-
PV
02/28/2022 at 20:58 • 0 commentsI have visited a local Hardware store that is in itself a magical emporium of 'Maker Delight'.
They can supply fastners, tools and metals in the forms of sheets or bars.
Like a book shop I am genetically predisposed to buy something in there !
I was going to buy some strips of 3 mm plate but they suggested some specific strips that are specifically made not to bend rather than plates of Aluminium.Previously I obtained four 250 M8 threaded rods. These are to support a cover and the Solar Cell and other aspects.
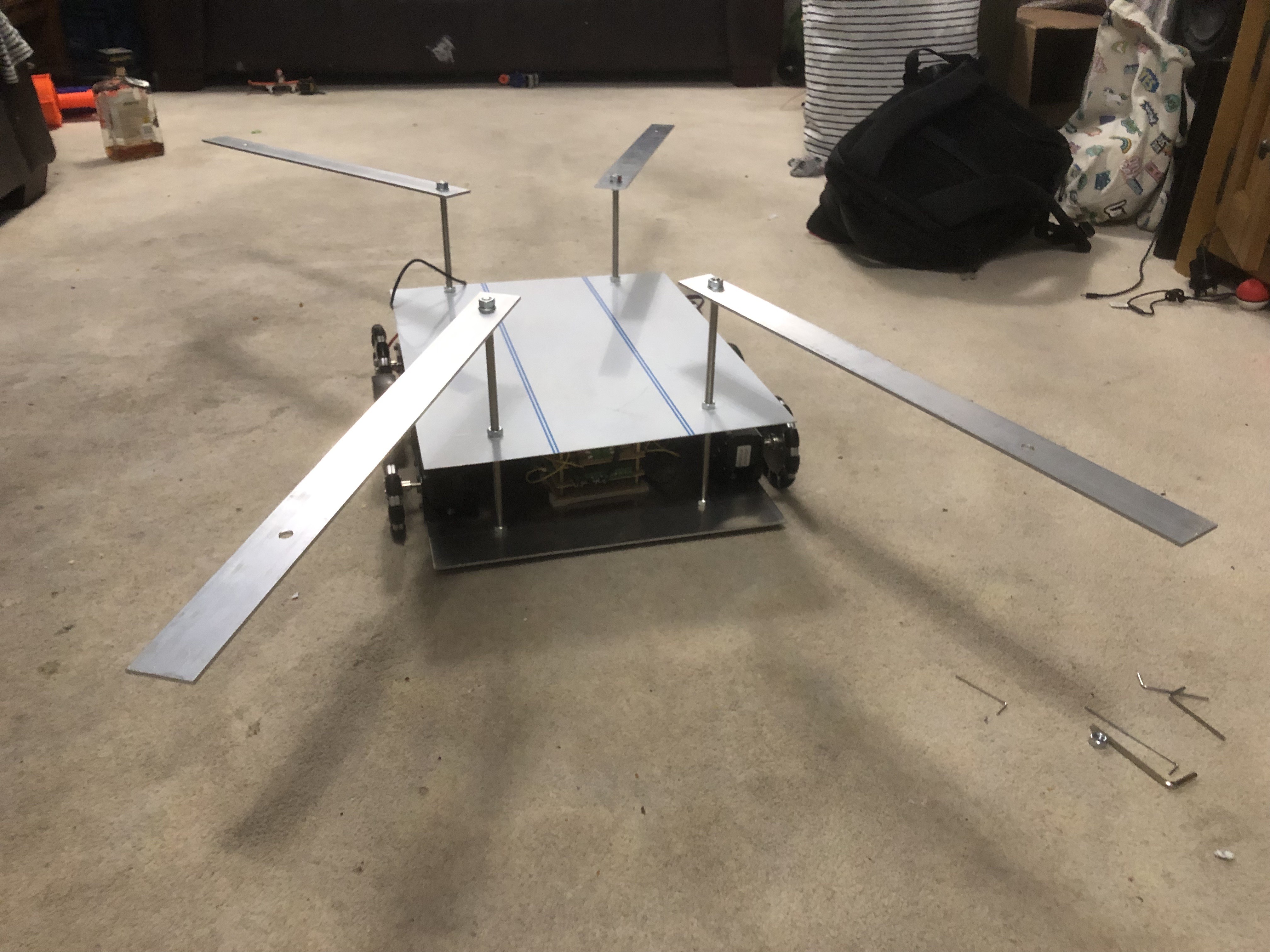
Four 500 mm x 38 mm strips later I got to drilling some holes. The strips will be supported by the rods. The threaded rods allow a setting that can be adjusted.As will be seen that PV has a hole in each corner, the manufacturer intended these to be places that could be hooked onto something. They are in fact M8 holes which take the bolts I had also bought quite nicely.
