Have I got results for you!
To calibrate the system I needed a way to do scripts. Move X forward, turn Y right, wait T, repeat i, etc.
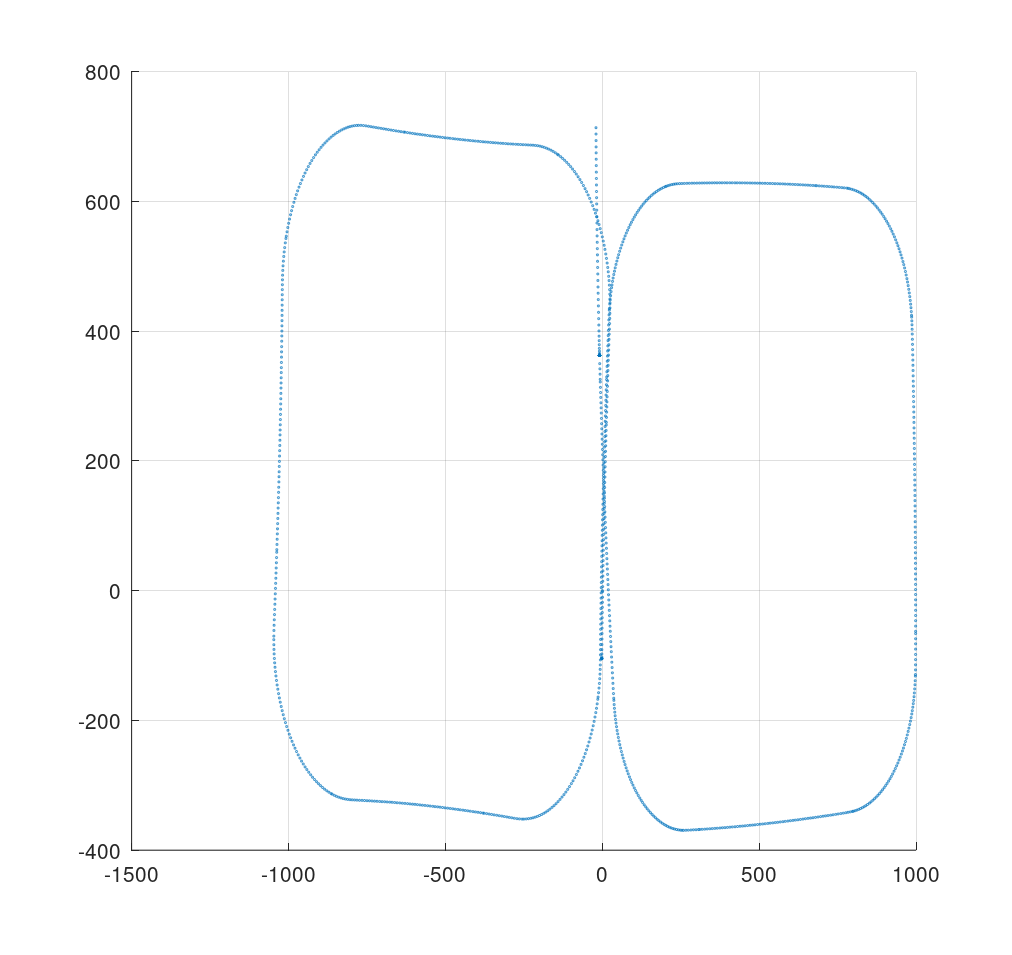
To get calibration data, drive a figure 8, two squares. First leg should have the same heading as the last leg. Like this!:
I'm pretty proud of the fruits of my labour. First, the ability to do "scripting":
int Roomba632::ScriptHandler(){
int16_t velocity, radius;
uint8_t scriptDistance, scriptAngle, scriptTime;
static uint8_t scriptRepeat;
static int scriptState, p_programCounter; //program counter for scripts;
static unsigned long scriptTimer, waitingTime;
switch (scriptState){
case RMIdle: //0
if (p_startScriptFlag){
p_startScriptFlag = false;
scriptState = RMStart;
}
break;
case RMStart: //1
Serial.write(OCstart);
scriptTimer = millis();
scriptState = RMStarting;
break;
case RMStarting://2
if ((millis() - scriptTimer) > COMMANDSTARTTIMEOUT){
Serial.write(OCSafemode);
p_programCounter= 0; //Reset script
scriptState = p_scriptPointer[p_programCounter];
scriptTimer = millis();
}
break;
case RMHalt: //3 scriptable
if ((millis() - scriptTimer) > COMMANDMODETIMEOUT){
Serial.write(OCStop);
scriptTimer = millis();
scriptState = RMHalting;
}
break;
case RMHalting: //4
if((millis() - scriptTimer) > COMMANDSTARTTIMEOUT){
p_programCounter = 0;
scriptState = RMIdle;
}
break;
case RMDriveF: //5 scriptable verb + noun
if ((millis() - scriptTimer) > COMMANDMODETIMEOUT){
scriptDistance = p_scriptPointer[p_programCounter + 1]; //Distance in steps of 25mm (gives maximum of 6.375m)
waitingTime = scriptDistance * DISTANCESCALAR;
velocity = 250; //mm/s
radius = 32767; //Drive straight
SendDriveCommand(velocity, radius);
scriptTimer = millis();
scriptState = RMDrivingF;
}
break;
case RMDrivingF://6
if((millis() - scriptTimer) > waitingTime){
p_programCounter = p_programCounter + 2;
scriptState = p_scriptPointer[p_programCounter];
scriptTimer = millis();
debugVal = scriptState;
}
break;
case RMDriveR: //7 scriptable verb + noun
if ((millis() - scriptTimer) > COMMANDMODETIMEOUT){
scriptDistance = p_scriptPointer[p_programCounter + 1]; //Distance in steps of 25mm (gives maximum of 6.375m)
