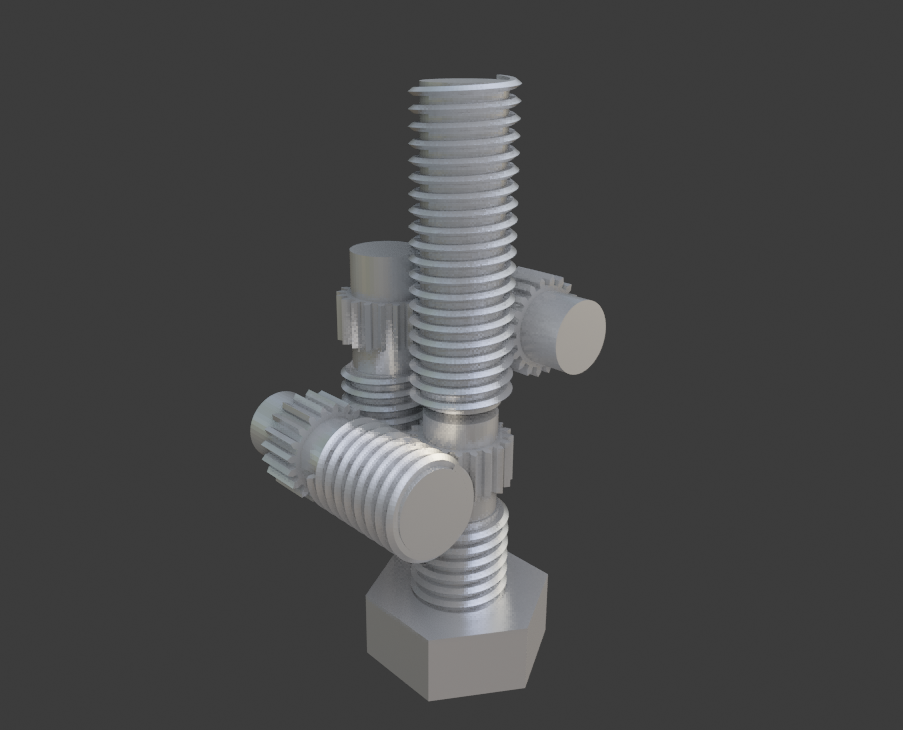
Creating the screw




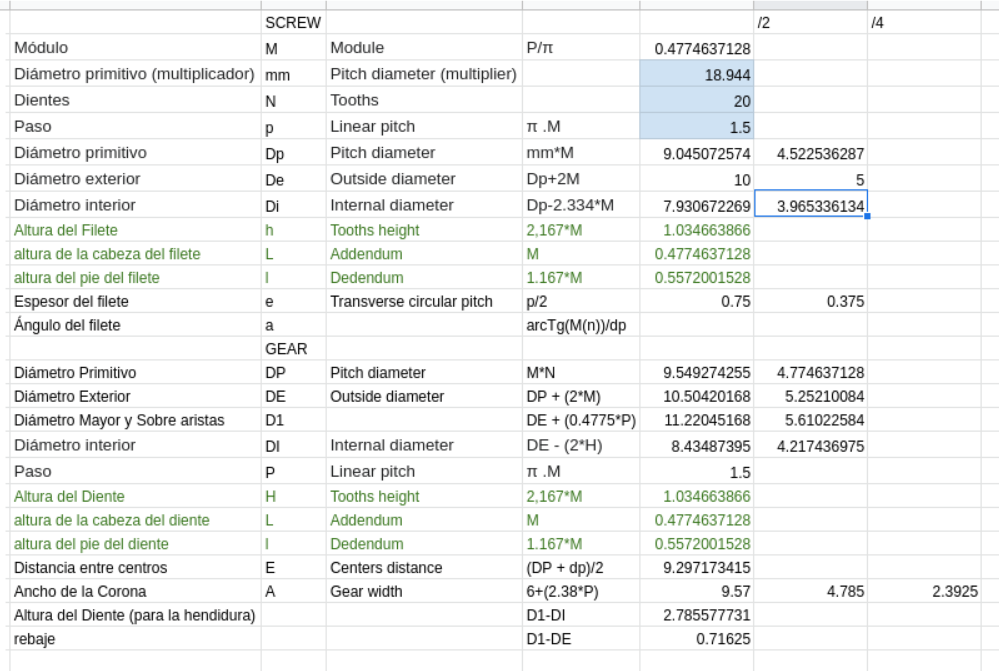
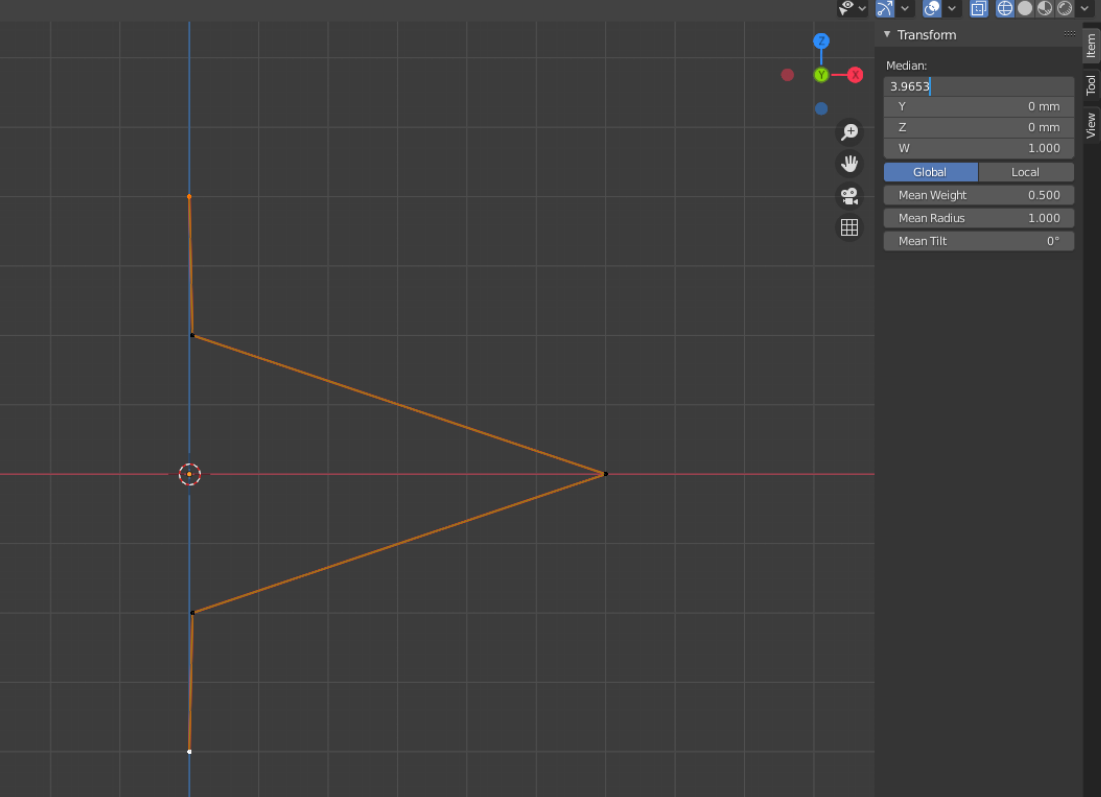




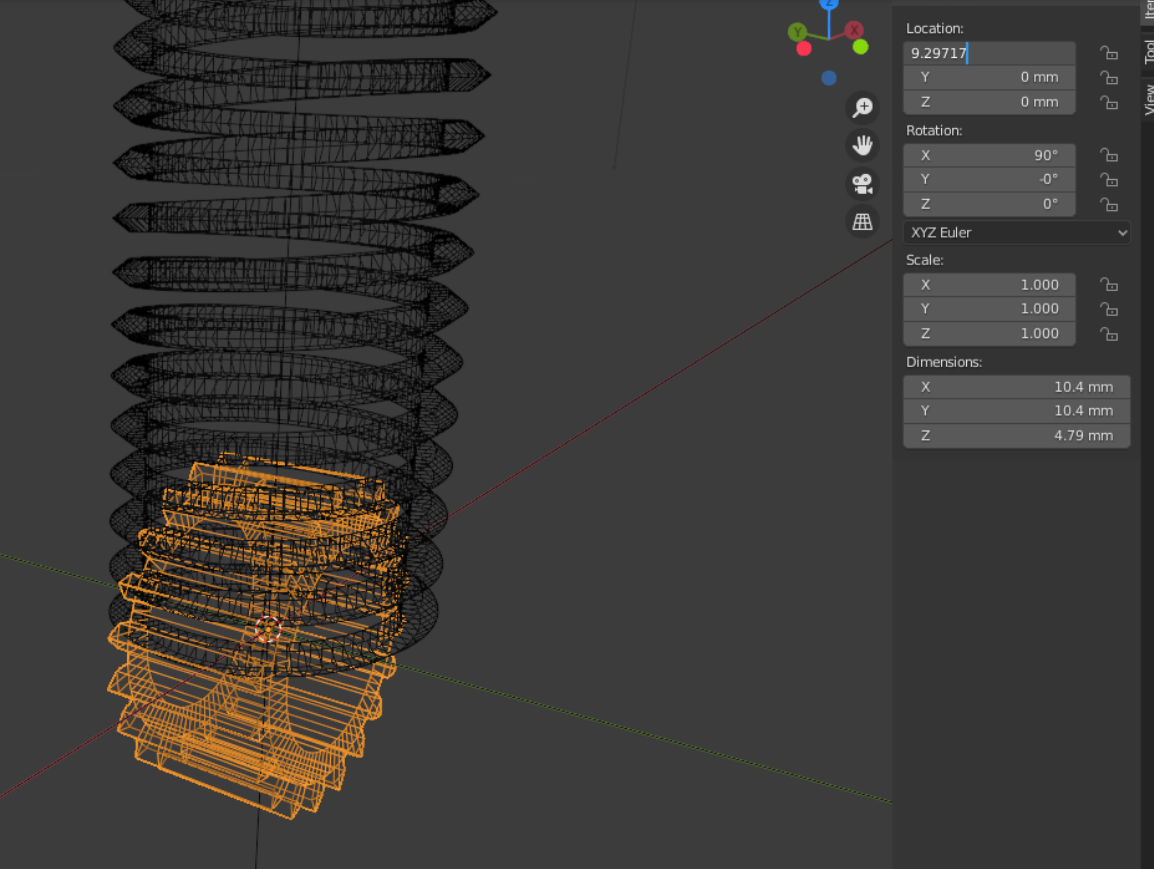
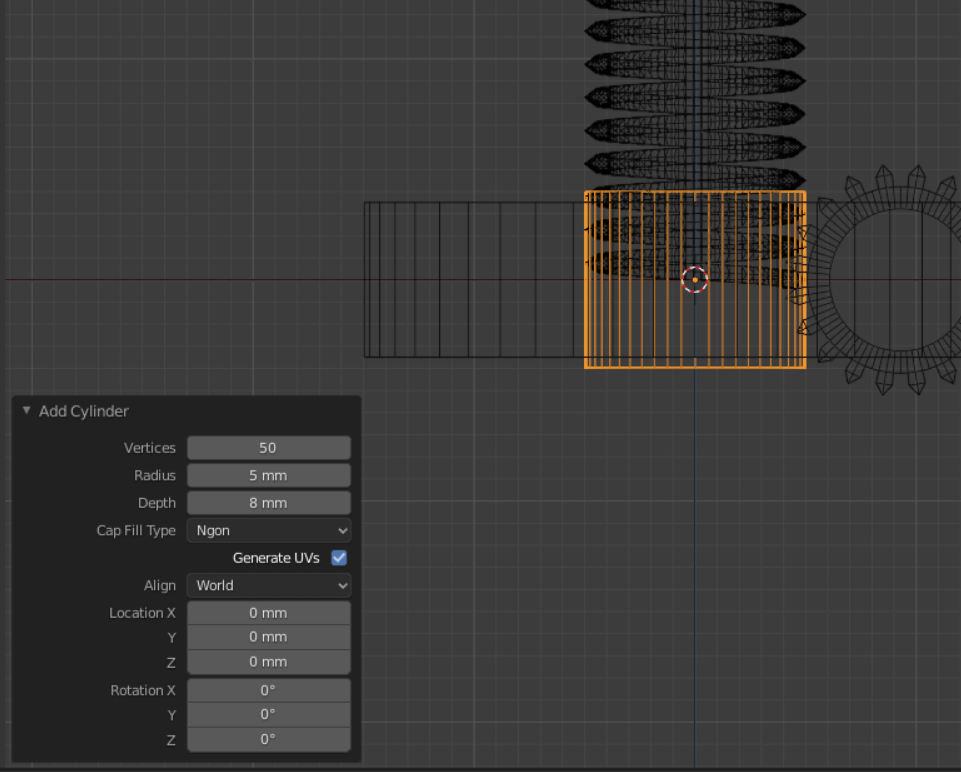
Creating the gear