There followed an element of too and fro to get the PV into the right position but once happy I was able to make some marks for the bolt holes.
Once these holes were drilled I was able to put it all together !
![]()
![]()
The Spars are deliberately longer, the rear ones so that the LoRa antenna can be mounted, the front to provide extra height for sensors.
The bolts are also overlong so that PV can also be raised so that any extra height can be provided for the 203 mm diameter wheels. -
Rotate
01/23/2022 at 17:26 • 0 commentsNow with the two of the Omniwheels installed I attempted to get the Rover to spin on the spot.
Still no luck so I lifted the Lead Acid battery and saw that there was some movement.
I have a power pack that was part of a Solar Cell pack.
This pack has the ability not only provide USB power but also a 12 V output via a 5 mm barrel connector.
I created a cable and connected it into the stack.
Programmed the Arduino to spin the wheels, one side in one direction, the others in the other.
This appears to have almost worked.
I say almost because I was hoping for it to rotate on a spot central the Rover.
It appears to be rotating at a mid point between the two front wheels with the rear wheels slipping.I made tried programming the Arduino to just rotate the front wheels, however it juddered a lot.
A further experiment was to increase the speed of pulses into the motors. This gave a smoother rotation, still between the front to wheels.
Now note that this may be because the the front wheels have a lot more traction with the ground, the Omniwheels are not so 'grippy' and think this is why the result is what it is.
I will try putting the old wheels back on and see what happens.
Here is the video of the initial experiement which has the ok result.
-
Expansion
01/09/2022 at 13:15 • 0 commentsI've ordered some new wheels for the Rover.
The present ones only give about 20 mm clearance, which isn't enough really.To improve this I've ordered 8 Inch Wheels. This should give approx 150 mm of clearance.
This wheels however don't have a 5 mm D type shaft connection. However the Roboshop also supplies the appropriate hubs which have 6 mm D shaft holes.
Amazon provides the appropriate converter and also 6 mm D Shafts.The other advantage of this approach is that there is in theory there should be the ability to put a third set of wheels. These would have have either two inboard and one outboard or the other way round.
A couple of issues, the wheels will take time to get here and there are only three immediately available. Oh well this isn't urgent :).
-
Success
01/04/2022 at 20:44 • 0 commentsI updated the program so that it started off slow and then changed the speed of the PWM.
This is excellent news ! It means that the project is viable !
-
Nudge
01/03/2022 at 22:14 • 0 commentsToday has been of rush as I return to work tomorrow.
First thing was to investigate why there was a clicking. This turned out to be an accidental short between the stand offs and one of the power supplies. Easily fixed by cleaning up the tracks with a drill bit.
Next to re-solder one of the solar cells, now that I have a better soldering iron and tinning agent then turned out a lot better. I then sealed the connections with blobs of glue.I looked into how to generate a PWM like signal from the Arduino. I discovered that there is a delay capability down to us. This successfully generated I connected up the system with the Rover stood off the ground.
Got wheel rotation but forgot to flip the direction of travel for the other side. A couple of line of C and a couple of wires made to connect into the direction input of the Driver.
Set the Rover down and set it off. Or rather I didn't.I switched the current selection to 2 A. While still stationary I was able to get forward movement by a small nudge this looks like it needs to overcome some Sticktion. This might be why there is a 'ramp up' of frequency on Electric motors. I'll look into this after work.
