 Samuk
Samuk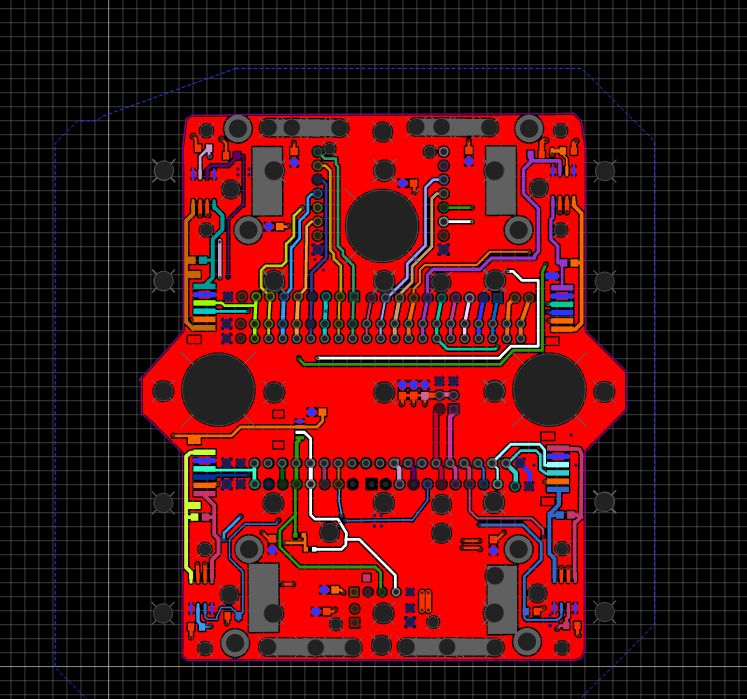
I spotted a ground island in the PCB so did yet another iteration
- Ground islands (hopefully!) removed
- Added a bunch of capacitors to smooth out the power
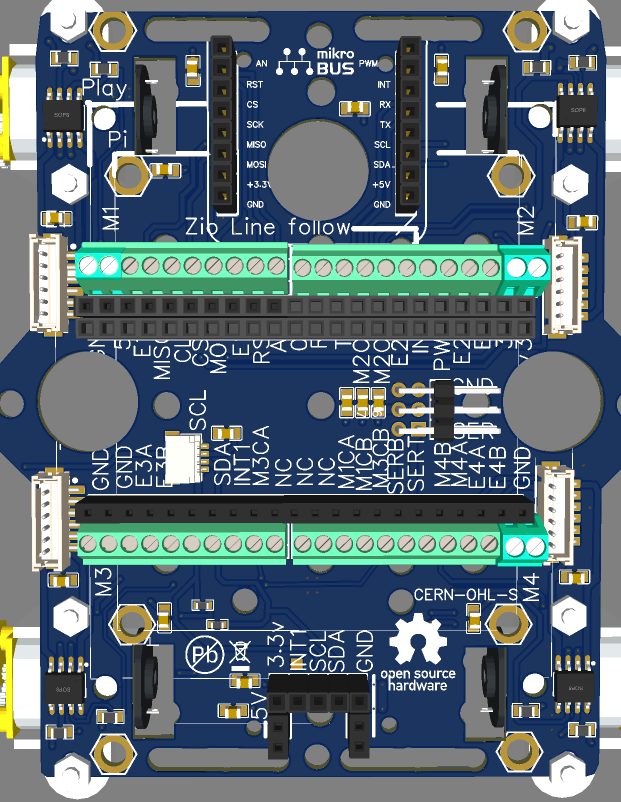
- Added a 5v header (bottom of the PCB) So you could plug in one of these USB-C connectors the idea is you could then add a USB powered Wifi/ AI camera
- Added extra female header so you could now use the Open hardware ESP32-S3 or the closed hardware ones that are a bit cheaper
- Bottom silkscreen tidied up a bit
- More: rosmo-robot.github.io/
![]()
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.