 AdityaPrakash23
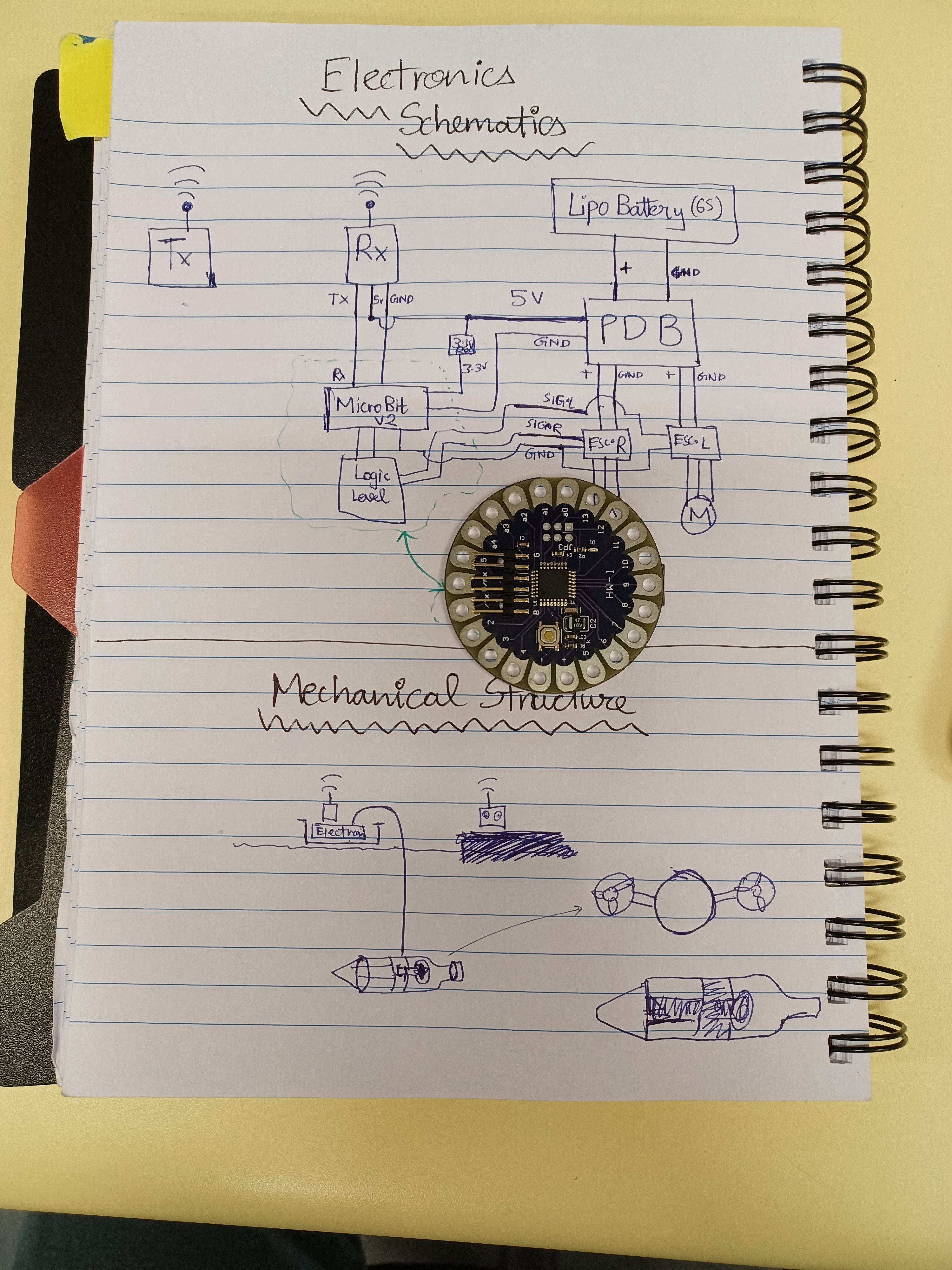
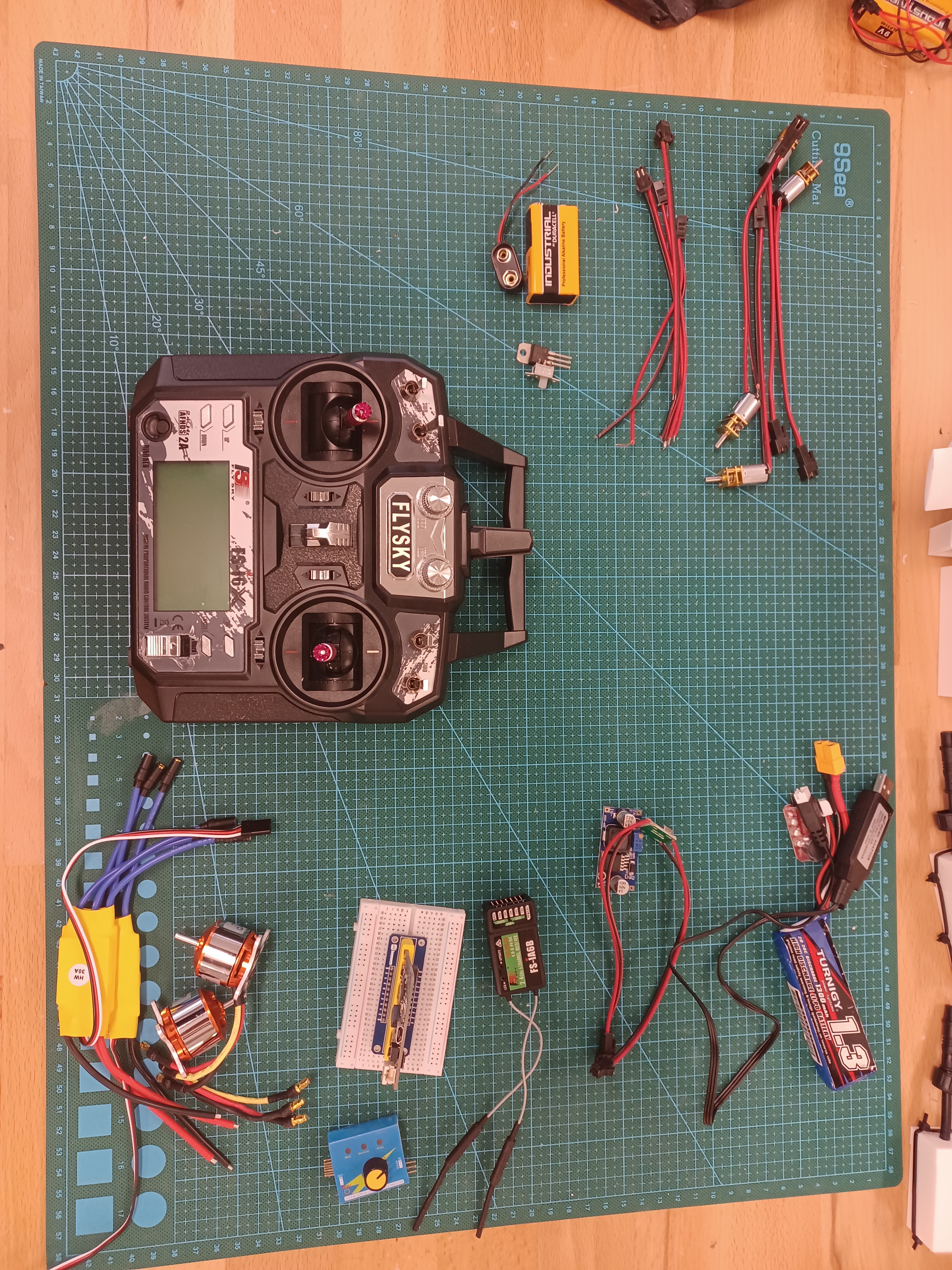
AdityaPrakash23I started with the practical work for the project. I assembled the electronics that I have available and tried to organize them. Since I am going to be putting the motors underwater using a tether, I will need to account for the connectors there as well. I have made a rough electronics design and mechanical structure. The major issue is the microcontroller. Although I have standard Arduinos, I want to use a different controller for this project. I have a Microbit v2 and a Lilypad, which I am inclining towards due to 5V operating voltage. I will need to first try programming the Lilypad and get comfortable with it, which is the first thing I will be doing. Then I will quickly code up parts of the overall rover software, verify and then put them all together.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.