-
Power
12/30/2021 at 21:15 • 0 commentsI have decided on a dual power supply, one for the Motors and their Drives and the other to supply the 'compute' aspects.
The 12V battery supply will provide for the Motors/Drive and the Lithium P for the compute.
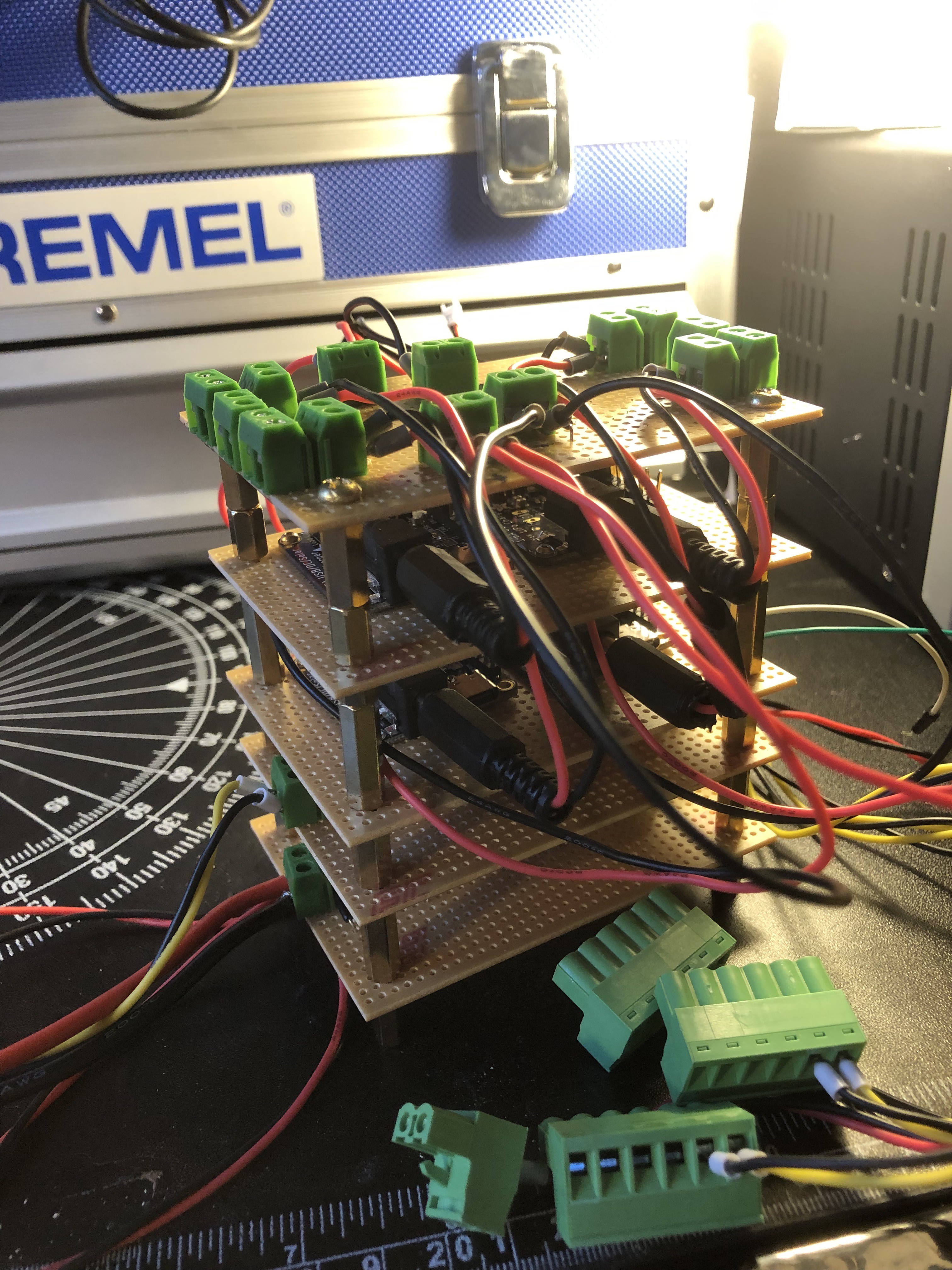
These supplies need to be distribute and to save space I've created a 'Distribution Stack'.
