We're closing the loop!
While I'm waiting on some stuff to make the Roomba run more stable (guess what, I'ts POWER-ISSUES!), I'm checking off the next thing on my to-do list. That's charting Roomba's travels post-process. And look at the results!:
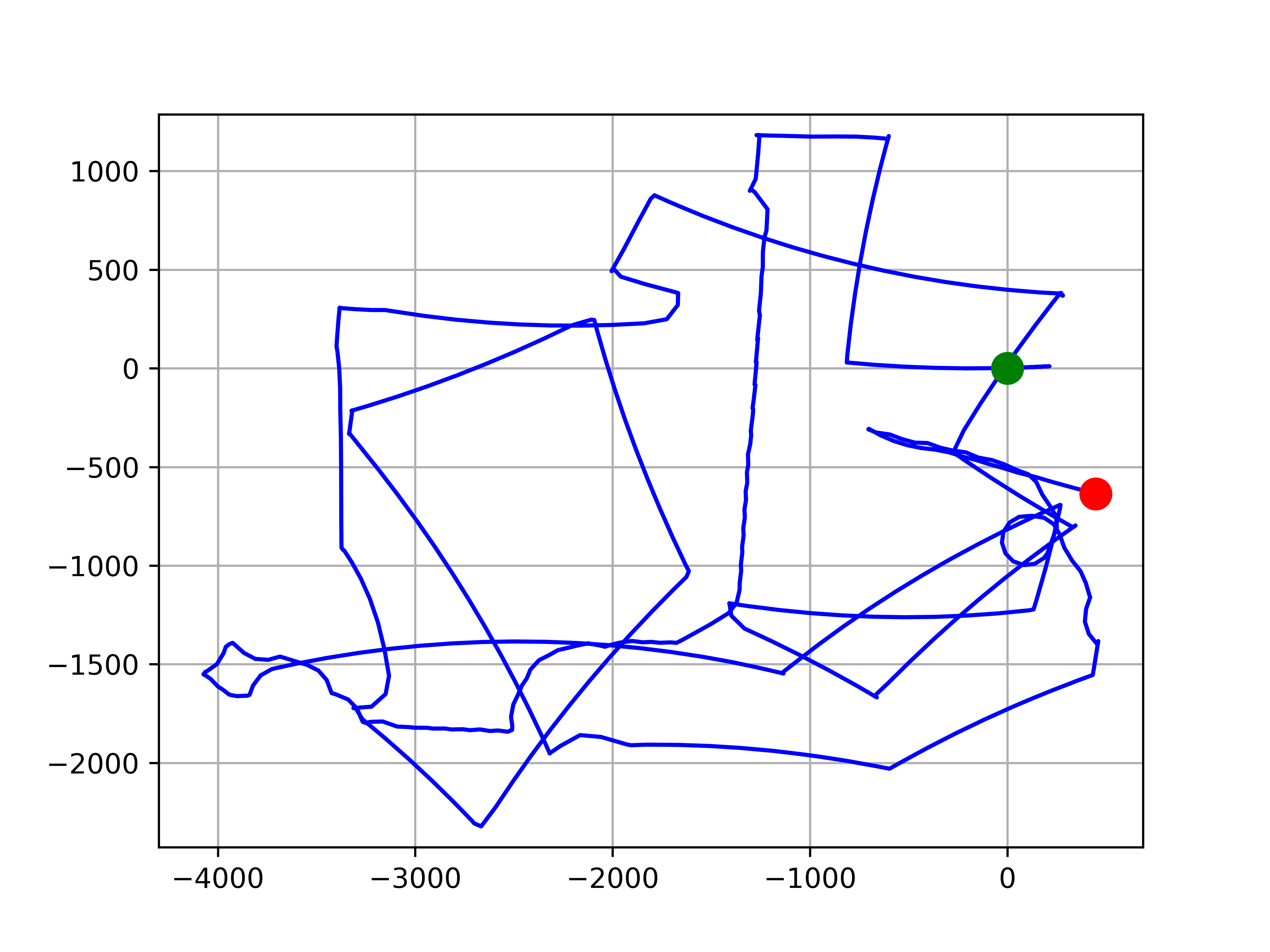
Raw:

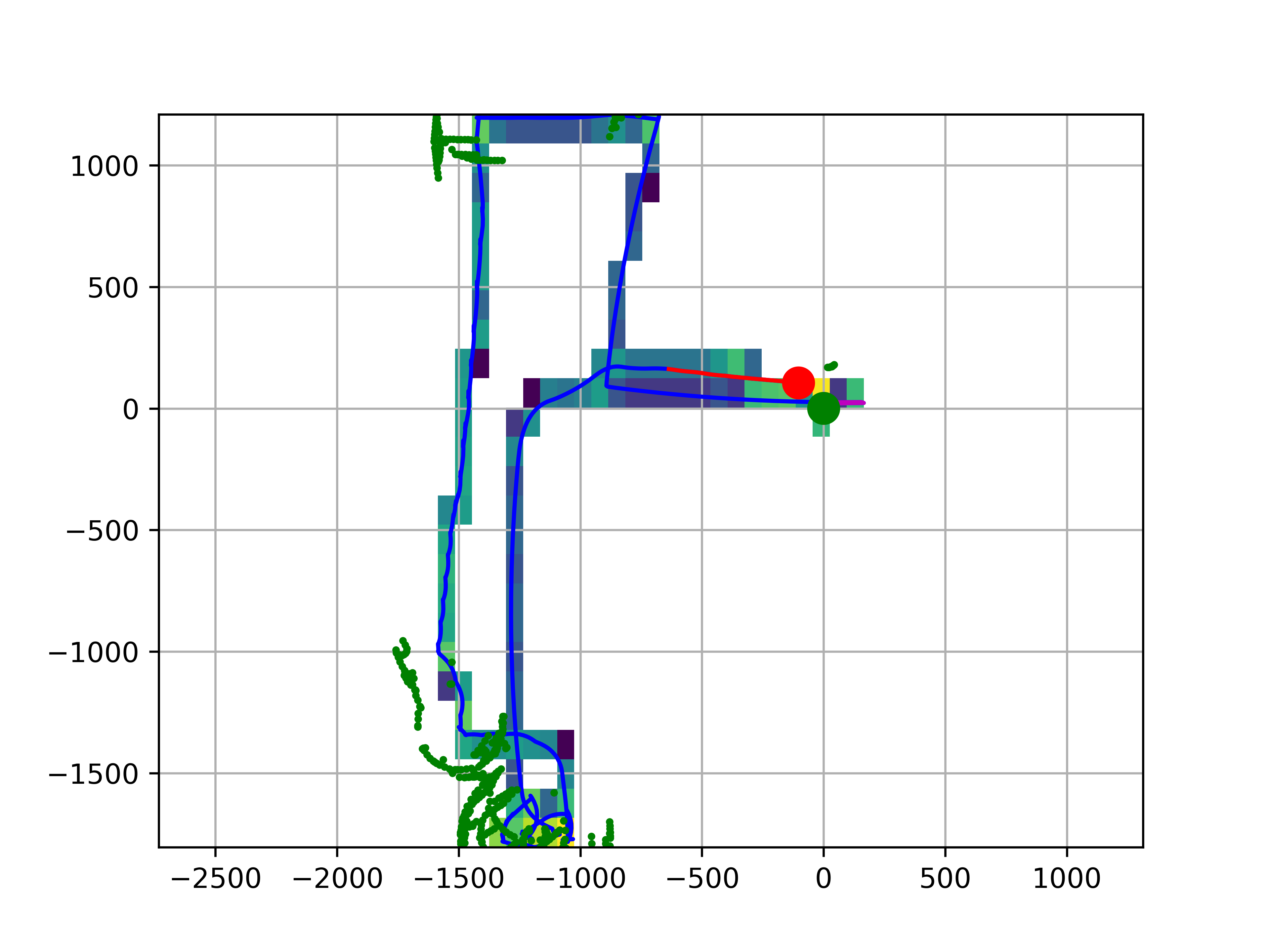
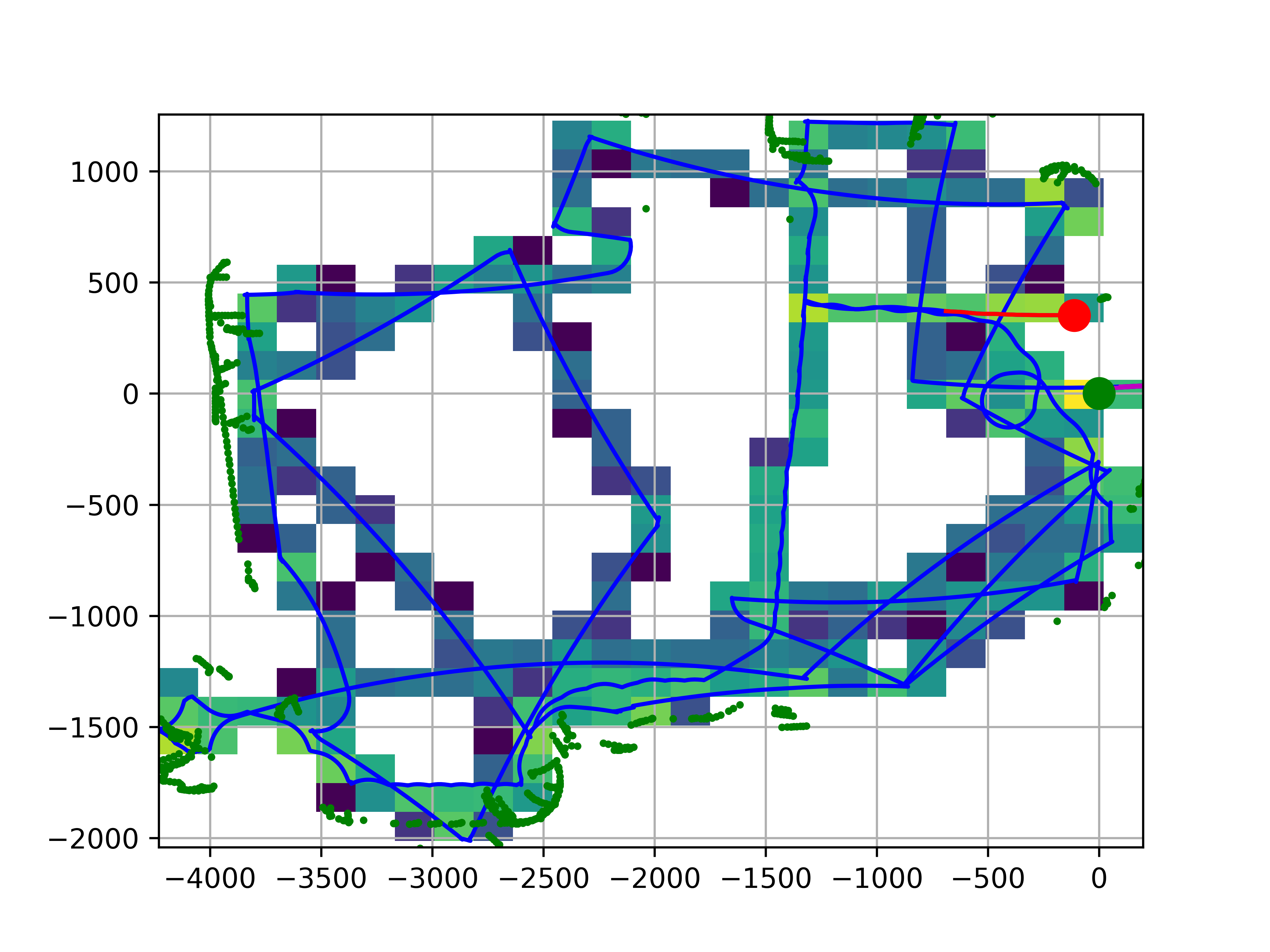
Post-Processed:
I already had a python script running as a daemon on a raspberry pi. This listens to published events and data on the MQTT-broker (running on Home Assistant).
There are two important events to listen to: start-run & end-run.
Then there are two data-streams. 1 pose-data calculated real-time by the Roomba. This has X,Y coordinates that are used for a live map.
2. Raw data containing motorencoder data, real-world yaw by the MPU (for now) and stuff like light-bumpers for wall detection. These values are recorded to a logfile, later used in post-process.
The positional data is used as a first approximation. The starting & ending position is both on the charging dock. Same position and same pose. This means a closed loop and therefore a loop closing error to correct.
The first few positions are used to get a starting angle. The last few positions as a ending angle (as a rolling average).
As long as the total accumulated drift is less than half a full circle, the difference between starting and ending angle can be linearly "smeared" out over the recorded yaw-values when post-processing.
The same can be done with starting and ending coordinate.
Python gives some output:
start run
Started mapping run
end run
Full run is complete. Save logfile and start postprocess
2558 lines recorded
Average opening Theta: 0.00093772
Average closing Theta: -0.19936671270879255
Closing error: 0.20030443270879256
Error correction: 7.830509488224884e-05
dX: 487.2798 dY: -646.4786
Using both angle and coordinate correction is a bit too much.
So now I'm experimenting with full angle correction and half of the coordinate correction. We'll see after more runs :)
Full python script:
