Alright, so the first print shows promise, but also decidedly did not "just work". For one it is technically impossible to assemble, a rookie mistake. I actually broke a piece of the momentum-switch slide assemble it. Separate from that, I need to buy a better toggle switch. The first one broke surprisingly easily and the other two of it's 3 pack were DOA. Not all toggle switches are created equal.
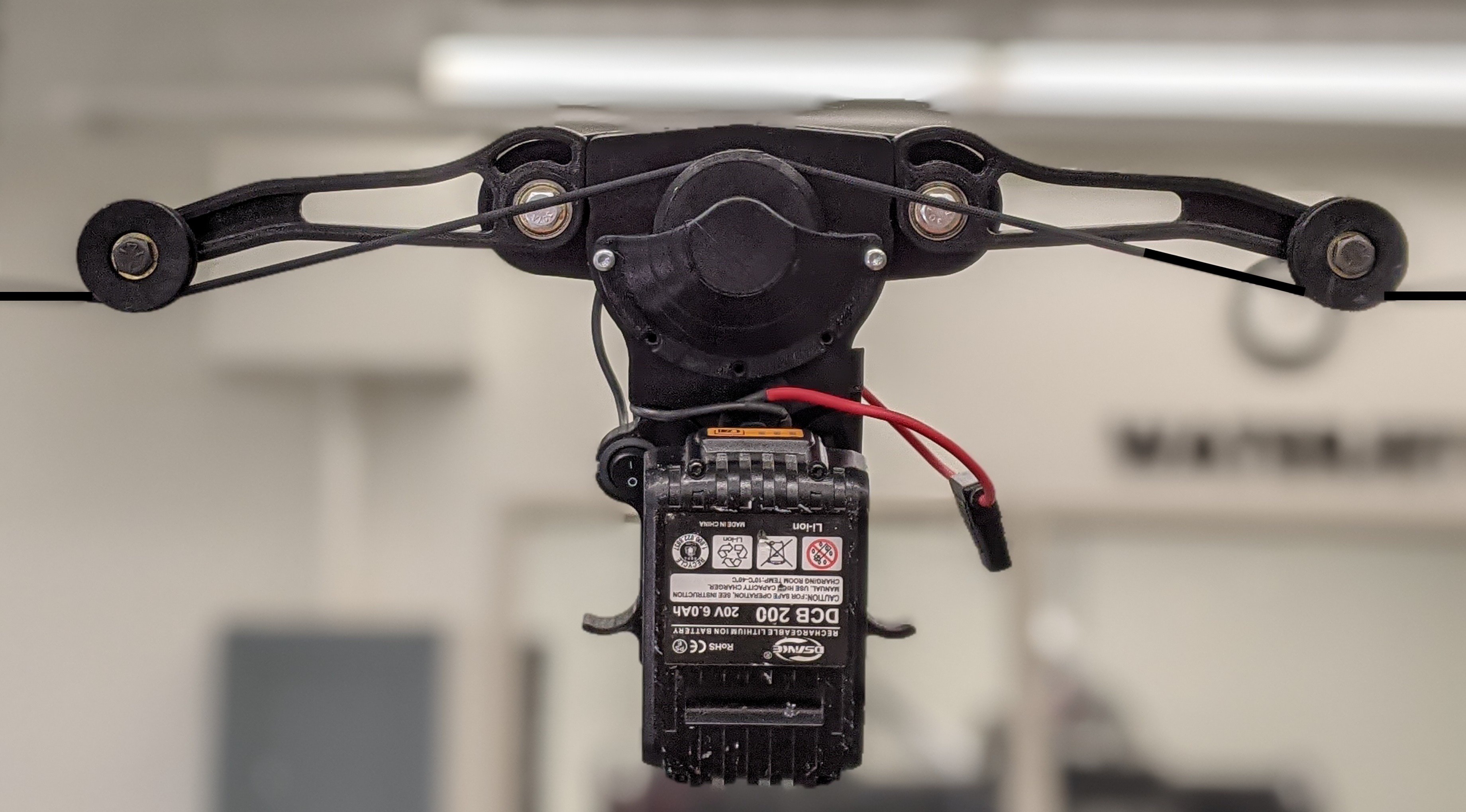

The motor support bracket seems to introduce a lot of friction without adding much benefit. The bot ran ran much better when I removed the support bracket, but even then it's slower than I want. My orignal speed estimates didn't take into account that I am driving a 24VDC motor with a "20V" battery. Next round I'll try an equivalent 12VDC motor. 
Over all I'm actually quite pleased and like enough of the core ideas have been validated that I'm *probably* not going down a dead end road.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.