This can be seen here.
![]()
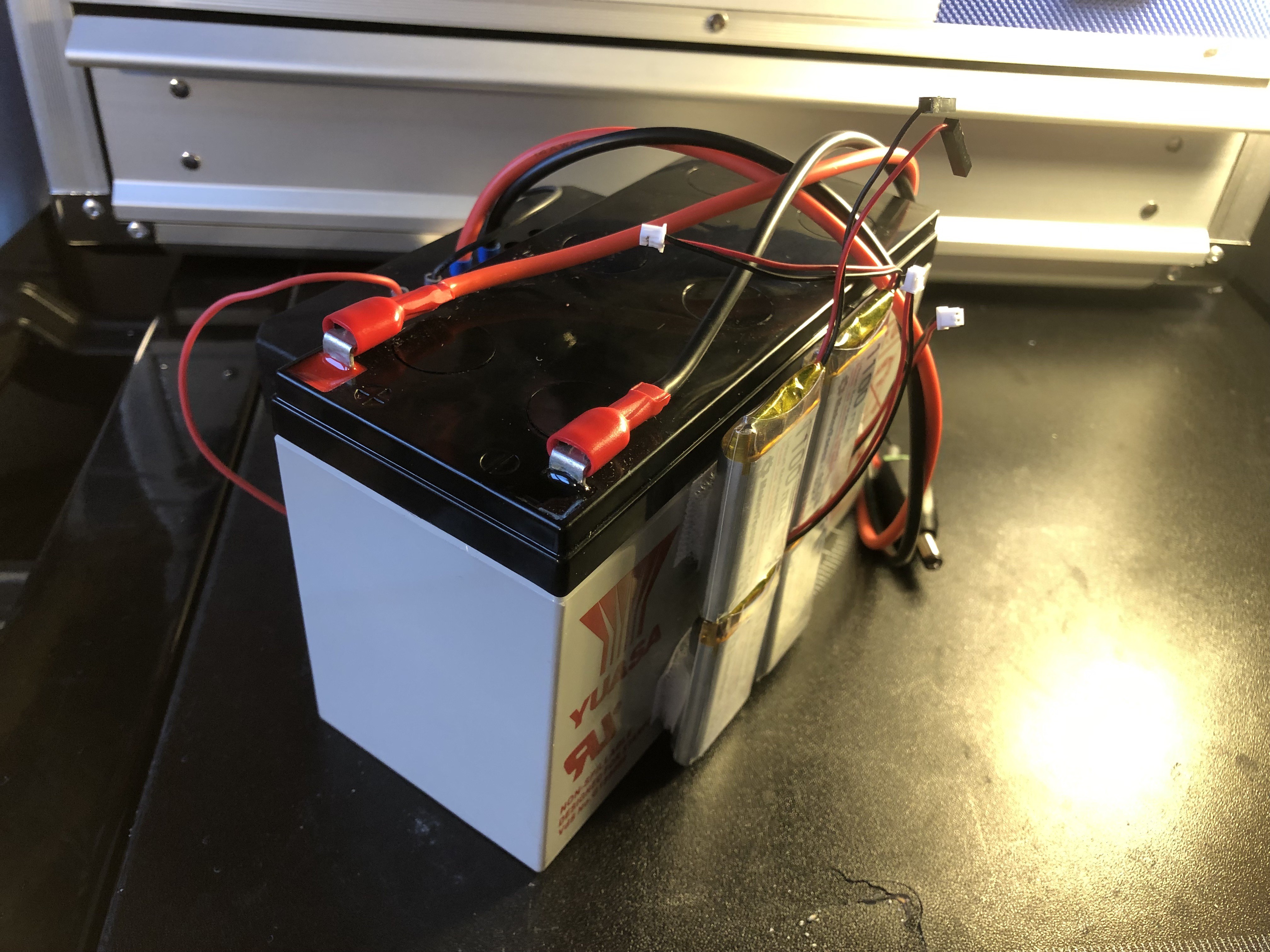
Also to save space I've velcro'd the Lithium, the Lead Acid and the Solar Controller together.