waitingTime = scriptDistance * DISTANCESCALAR;
velocity = -250; //mm/s
radius = 32767; //Drive straight
SendDriveCommand(velocity, radius);
scriptTimer = millis();
scriptState = RMDrivingR;
}
break;
case RMDrivingR://8
if((millis() - scriptTimer) > waitingTime){
p_programCounter = p_programCounter + 2;
scriptState = p_scriptPointer[p_programCounter];
scriptTimer = millis();
}
break;
case RMTurnL: //9 scriptable verb + noun
if ((millis() - scriptTimer) > COMMANDMODETIMEOUT){
scriptAngle = p_scriptPointer[p_programCounter +1]; //Angle in 256 steps for full circle (quarter turn = 64)
waitingTime = scriptAngle * TURNINGSPEED;//quarter turn should give 1570ms
velocity = 256; //mm/s
radius = 256; //radius in mm's
SendDriveCommand(velocity, radius);
scriptTimer = millis();
scriptState = RMTurningL;
}
break;
case RMTurningL://10
if((millis() - scriptTimer) > waitingTime){
p_programCounter = p_programCounter + 2;
scriptState = p_scriptPointer[p_programCounter];
scriptTimer = millis();
}
break;
case RMTurnR: //11 scriptable verb + noun
if ((millis() - scriptTimer) > COMMANDMODETIMEOUT){
scriptAngle = p_scriptPointer[p_programCounter +1]; //Angle in 256 steps for full circle (quarter turn = 64)
waitingTime = scriptAngle * (TURNINGSPEED);//quarter turn should give 1570ms
velocity = 256 - TURNINGOFFSET; //mm/s
radius = -256; //radius in mm's
SendDriveCommand(velocity, radius);
scriptTimer = millis();
scriptState = RMTurningR;
}
break;
case RMTurningR://12
if((millis() - scriptTimer) > waitingTime){
p_programCounter = p_programCounter + 2;
scriptState = p_scriptPointer[p_programCounter];
scriptTimer = millis();
}
break;
case RMWait: //13 scriptable verb + noun
if ((millis() - scriptTimer) > COMMANDMODETIMEOUT){
SendDriveCommand(0, 0);
scriptTime = p_scriptPointer[p_programCounter +1]; //Wating time in steps of 128ms for maximum wating time of ~32,5 seconds
waitingTime = scriptTime * 128;
scriptState = RMWaiting;
scriptTimer = millis();
}
break;
case RMWaiting: //14
if((millis() - scriptTimer) > waitingTime){
p_programCounter = p_programCounter + 2;
scriptState = p_scriptPointer[p_programCounter];
scriptTimer = millis();
}
break;
case RMGoto: //15 Will go on forever!
