 Samuk
SamukAt one end of https://rosmo-robot.github.io/ you'll spot a MikroBUS expansion header, the thinking with this is that this gives access to the ~1200 official MikroBus click boards
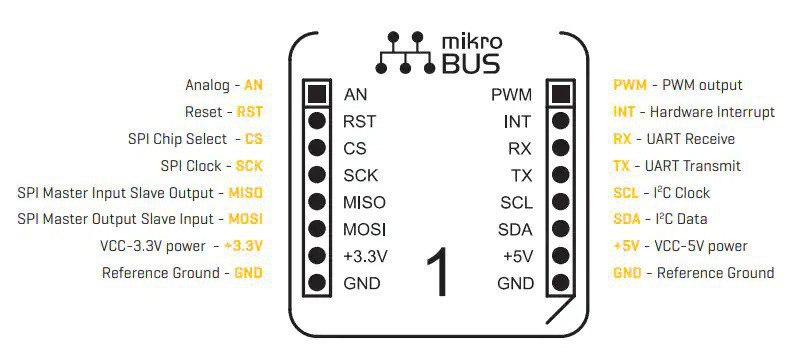
There is also scope for people to make expansion boards based on the very useful pinout.
I started having a play with one today, tackling the all important question of how to give this robot silly eyes.
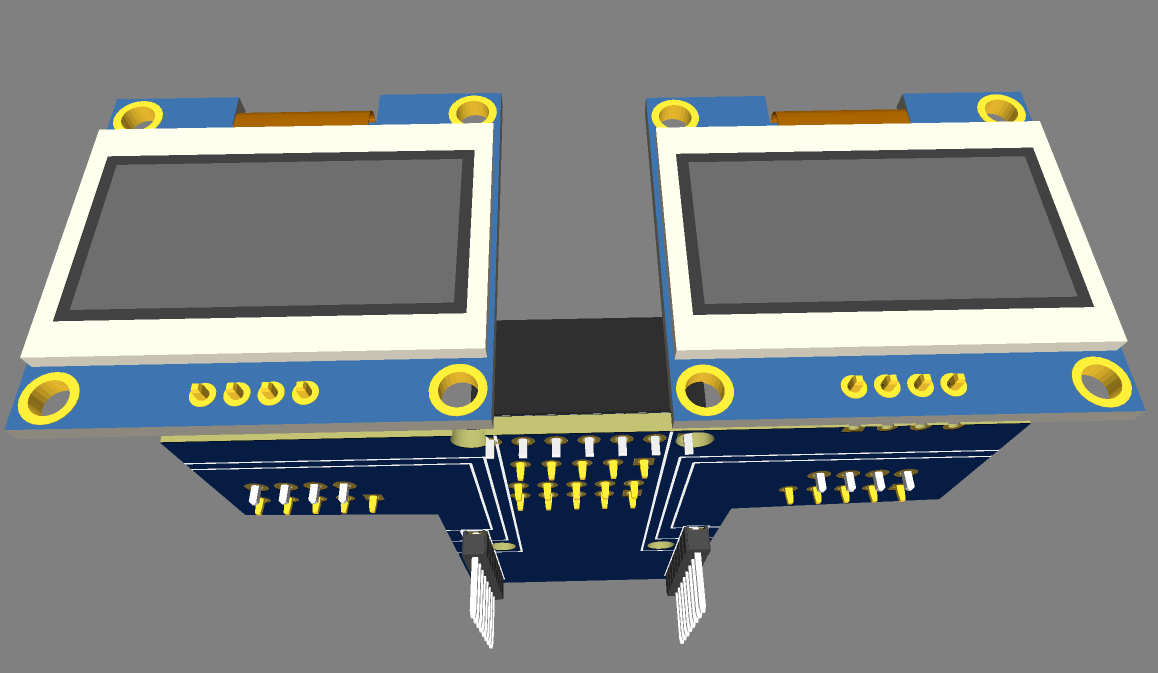
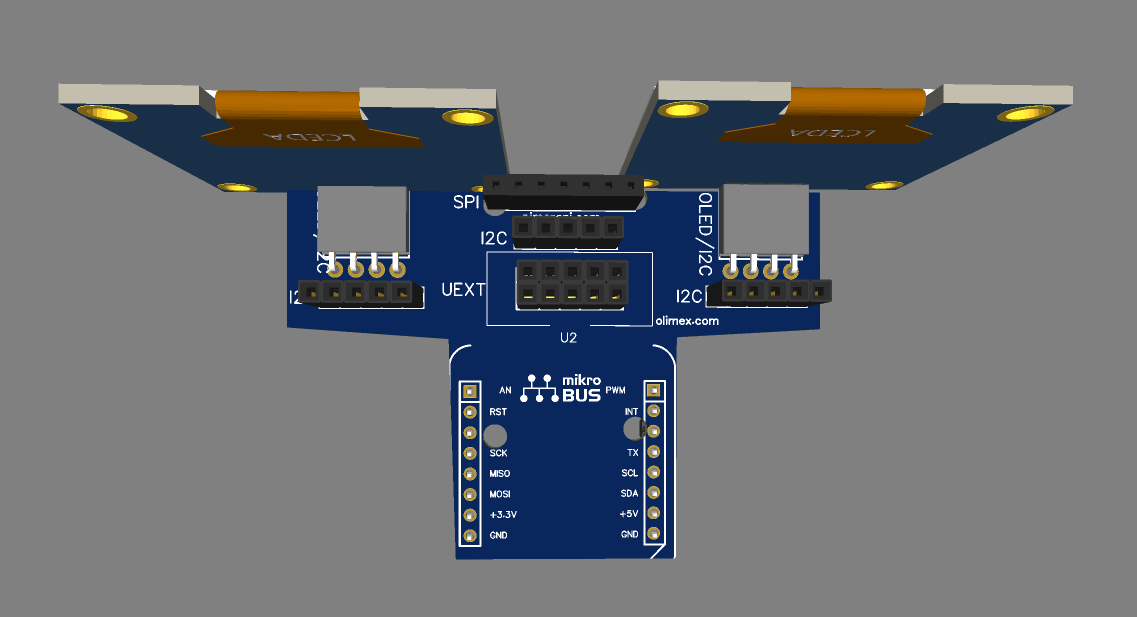
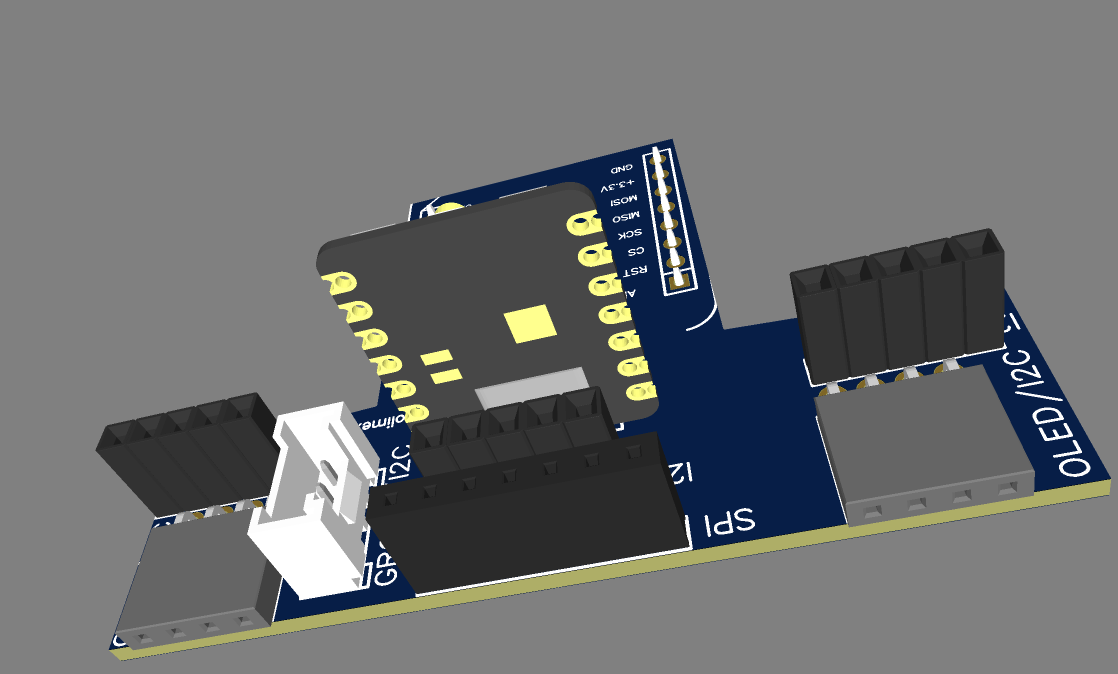
In the image below you'll see a bunch of interfaces;
- Pimoroni breakout garden I2C and SPI headers
- UEXT female header for the open hardware Olimex sensors
- Two I2C for the all important silly eyes OLED (haven't yet decided between the 1.3" or 1.5" pinout)
The MikroBus header compliments the on-board Qwiic and I2C breakout garden header as an attempt to navigate the I2C Zoo maybe I should stick a Grove on the breakout board to complete the menagerie..
This variant adds a Grove & Xiao camera for on board image processing
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.