Velcro is useful to tear things apart quickly.![]()
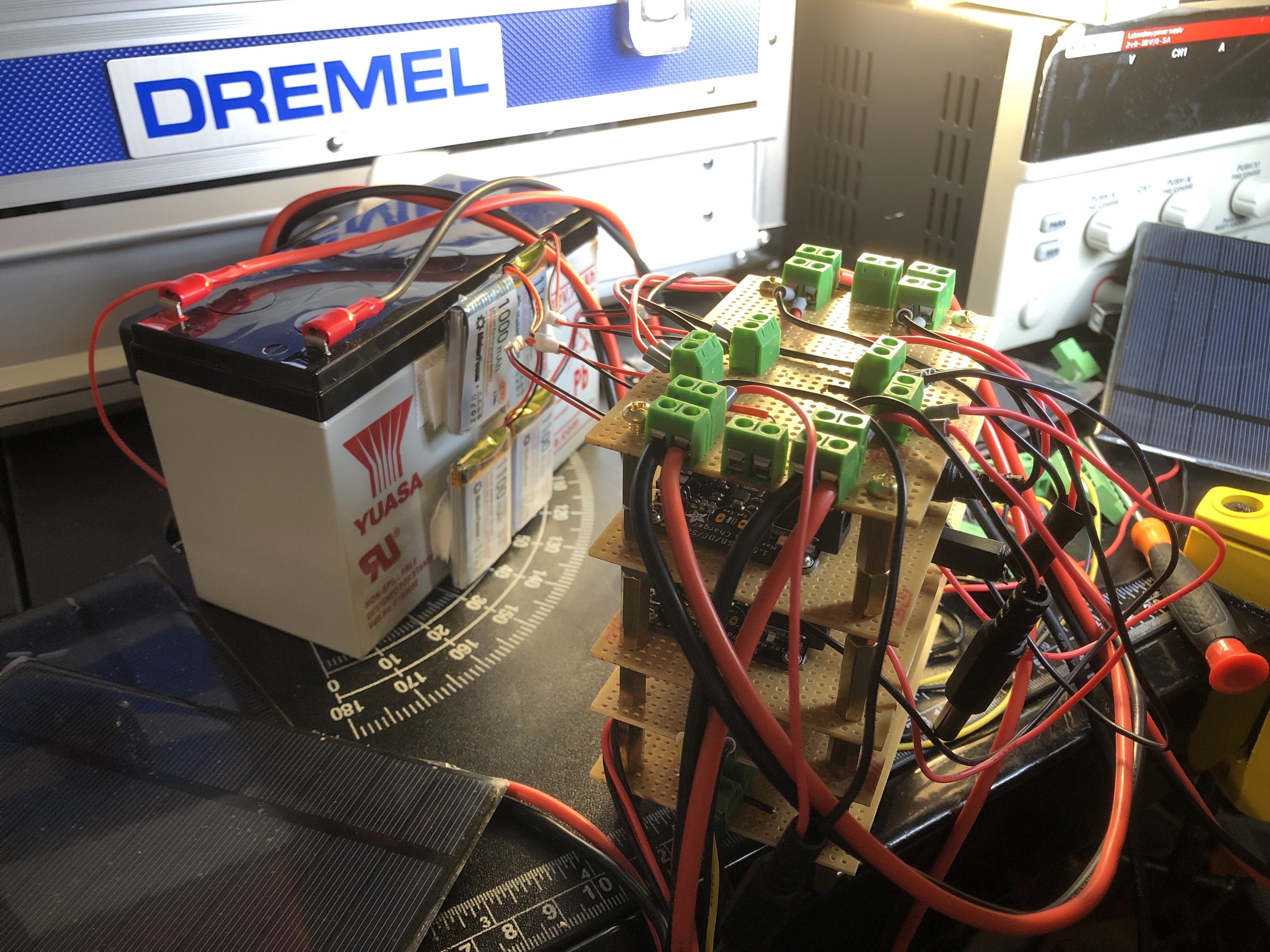
These can now be connected together. You will note that one lithium battery is different, easy to change and replace because of the velcro.![]()
You also see that solar cells for the Low Voltage supply connected.
