 Apollo Timbers
Apollo TimbersI cleaned a bit of my lab up, well... at least mostly. I have a few projects on-going and finished ones around. Thought I'd post some pictures of it. Though, I was able to get another drive unit going today, and designed out the mounting solution for the stepper controllers and finished out the test bench head mount design. This will provide a way for the head to mounted in the correct orientation and start hooking up the main computer to the control subsystem and start the process of programming. Will need to start making some process on this will likely to get a rudimentary vison pipeline setup and a test to speech program. (Then the robot should be able to respond to external stimuli by reporting information via speech. See Fig 1.
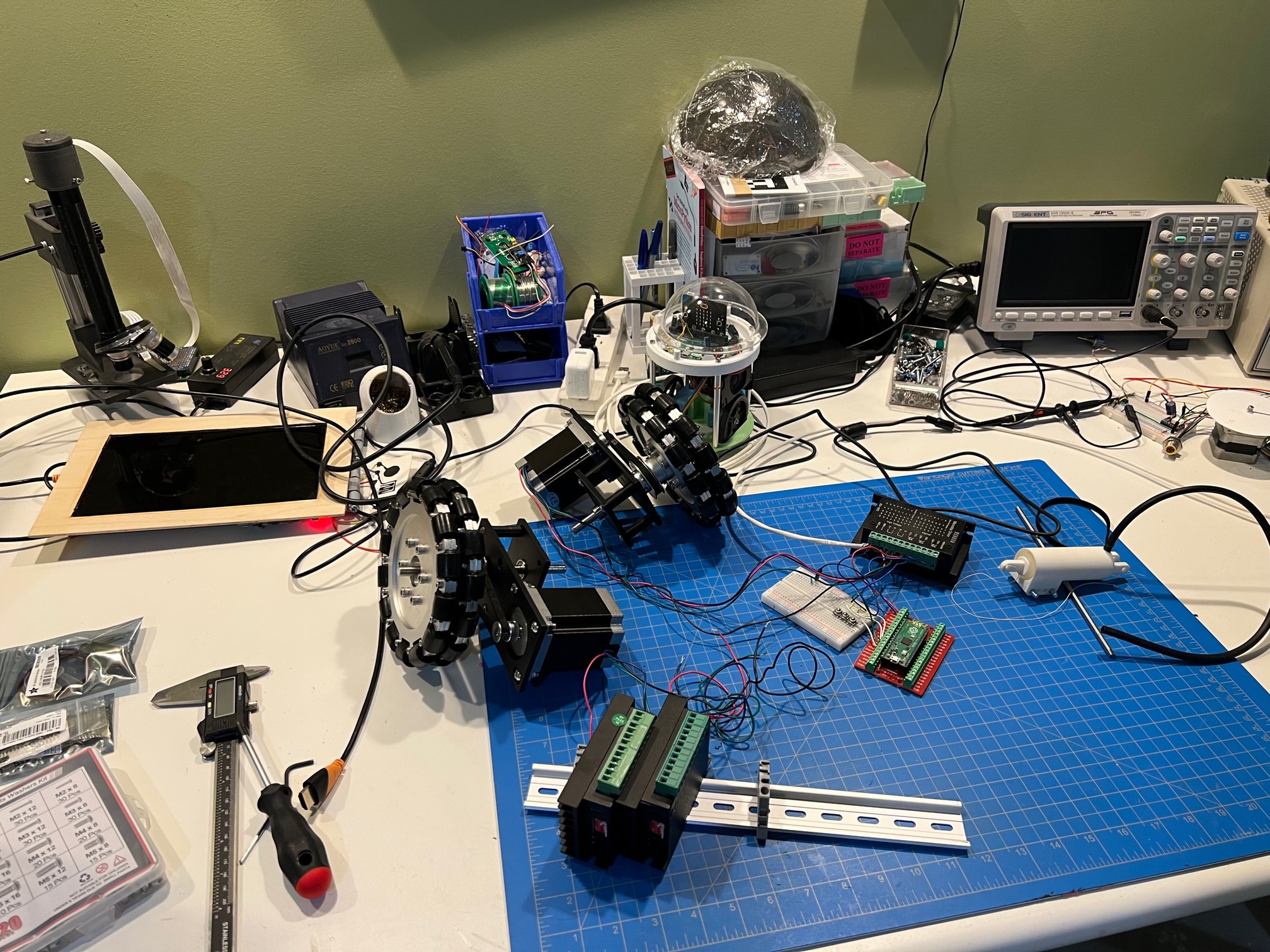
Currently, I have the plan of 3D printing the stepper mount then slide them onto a section of din rail. I also purchased some end stops as well to ensure everything stays in place. The din rail will be populated with stepper controllers, industrial USB 3 hub and Pi Pico that will be mounted to the central extruded aluminum v-rail. I'm keeping a eye out a bit for some nicer copper wire as I will likely make a wire bundle to connect them to the pi. Nice wire = expensive... :(
Lab photos Fig 2. and 3.
