 Andrea Piccinno
Andrea PiccinnoSince I had basically ready the shoulder module from the full body exoskeleton (still to be completed), I started a quick parallel development of an upper limb solution, very similar to commercial exoskeleton.
The aim will be, depending on the case, to support the user in keeping the arms either in front or up the head therefore relieving the shoulders.
In this design, contrarily to the full body one, the spine will be still (from above the sacrum) since it it intended for safety of the user. It still allows forward leaning but keeping the upper back straight.
Range of motion is full and support is provided by gas springs (design 1) or elastic bands (design 2).
Following video shows a preview of the design 1.
Many features are still missing here, as for example a cover bracket for the rods which will allow the user to carry a backpack without feeling it on the shoulders but rather on the hip (see picture below).

As soon as the design 2 is ready, I will start some testing by recording muscle activity with and without the exoskeleton.
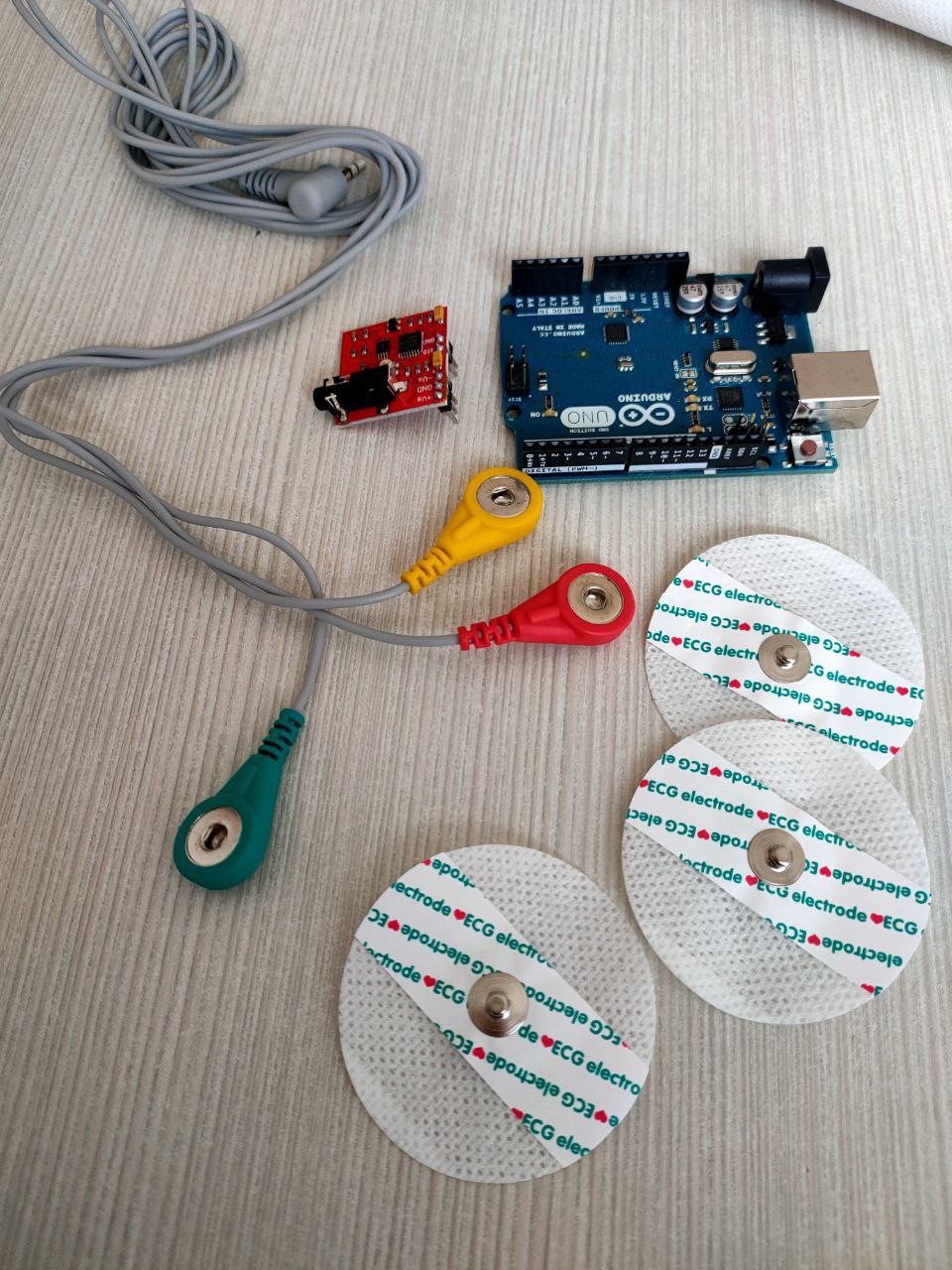
In order to do this I setup a very simple EMG project with Arduino that basically requires the following components:
Arduino UNO
AD8226-based EMG sensor
3 electrode pads
A 3-lead connecting cable
2 9V batteries
Connecting Wires & Jumper wires
In this way I should be able to ready muscle activity in order to compare it in the standard case and with the exoskeleton on.
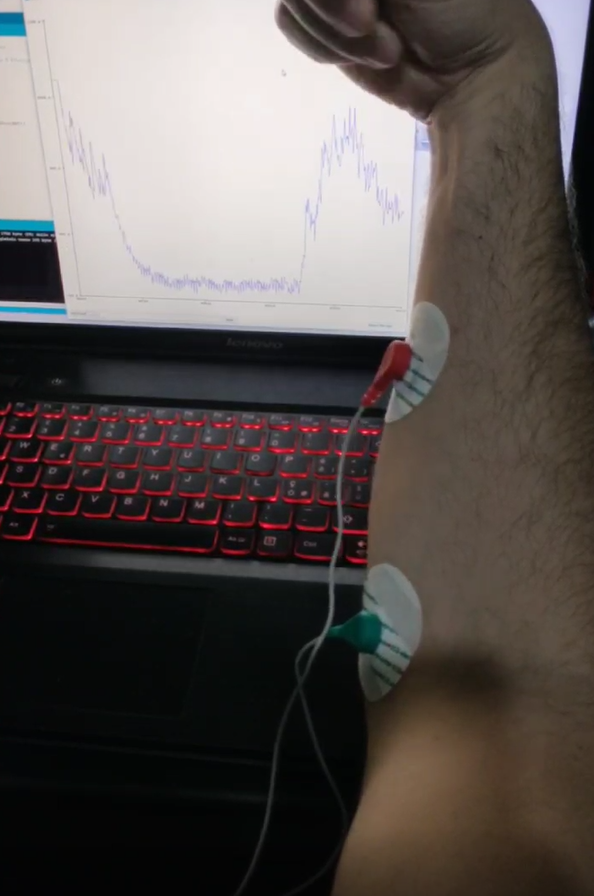
Updates about the Arduino code and the signal post processing code will follow as it's all work in progress.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.