While I haven't connected the Motors and Drivers up I have successfully connected the RPi and the Arduino boards and powered them up at the same time.
Not fully tested them but it does mean we are on our way, -
Drive Train Test
12/23/2021 at 22:18 • 0 commentsAfter the problem with the last run I diagnosed what the problem was.
One of the Drivers was set for a fairly high current setting.
However to avoid the issue again and to be perfectly honest to make things a lot cleaner I took a Vero Strip Board and put some screw terminals on it thus distributing things a better. I also paralleled up the supply lines with wires so it should be able to carry the current.I've also created a distribution board for the pulse signalling.
Both of these boards worked well. Note I kept a constant eye on the power distribution board to make sure.
I gradually increased the frequency generated by the Sig Gen and got up to 3.2 kHz which gives 120 rpm.
It worked out well.
I think there will need to be a separate solar cell for the signal collection and transmission. The reason being that the current spikes due to the Stepper Motors might cause problems for the processors and the LoRa transmission/reception.This will be provided by the separate smaller cells and the lithium cells.
Here is the system running.
-
WOOF, WHO LET THE SMOKE OUT, WOOF, WOOF, WOOF
12/21/2021 at 18:49 • 1 commentAhhh the joys of full up prototyping.
3, 2, 1, SMOKE !
A very jury rigged all four motor with battery, solar cell and sig gen to provide pulses drew a little more current than I was expecting. A thin wire was used in the return path wasn't big enough.
As soon as enabled the sig gen the wire smoked.
While not good not terrible. This was part of the learning exercise. As they say no experiment is a failure if you learn something from it.So what did I learn.
1. Have a better prototype Wiring Harness using some form of proper distribution technique.
2. Dragging a high quantity of Current which is surprising. I was expecting no more than 800 mA.
This will have an impact on the longevity of a trundling. Well ok ! This is again great as I'm learning new stuff as we go.
Tomorrow I get some pcb screw terminals which I can mount on some vero board, this will be a better form of distribution capability that screw blocks. -
Underload
12/14/2021 at 21:31 • 0 commentsI wired up a four batteries and then loaded the stepper motor.
Max current was 500 mA but it was interesting to with a heavy wheel in motion.The wheel is quite heavy so there was an element of gyroscopic effect seen.
This shouldn't be a problem as the rotation speed should be low. -
Current Versus Frequency
12/13/2021 at 22:32 • 0 commentsI connected up three 3.7 V 1.0 Ah Batteries that had been charged up using the Solar Cells. These went via the battery charger circuit which steps the voltage from each cell to 4 V.
The sources were placed in Series so the voltage across all three comes up to 12 V.Using this I connected the supply to a Stepper Motor Driver.
Connecting up the Stepper Motor to the Driver and used a Signal Generator to provide 5 V Pulse input.
When the sig gen was enabled Stepper motor rotated.
This proves that the idea of a Battery charged by Light can rotate a stepper motor.
