 Apollo Timbers
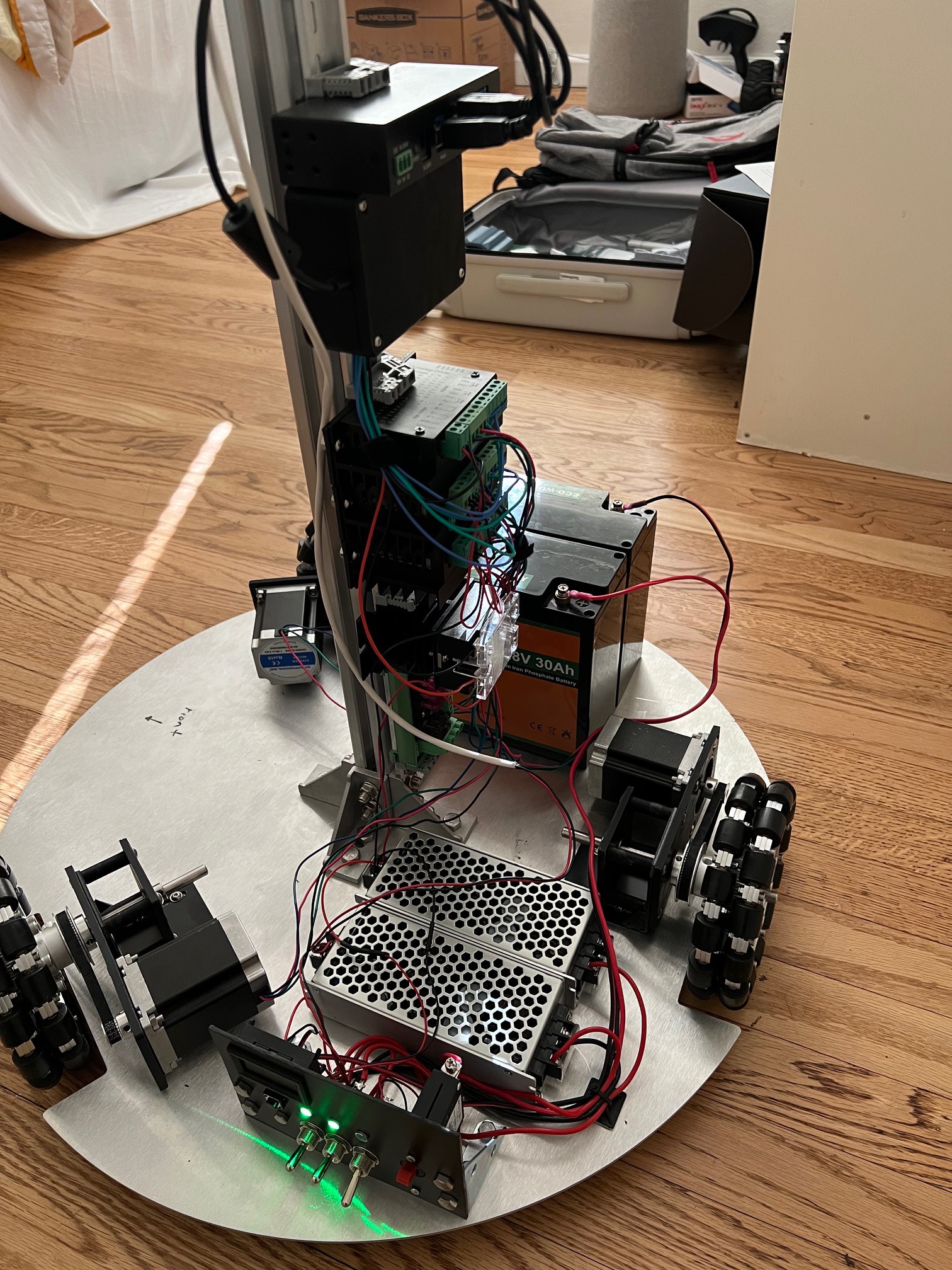
Apollo TimbersA lot of the build was done. All the subsystems minus the arm are installed.
- Power distribution finished out, wired and mounted. (third switch un-used currently)
- Motor drivers wired to PICO
- Motors wired to drivers
- Main stalk bolted down
- 12 volt and 24 volt DC to DC convertors mounted and tested
- 12 volt rail online, Looks ripple free with O-Scope
- 24 volt rail online, Looks ripple free with O-Scope
- Jetson TX2 powered via 12volt rail
- USB hub powered though 12 volt rail
- 24 volt wired though switching solid state relay then to stepper drivers
- Neck remounted with updated 3D printed piece
- Stand alone Vosk AI based voice assistance test completed
- Chat GPT 3.5 integrated
- Temporary Speaker installed
- Microphone temporarily installed
- Jumper installed on TX2 so it will boot up when power is applied


Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.