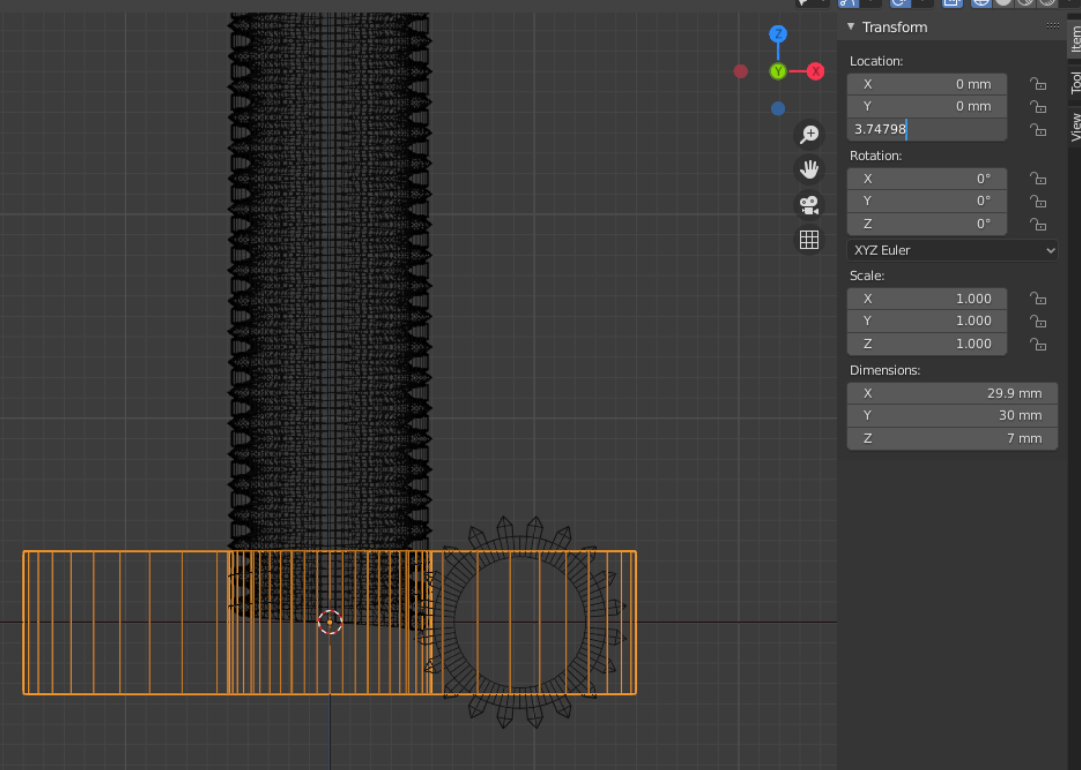
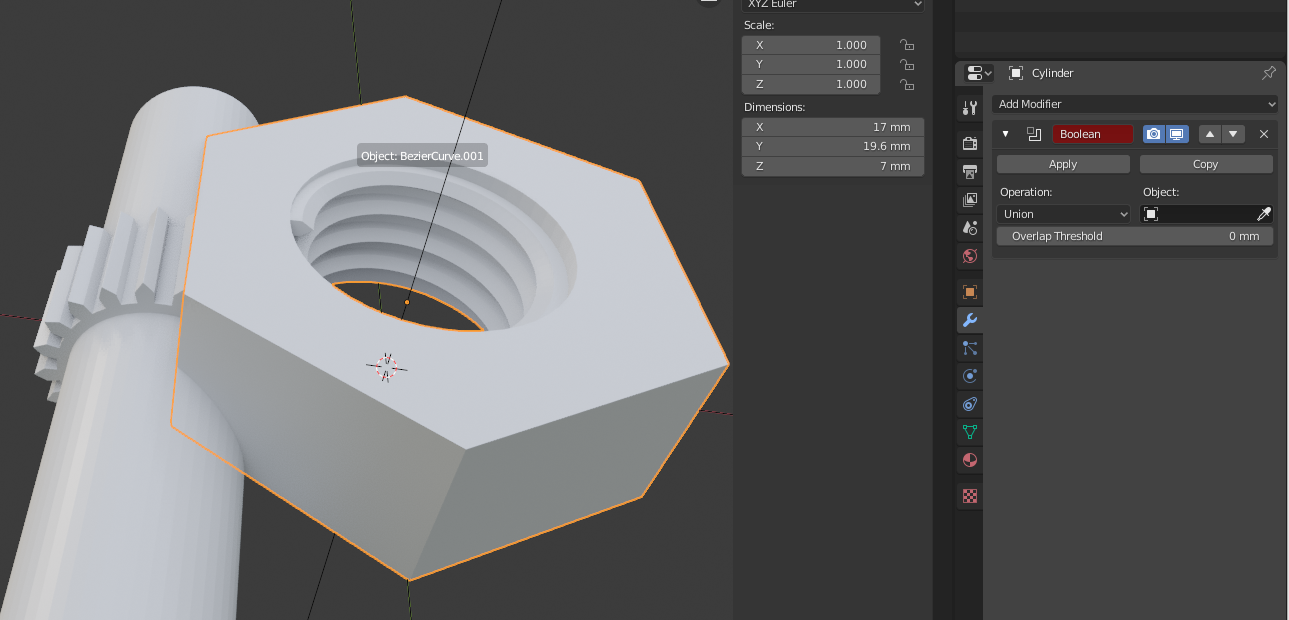
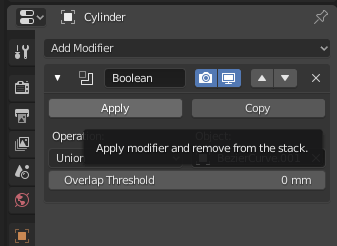
Creating one screw nut






-


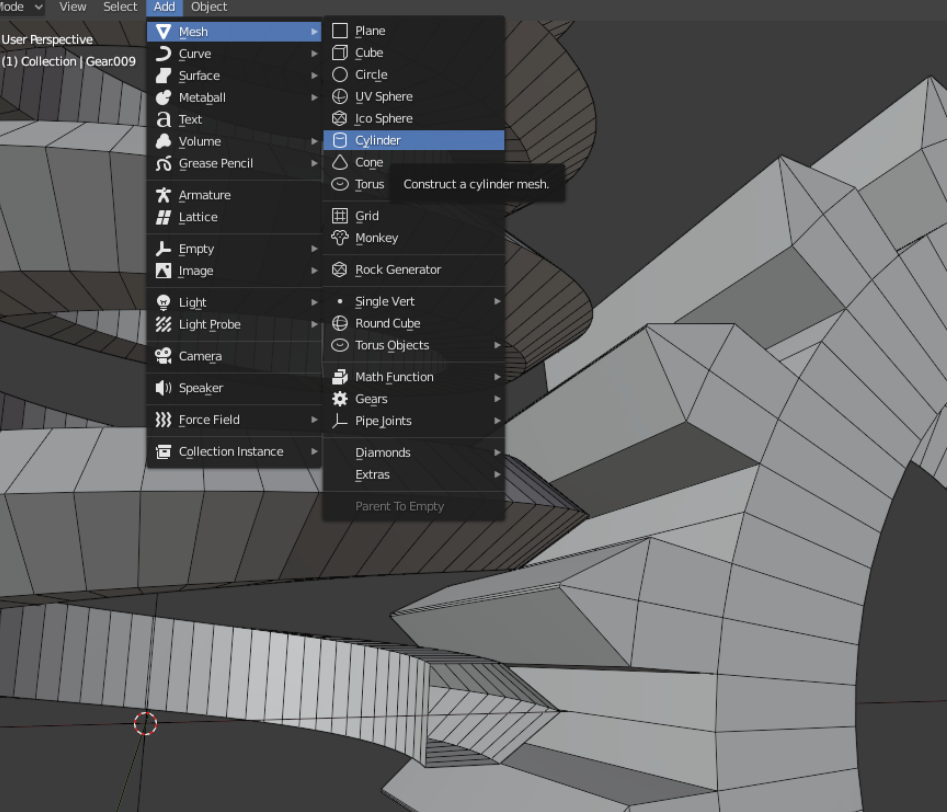
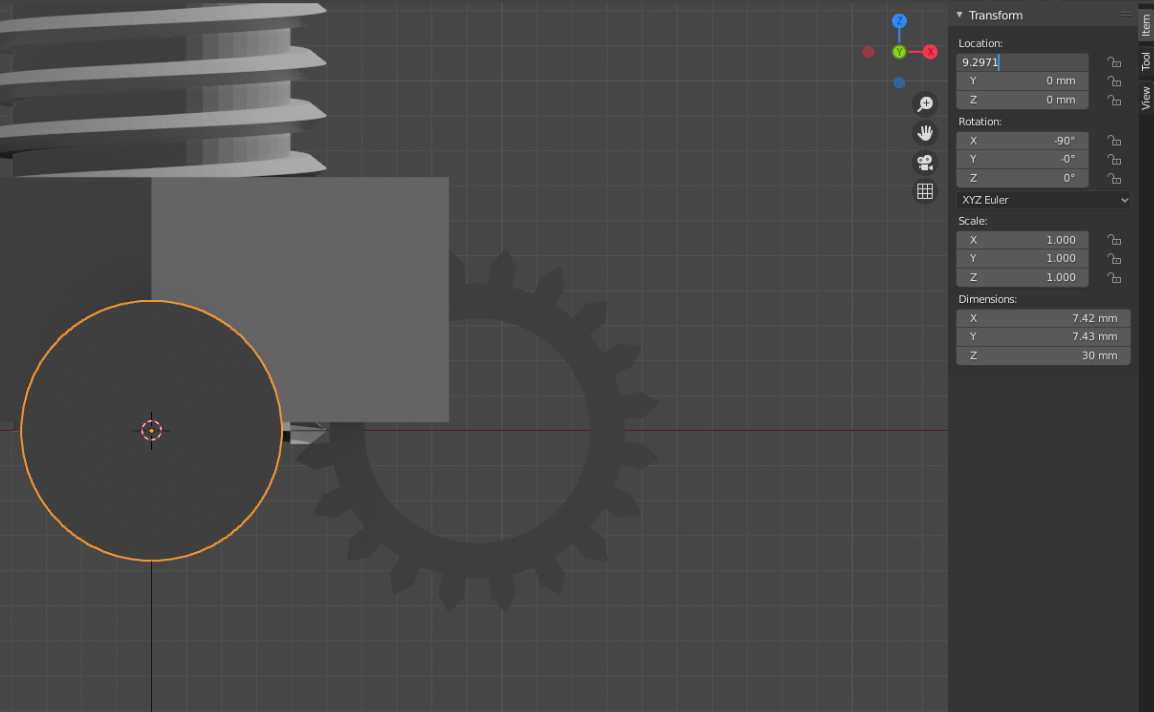
