 Michael Möller
Michael MöllerRight Driver for Stepper motor
OK, simpleminded me :-| it is quite clear. A Stepper that is designed for 2phase (or BiPolar) operation works badly when driven as 4phase/Unipolar - even if the coils are individually available. Or at least with the oversimple driver/ULN2001 I used.
I found in the bottom of one drawer a StepperTest device, hooked up the steppers that gave me problem - and they worked beautifuly smooth and accurate. <Forehead slap!>
So what is the status, and thus the two plans? Remember, exhibition opens on Thursday.
28BYJ Steppers
The currently fitted steppers, turn slowly, because their 48 step/revolution is through a integrated reduction gear giving them 2000 step/rev. At the fastest I can drive them they are too slow, so I have 3D printed mechanical gearing that undoes some of the reduction bringing them back to 360 step/rev. There is slack in the gearing, and I could say "that's a feature, not a bug!", especially as the clock is supposed to be "tired" or worn out.
I will carry this to completin (it is "nearly conmplete") and this is my Plan B (from where Plan A went awry - see previous log).
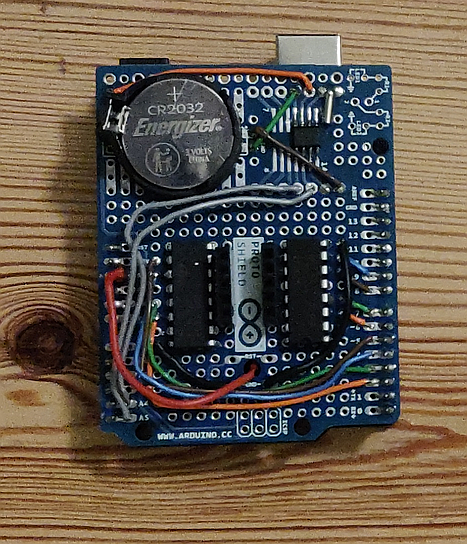
This is the board, complete. Well, there are no pinheaders for he two limitswitches (for the steppers to zero on powerup) nor the distancesensor, but that just a minor detail.

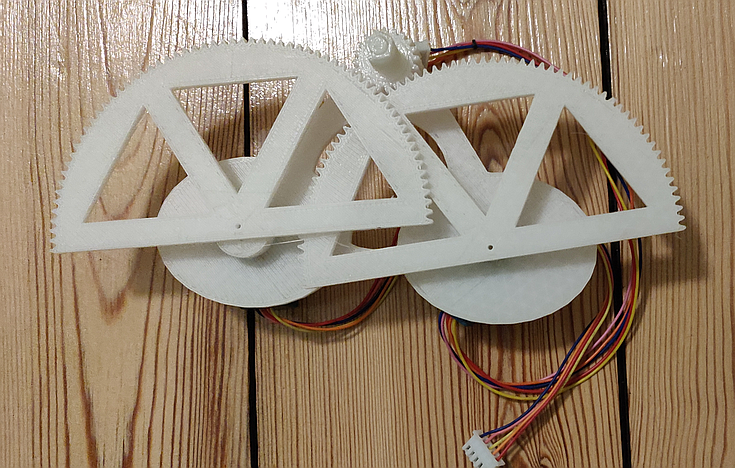
The gearing. Its 122:22, so only a fraction of the large gear is needed. This way it is also easy to place the endstop switches. The two clockhands go on the small gears at the apex.
J262-135 steppers
these "failed" initially. (Incidentlly, salavged from office copiers) Using them requires the right driverchip ( I have found two, together with the steppertester board) and a new 3d print gearing mount, as they are 48 step/rev - too coarse. I need to make a new shield with those drivers (and also use another of my DS1307 chips/crystals) so that I keep my Plan B version intact.
I presume that movement will be quicker/cleaner, and thus I call it Plan A. But with the deadline, work on it will wait until Plan B is "presentable".
Either still needs the software. It is sort of complete (but not tested with motors) and changing the step/rev for the handmovements and the different driver chip is just changing that function(class). It therefore is not an issue.
May the Best Plan win!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.