p_programCounter = p_scriptPointer[p_programCounter + 1];
scriptState = p_scriptPointer[p_programCounter];
scriptTimer = millis();
break;
case RMRepeat: //16 repeat for total of numbered runs
if (scriptRepeat == 0){
scriptRepeat = p_scriptPointer[p_programCounter + 1];
scriptState = p_scriptPointer[0];
}
else if(scriptRepeat != 1){
scriptRepeat--;
scriptState = p_scriptPointer[0];
}
else if(scriptRepeat == 1){
scriptState = RMHalt;
}
p_programCounter = 0;
scriptTimer = millis();
break;
default:
//Reset
scriptState = RMHalt;
break;
}
return scriptState;
}
void Roomba632::SendDriveCommand(int16_t velocity, int16_t radius){
Serial.write(OCDrive);
Serial.write(velocity >> 8);
Serial.write(velocity);
Serial.write(radius >> 8);
Serial.write(radius);
}It's using pointers and everything! (It's added to the newly uploaded library files. Update includes much more improvements. All timers are now overflow proof etc)
With this, I can run the following script:
uint8_t Square[35] = {
RMDriveF, 20, //50cm
RMTurnL, 64, //quarter turn L
RMDriveF, 20, //50cm
RMTurnL, 64, //quarter turn L
RMDriveF, 20, //50cm
RMTurnL, 64, //quarter turn L
RMDriveF, 20, //50cm
RMTurnL, 64, //quarter turn L
RMDriveF, 20, //50cm
RMTurnR, 64, //quarter turn R
RMDriveF, 20, //50cm
RMTurnR, 64, //quarter turn R
RMDriveF, 20, //50cm
RMTurnR, 64, //quarter turn R
RMDriveF, 20, //50cm
RMTurnR, 64, //quarter turn R
RMDriveF, 20, //50cm
RMHalt //Stop
};Of course, this didn't give me a the correct result right away. I was able to bracket the values until I got the figure eight I was looking for. Some specialised callibrationtape on the floor to compare starting and finishing position and heading.