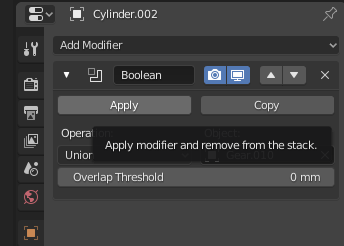
Creating the screw axis



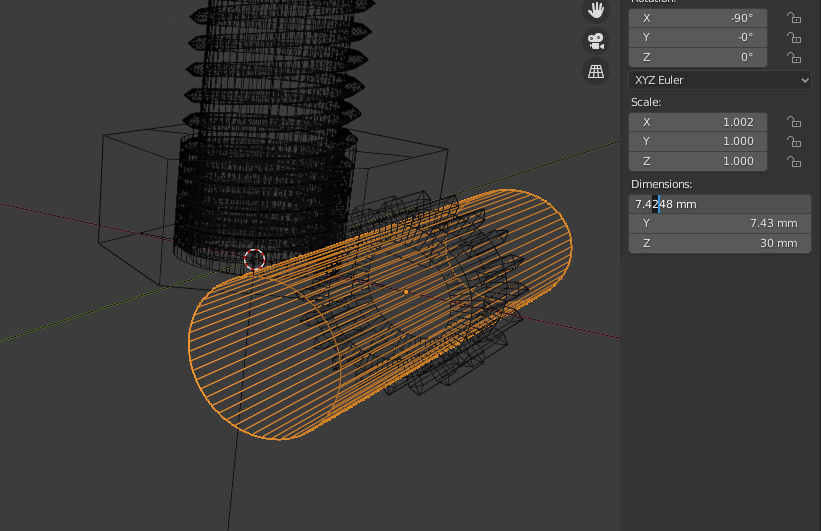
Creating the gear axis



Sources:
https://www.metalmecanica-facil.mahtg.com/tsinfycor/calculador-tornillo-sinfin-y-corona.html
http://www.valvias.com/prontuario-rosca-metrica-din-13.php?m=11