Fig 1.
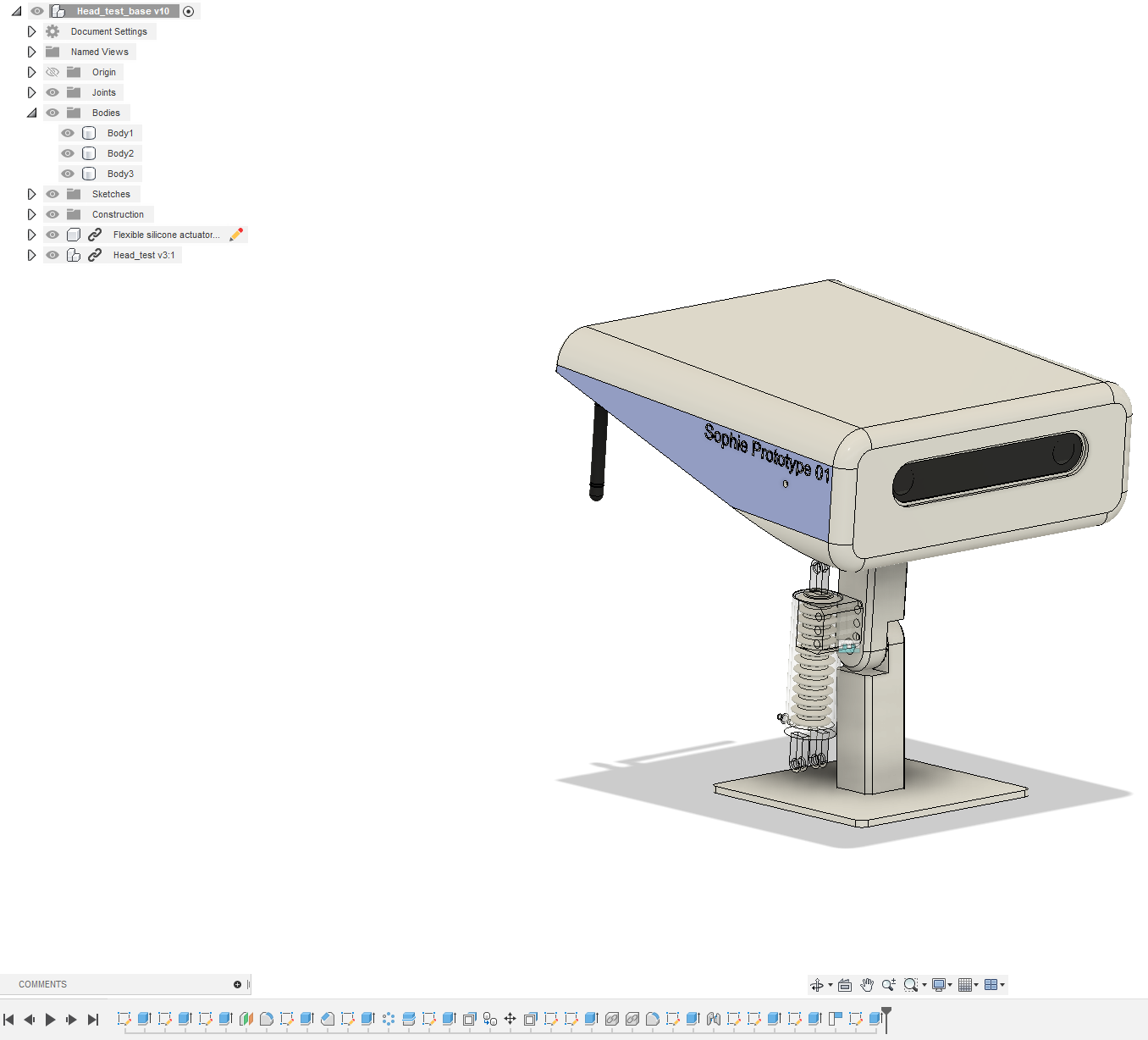
Fig 2. and 3.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.