 Samuk
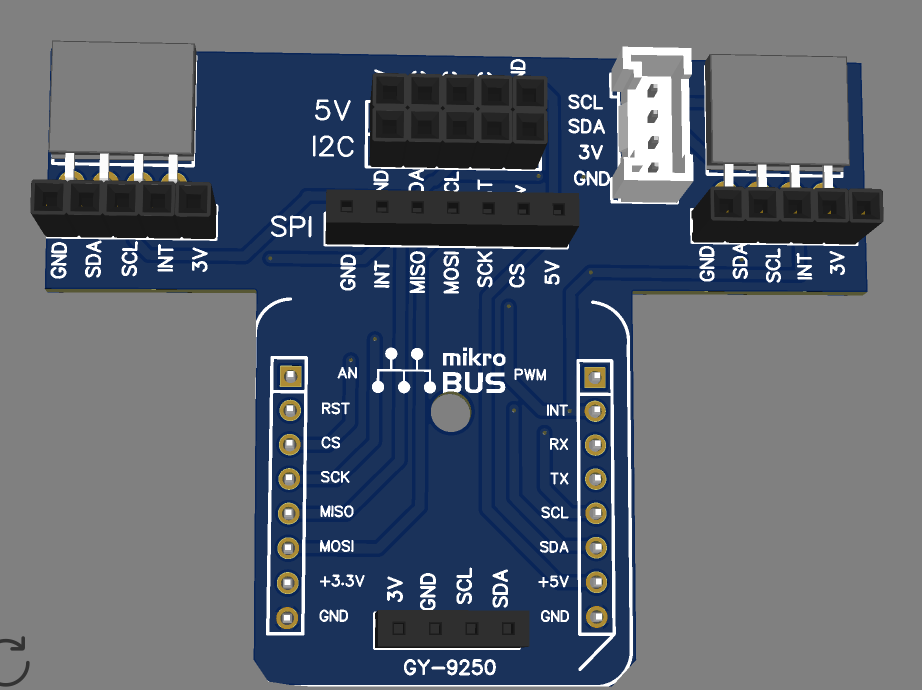
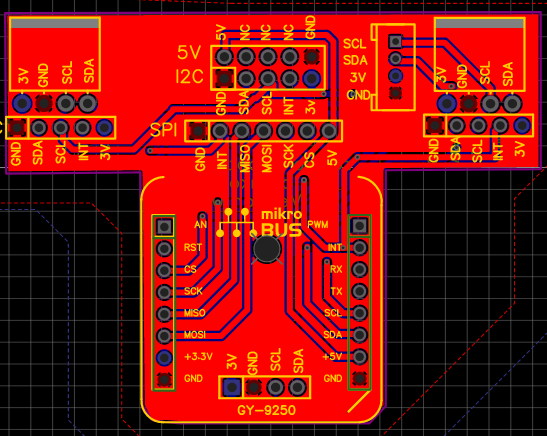
SamukI finished* routing the 'main' breakout board
I also did one with a Wemos(ish) footprint
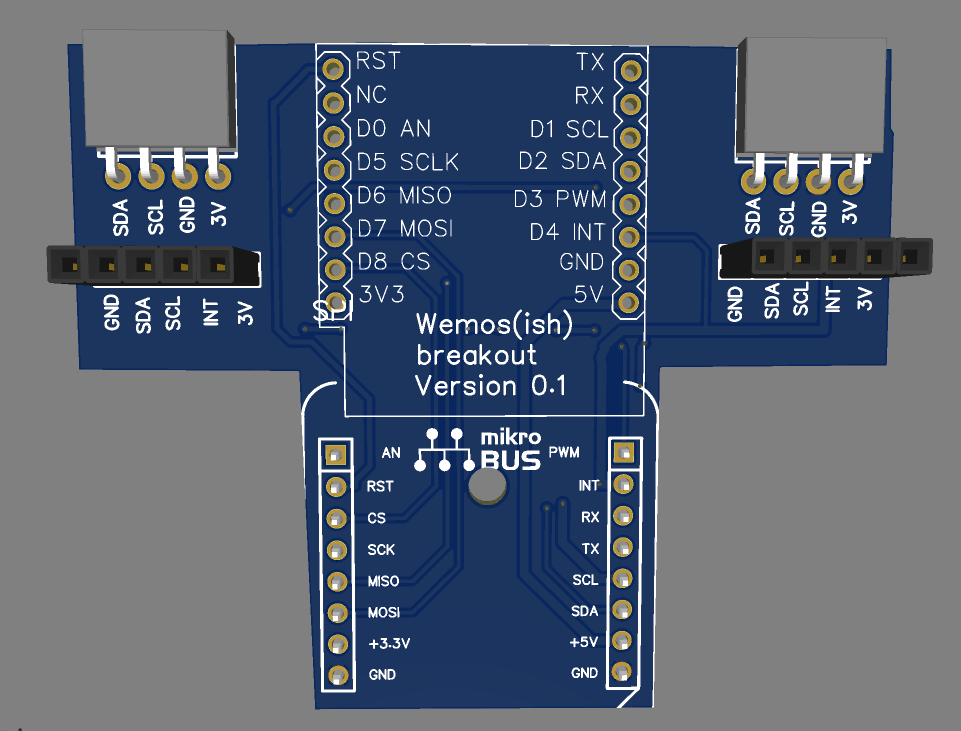
Both of these are designed to connect to the Mikrobus header on https://rosmo-robot.github.io/
* It's not actually finished, I just haven't spotted the errors yet
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.