 Apollo Timbers
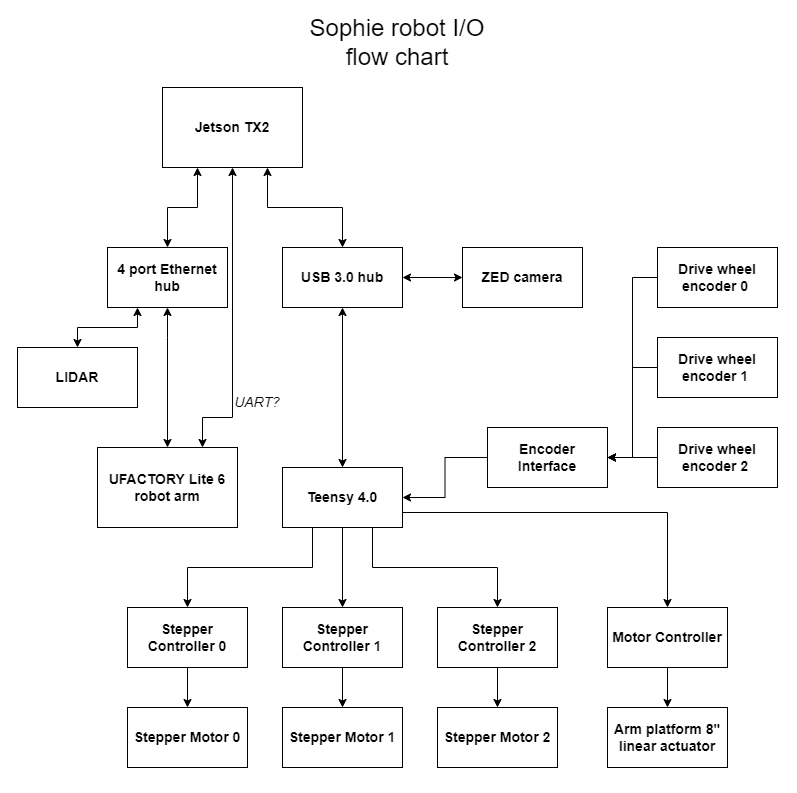
Apollo TimbersI made a bit of a goal for today to at least create the flow chart of I/O for the robot. As this is a prototype, please remember this is experimental and use at your own risk. That being said, I have created a Jetson powered robot before and I'm a bit more comfortable with the the architecture.
A power flow chart will also need to be created as with any robot it starts to get complicated. Having the charts makes it a bit easier to build and troubleshoot the robot later on.
For progress I have also printed some test pieces for the main drive units bearings and will post a bit about the drive units in the next project update.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.