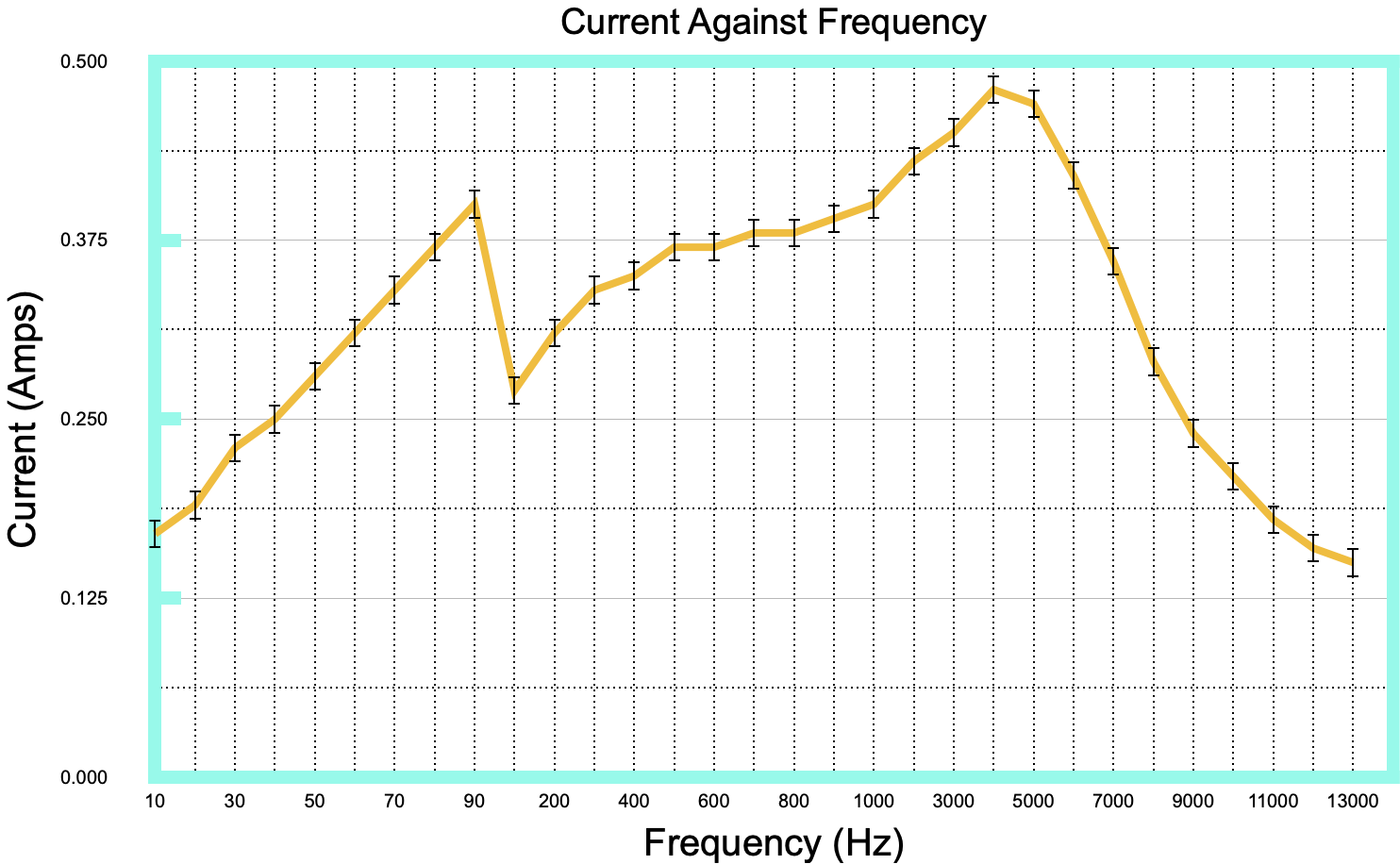
I decided to see what the current draw would be for different frequencies.
Using a DVM set to the 10 A range I was able to get some measurements, unfortunately the resolution was at 10 mA. The next range was maxed out at 200 mA.
Also this curve has large number of data points missing so the 'curve' is not to be taken to heart and just an indication.
I guessed the error bars to be +/- 10 mA.
The Stepper Motor had no 'Load' but when trying to hold the shaft I could see the current increase.
Here is the graph.
![]()
The peak current about 480 mA. To make estimations easier let's assume the current draw is 500 mA.
Assuming that 1.0 Ah batteries and there are three of them this gives a total current capability of 3.0 Ah.
At 500 mA this give six hours of operation at Maximum current for one motor.
Note this is at 4 kHz so reasonably fast.It will be of interest that to see what happens with two stepper motors. In theory half of the current will be available for each motor so half the torque. This is because Current I understand is related to Torque.
This could steer the design towards having only two motors. However this removes the ability to turn on the spot and thus aim. Pros and cons.