Then, log the data for post processing:
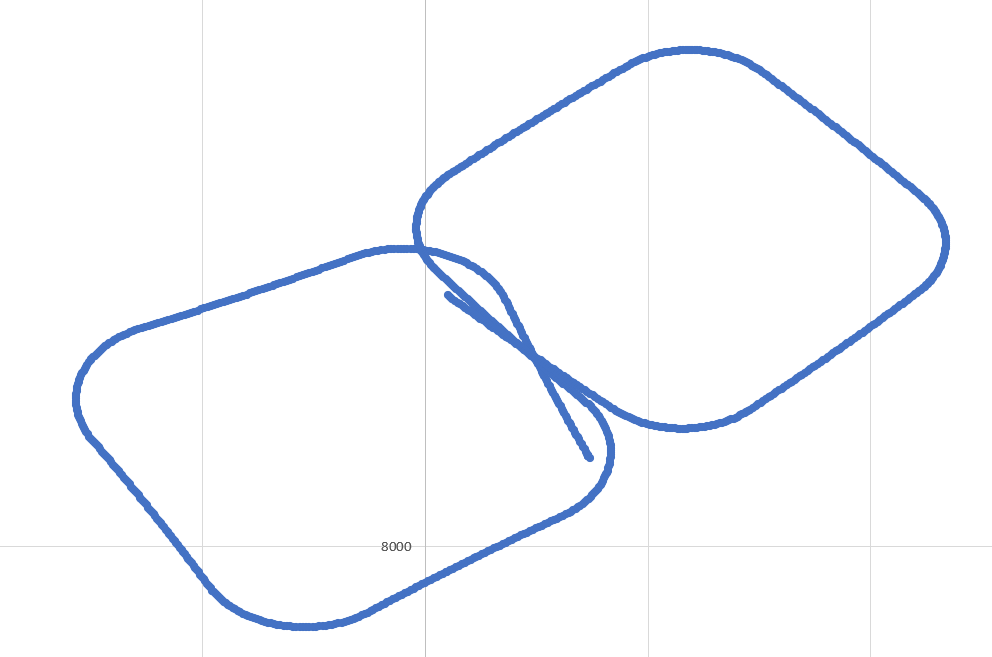
X, Y data calculated real time by the ESP8266, logged via MQTT and viewed in Excel:

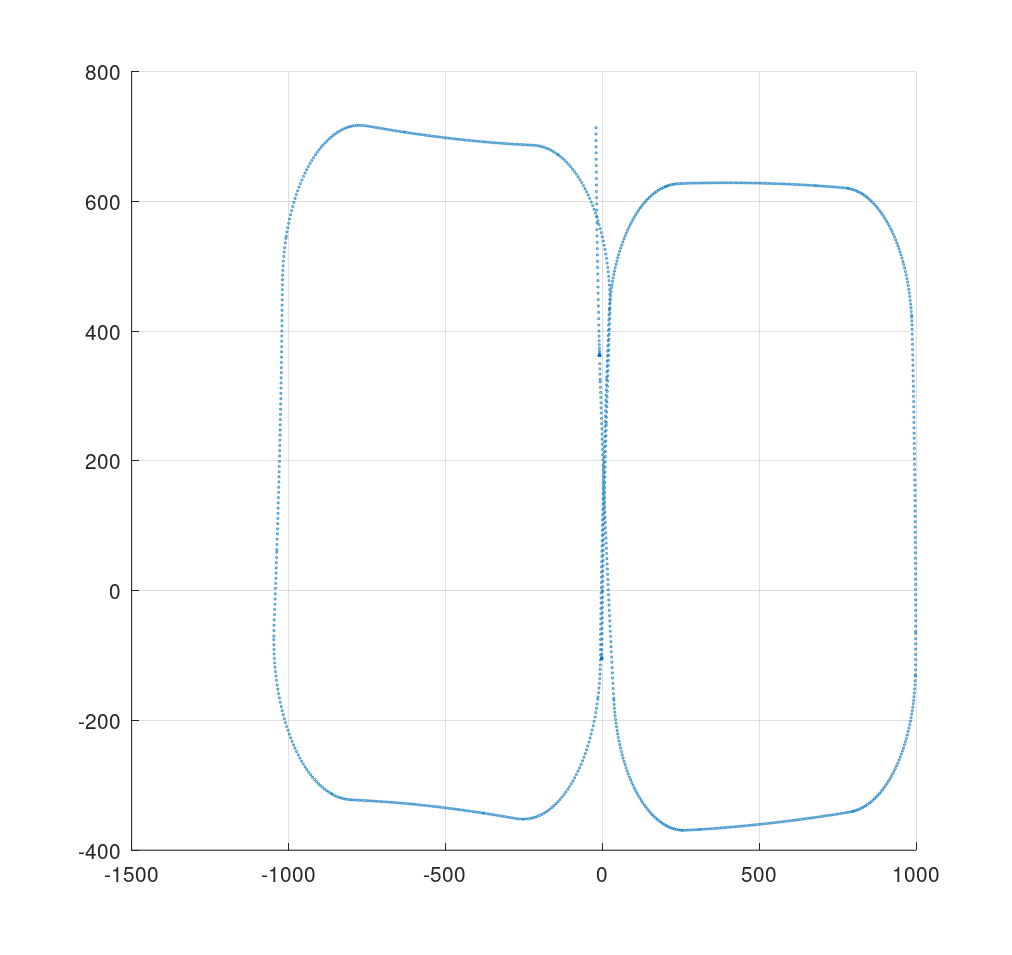
Now, I can do post-processing on the data in Octave to see if I can improve:
Raw, post-process:
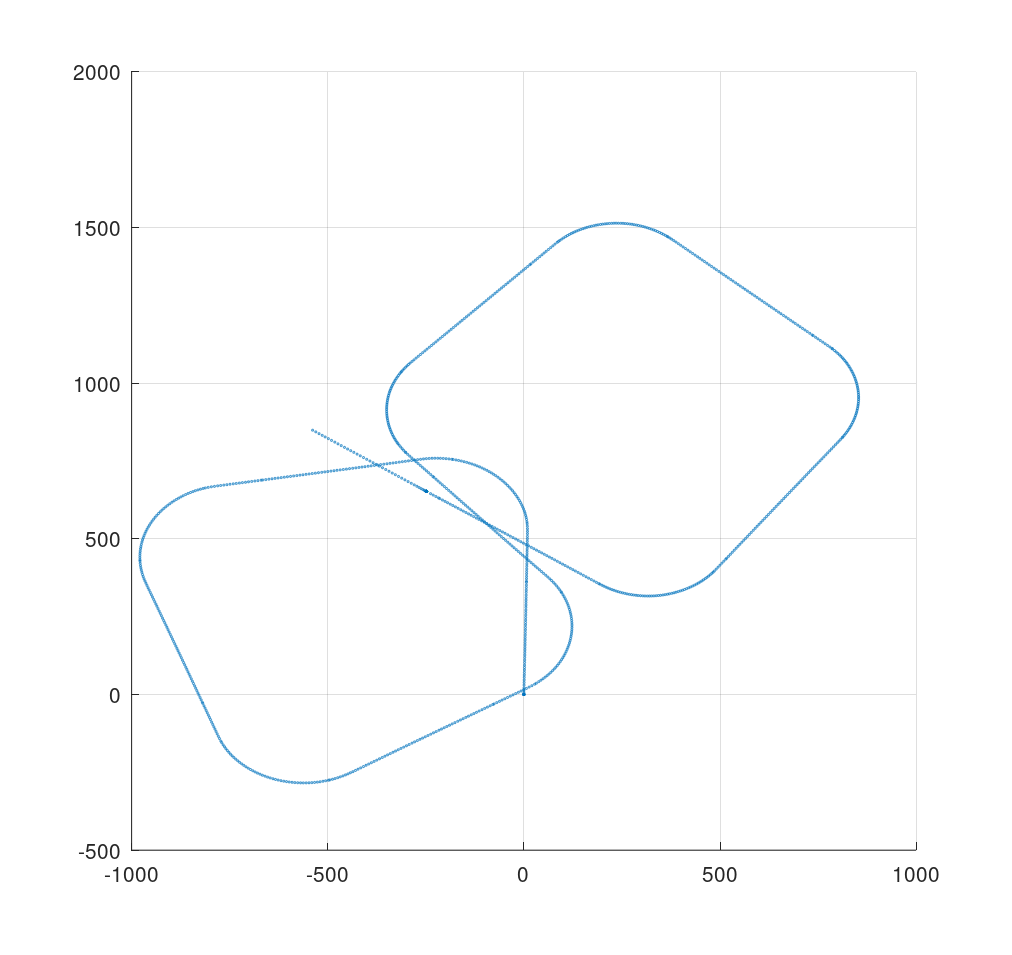
Best result:
Now, I have calibrated values to use onboard for post-process AND real-time positioning. Updating the lib, with these values:
Maybe I'll do some more tweaking, but I don't think I'll get it much better than this. There are limits to the accuracy of the system. For better results, I'll have to integrate the IMU data.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.