https://docs.google.com/spreadsheets/d/1aFcktbNmx7cTsuAU0JgZB2Xayx76sSm1ici_PpTlju8/edit?usp=sharing
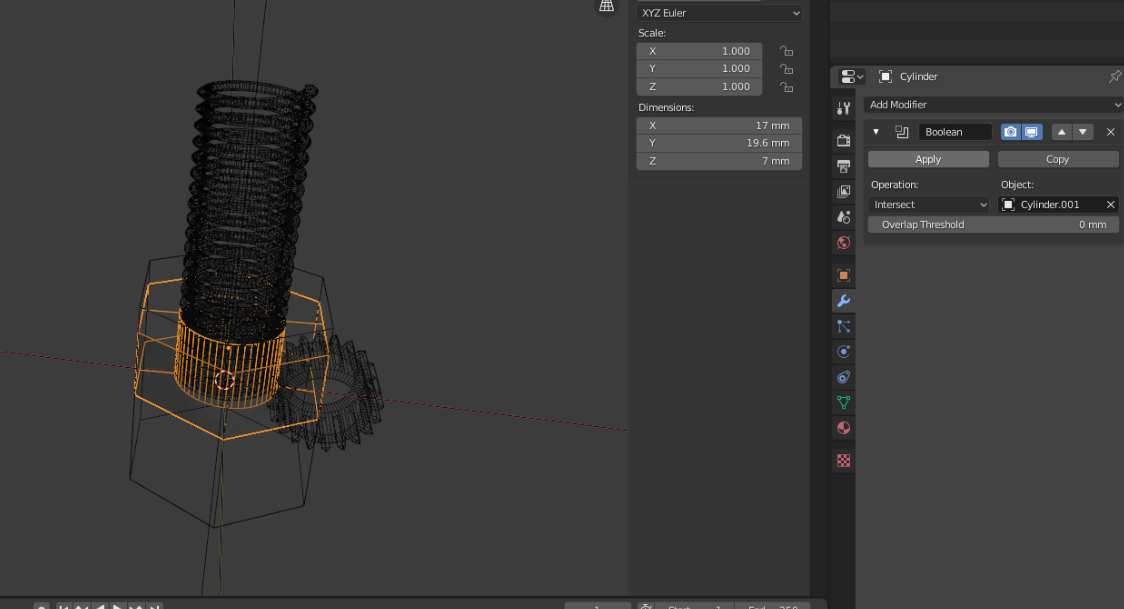
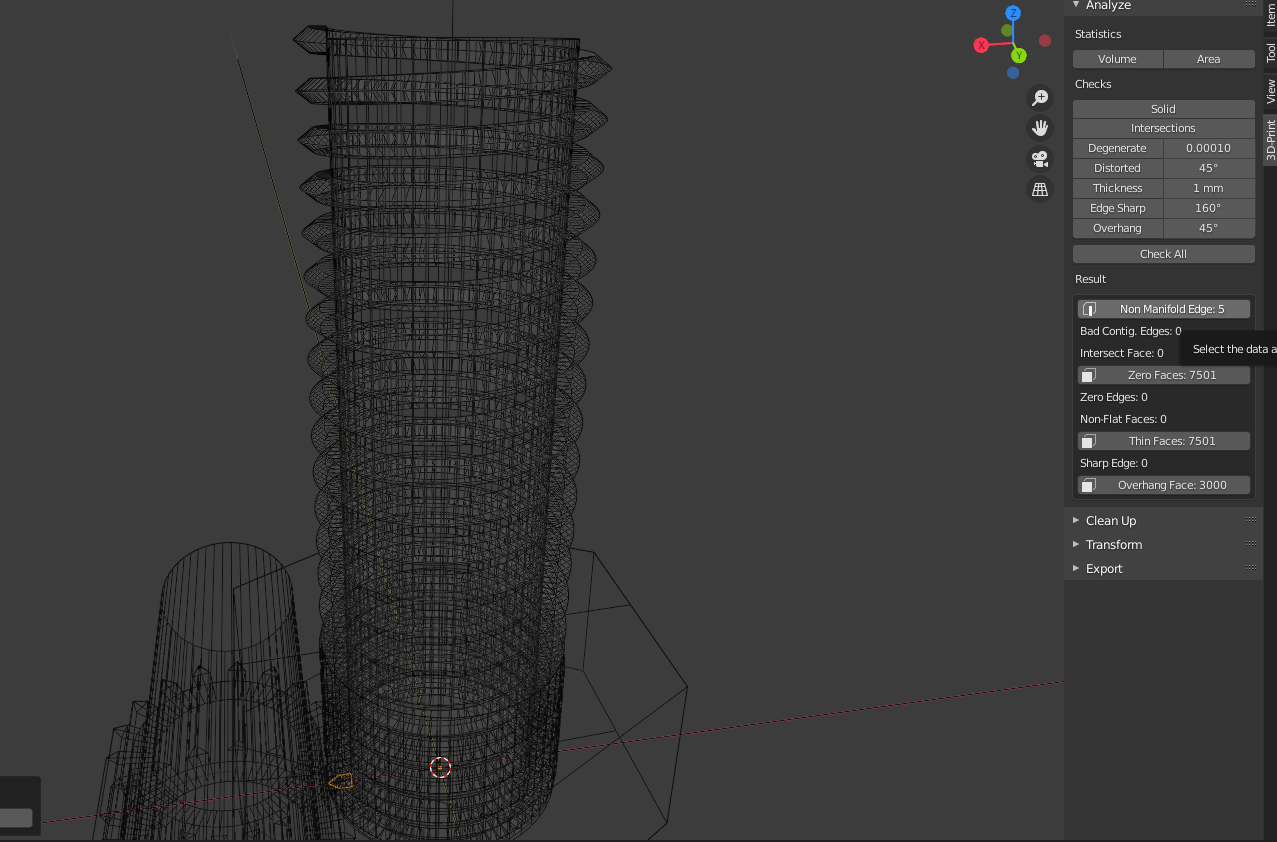
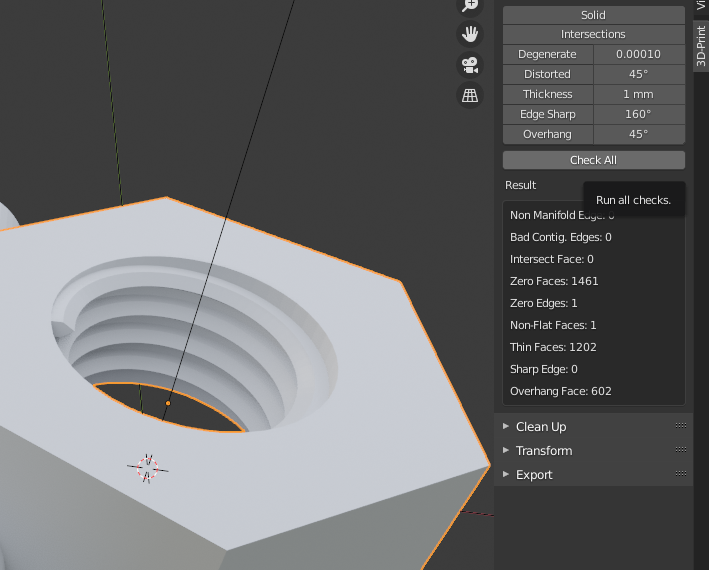
CONF adjusting tolerances:
Reduce 10um gear axis diameter
Reduce 10um screw axis diameter
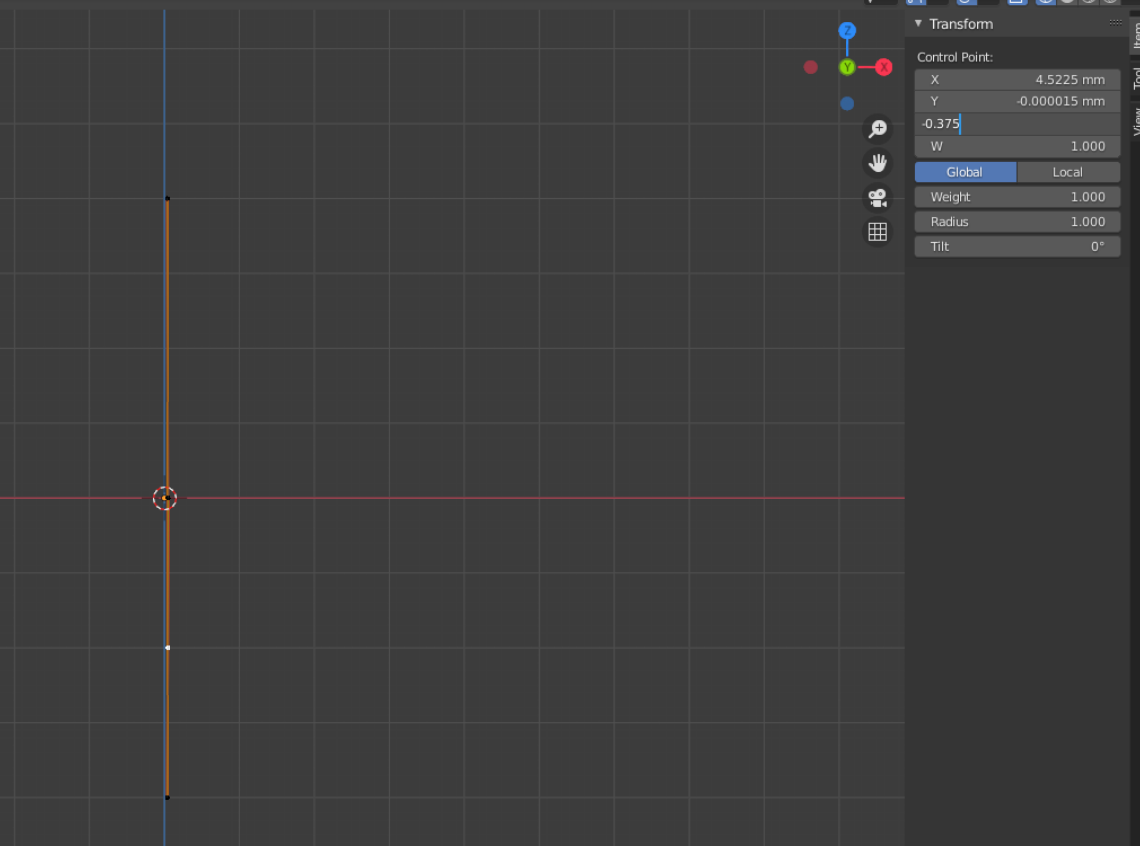
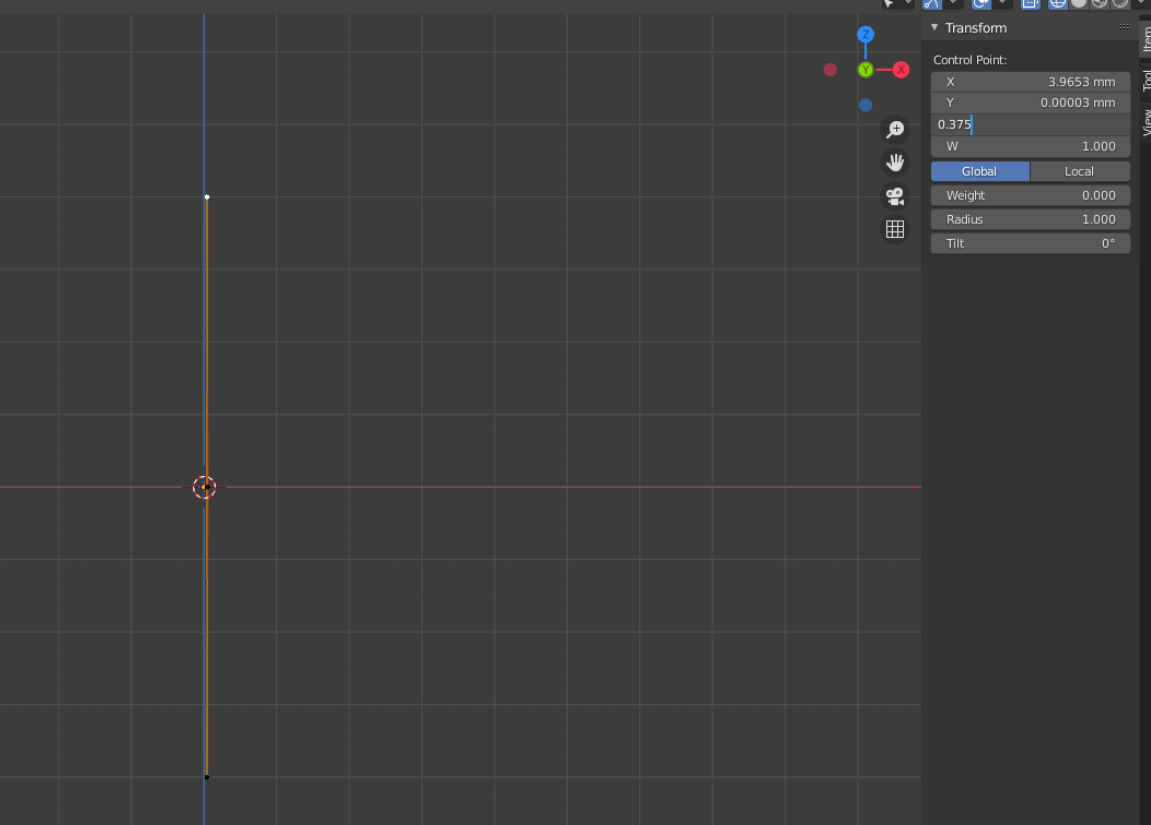
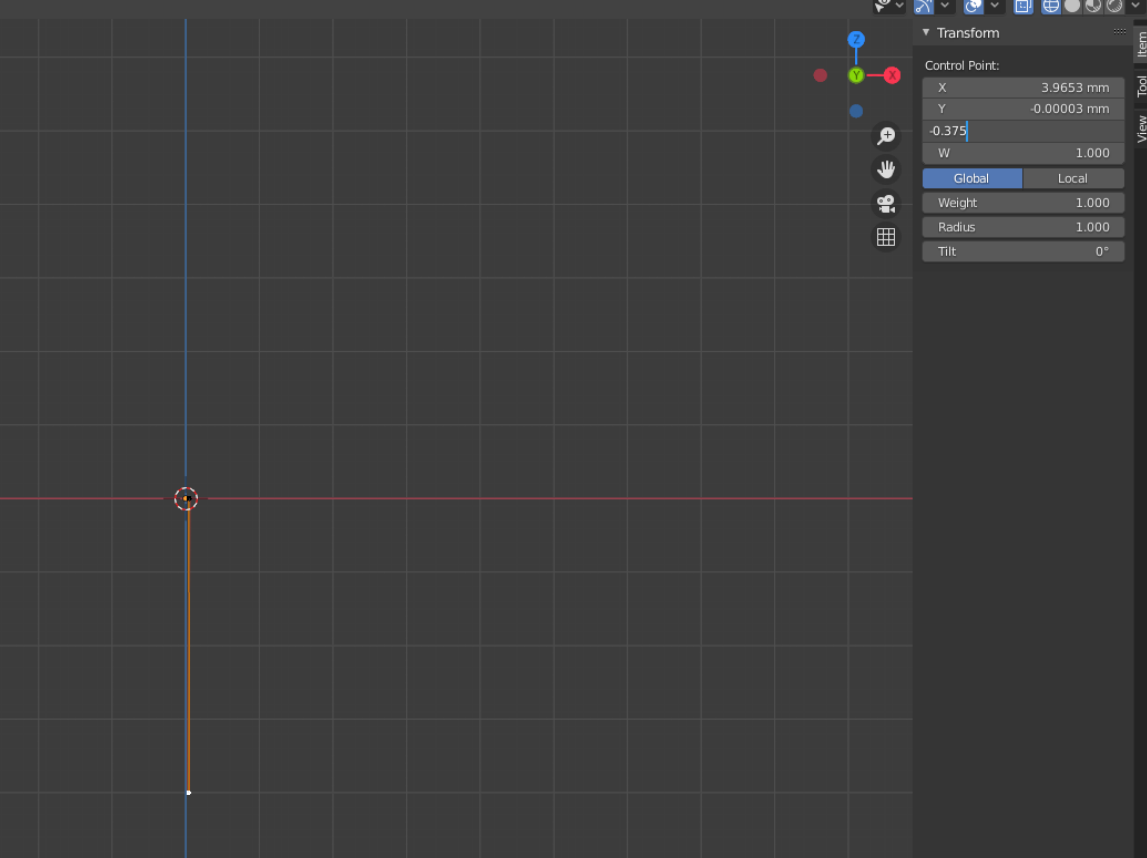
Down 10um nut tooth top (1.125mm to 1.115mm)

Up 10um nut tooth top (0.375mm to 0.385mm)
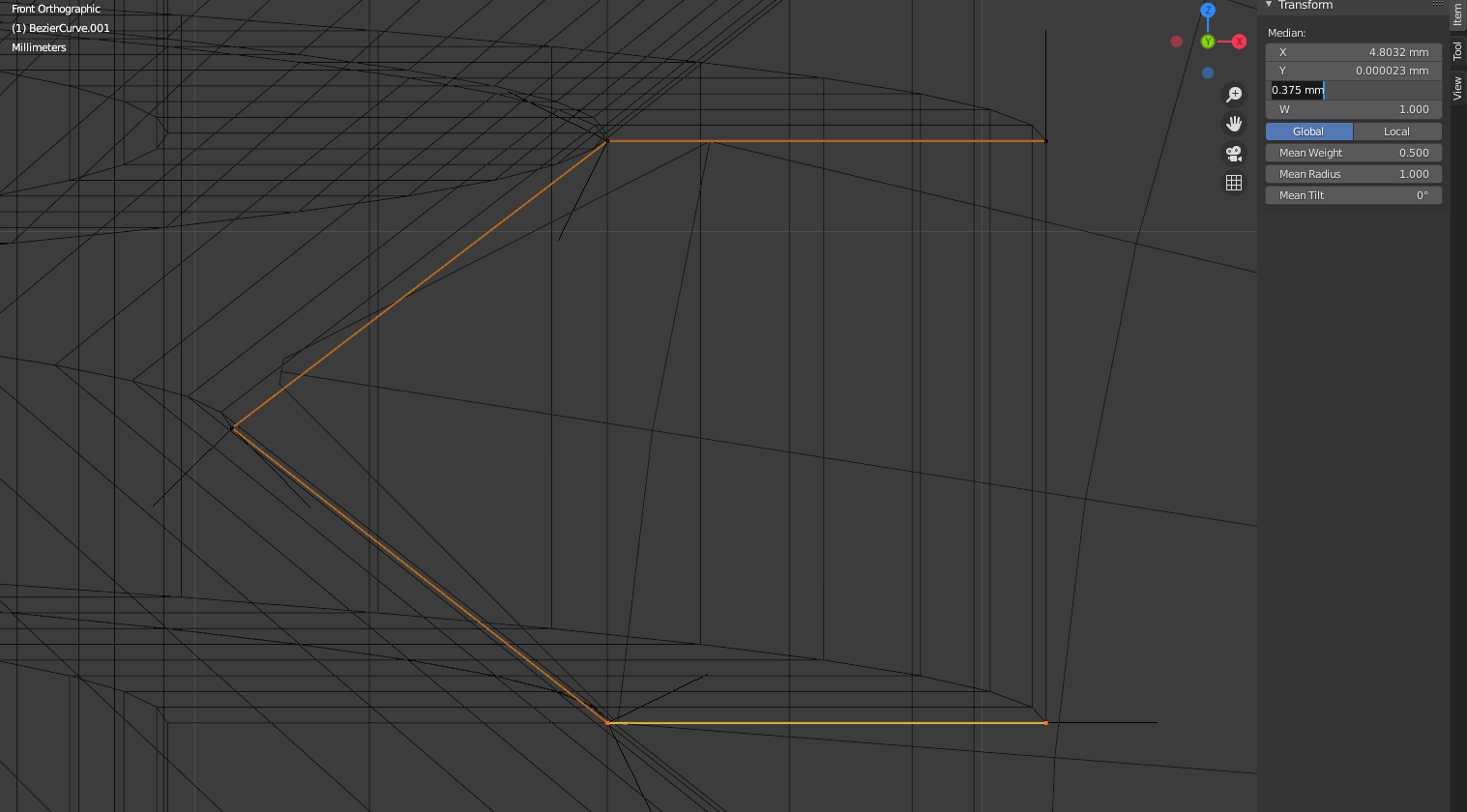






Note: Make the same for the nut tooths
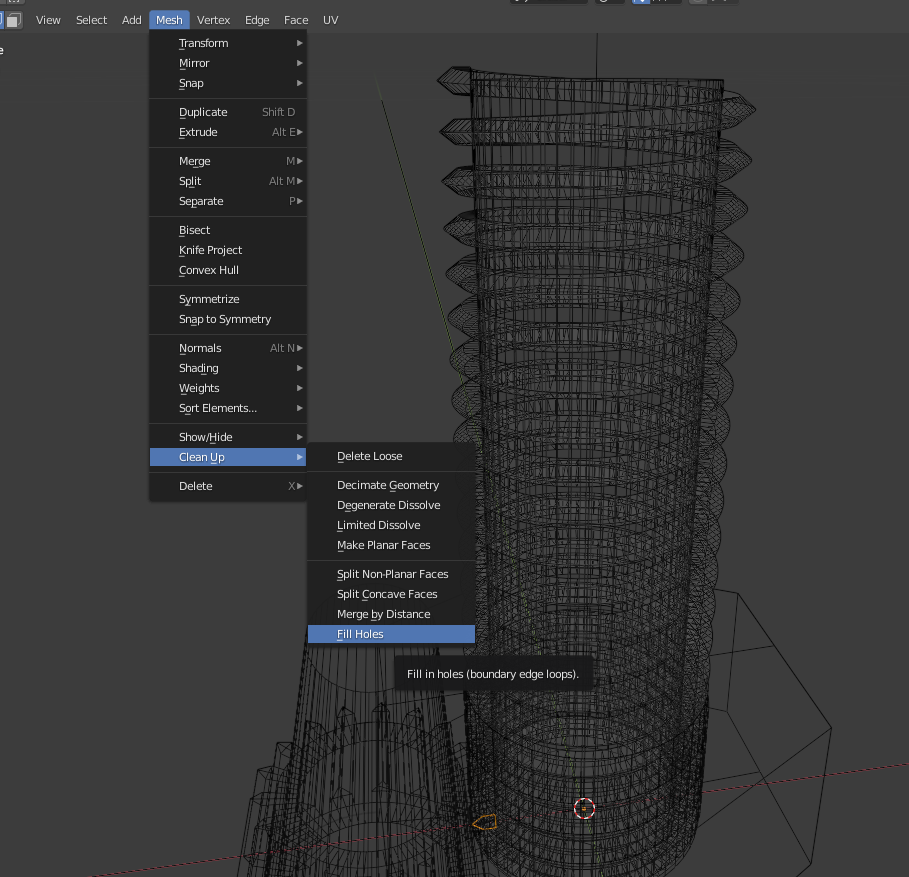
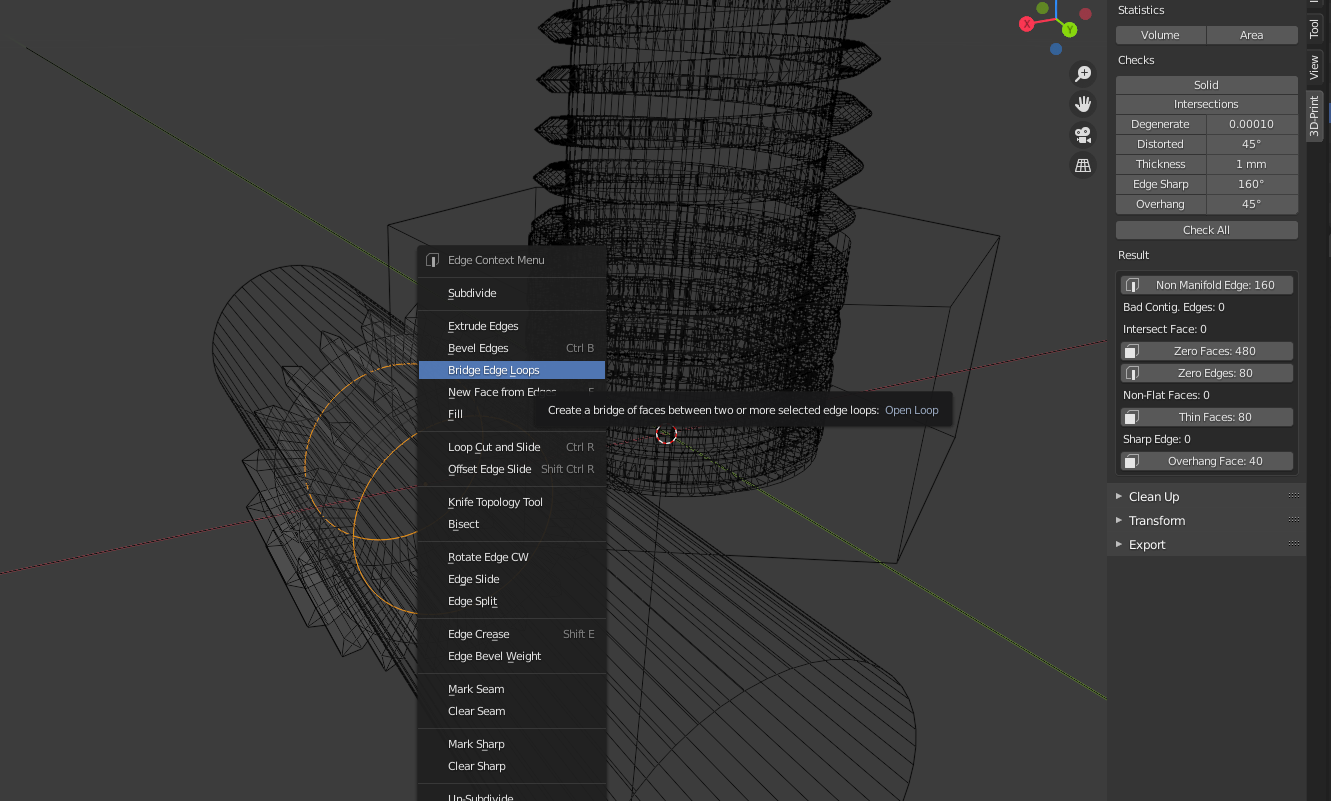
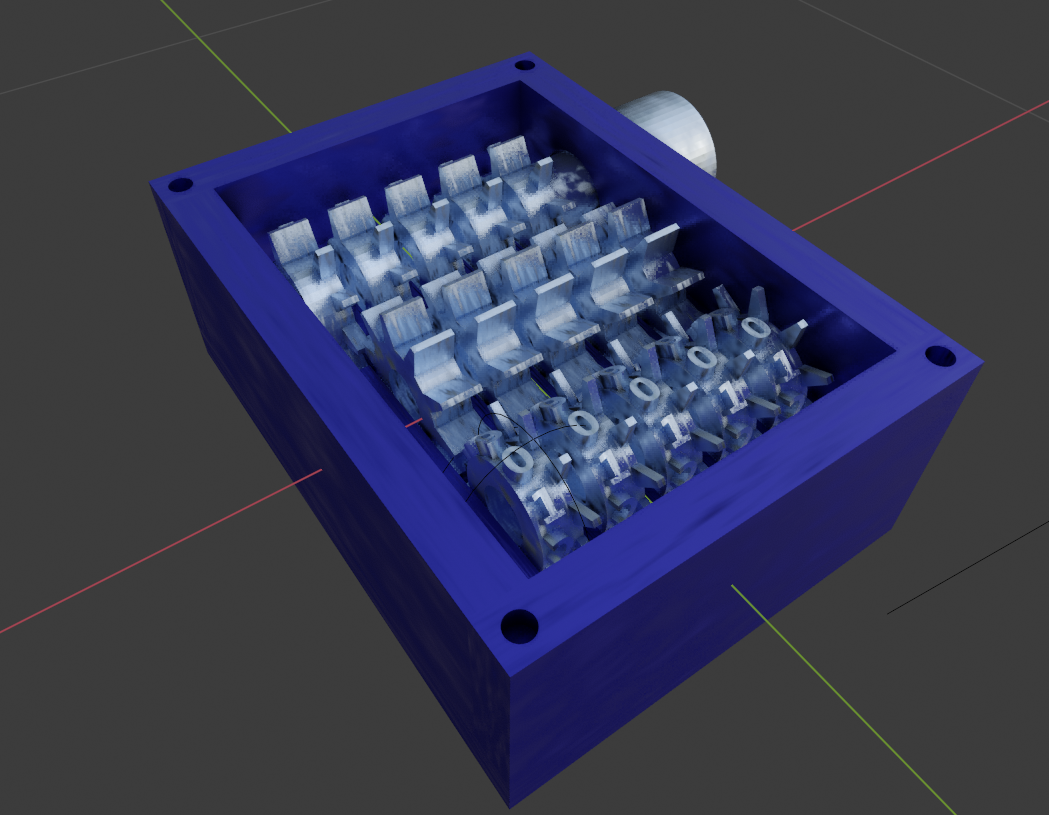
Now join the axis tooths

and nut tooths
and gear axis

 -
-
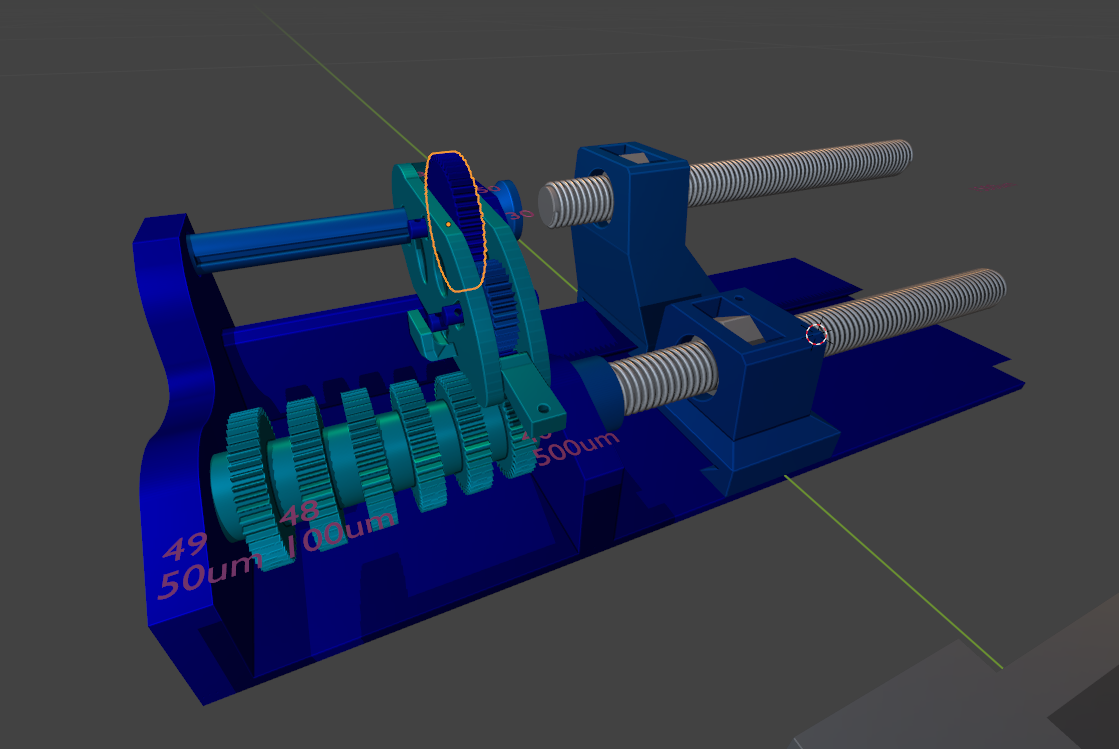
20 tooths = 1:20 (around 75um per 1.5mm step)

reductor multiplier :)
1.5mm/20 = 75um
75um/20 = 3.75um
3.75um/20 = 187.5nm
187.5nm/20 = 9.375nm
If I place more of these I could do a kind of clutch disconnecting 2 and 3 and connecting 1 and 4 when apply some movement of joystick. I will need to handle micro-things in 2D/3D for future projects.


Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.