#!/usr/bin/env python
# (c) 2022-09-06 S.E.Jansen.
# MQTT-layer for Roomba logging
# Listen for the start and stop of cleaning event
# Log raw and positional data to file
# Loop closing and error correction on positional data
# Render map from positional data as a imagefile
# Post imagefile to camera entity for Home Assistant
# Log wall sensors
# Render image from postprocess
# Render walls in postprocess image
import time
import datetime
import MQTT_Config
import json
import paho.mqtt.client as paho
import csv
import matplotlib.pyplot as plt
import matplotlib.colors as col
import io
import numpy as np
#Roomba device info for Home Assistant autoconfig
DeviceName = 'Roomba632'
DeviceID = '01'
DeviceManufacturer = 'iRobot'
DeviceModel = '632'
DISTANCEPERCOUNTL = 0.4525 #(pi * 72.0 / 508.8) mm / count
DISTANCEPERCOUNTR = 0.4400 #(pi * 72.0 / 508.8) mm / count
WHEELDISTANCE = 247.0 #mm center wheel <-> center wheel
fieldnames = ['EncoderLeft','EncoderRight','Theta','AccelX','AccelY','GyroYaw','LightBumperLeft','LightBumperFrontLeft', 'LightBumperCenterLeft','LightBumperCenterRight','LightBumperFrontRight','LightBumperRight']
PosXdata, PosYdata = [], []
WallXdata, WallYdata = [], []
StartXdata, StartYdata = [], []
EndXdata, EndYdata = [], []
linecount = 0
sum_closing_theta = 0
sum_opening_theta = 0
closing_error = 0
error_correction = 0
PreviousEncoderLeft = 0
PreviousEncoderRight = 0
Theta = 0
PosXcoo = 0
PosYcoo = 0
WallXcoo = 0
WallYcoo = 0
poseLogFilename = './Roomba/Logs/poseDummy'
poseLogFile = open(poseLogFilename + ".csv", 'w')
poseLogWriter = csv.writer(poseLogFile)
rawLogFilename = './Roomba/Logs/rawDummy'
rawLogFile = open(rawLogFilename + ".csv", 'w')
rawLogWriter = csv.writer(rawLogFile)
liveFeedCounter = 0
Xdata, Ydata = [], []
#MQTT callback functions
def on_message(client, userdata, message):
data = message.payload
global poseLogFilename
global poseLogFile
global poseLogWriter
global rawLogFilename
global rawLogFile
global rawLogWriter
global liveFeedCounter
global Xdata,Ydata
global PosXdata, PosYdata
global WallXdata, WallYdata
global StartXdata, StartYdata
global EndXdata, EndYdata
global linecount
global sum_closing_theta
global sum_opening_theta
global PreviousEncoderLeft
global PreviousEncoderRight
global Theta
global PosXcoo
global PosYcoo
global WallXcoo
global WallYcoo
if message.topic == MQTT_Config.HA_name + "/device_automation/" + DeviceName + "_" + DeviceID + "/event_StartRun":
event=data.decode("utf-8")
print(event)
# start logging
if event == "start run":
#reset values
linecount = 0
sum_closing_theta = 0
sum_opening_theta = 0
PosXdata, PosYdata = [], []
WallXdata, WallYdata = [], []
StartXdata, StartYdata = [], []
EndXdata, EndYdata = [], []
PreviousEncoderLeft = 0
PreviousEncoderRight = 0
Theta = 0
PosXcoo = 0
PosYcoo = 0
WallXcoo = 0
WallYcoo = 0
liveFeedCounter = 0
Xdata, Ydata = [], []
# open logfile
print("Started mapping run")
poseLogFile.close()
poseLogFilename = "./Roomba/Logs/" + datetime.datetime.now().isoformat('_', 'seconds') + "_pose"
poseLogFile = open(poseLogFilename + ".csv", 'w')
poseLogWriter = csv.writer(poseLogFile)
rawLogFile.close()
rawLogFilename = "./Roomba/Logs/" + datetime.datetime.now().isoformat('_', 'seconds')+ "_raw"
rawLogFile = open(rawLogFilename + ".csv", 'w')
rawLogWriter = csv.writer(rawLogFile)
if message.topic == MQTT_Config.HA_name + "/device_automation/" + DeviceName + "_" + DeviceID + "/event_EndRun":
event=data.decode("utf-8")
print(event)
# Stop logging
if event == "end run":
# close log
print("Full run is complete. Save logfile and start postprocess")
print(linecount, " lines recorded")
poseLogFile.close()
#poseLogFile = open('poseDummy.csv', 'w')
#poseLogWriter = csv.writer(poseLogFile)
rawLogFile.close()
#rawLogFile = open('rawDummy.csv', 'w')
#rawLogWriter = csv.writer(rawLogFile)
avg_opening_theta = sum_opening_theta / 50
print("Average opening Theta: ", avg_opening_theta)
avg_closing_theta = sum_closing_theta / 100
print("Average closing Theta: ", avg_closing_theta)
closing_error = avg_opening_theta - avg_closing_theta
if((0-np.pi) < closing_error < np.pi):
print("Closing error: ", closing_error)
error_correction = closing_error / linecount
print("Error correction: ", error_correction)
print("dX:", Xdata[-1], " dY:", Ydata[-1])
eX = (Xdata[-1] / linecount) /2
eY = (Ydata[-1] / linecount) /2
else:
print("Closing error out of range: ", closing_error)
error_correction = 0
with open(rawLogFilename + ".csv", newline='') as rawLogFile:
DictReader = csv.DictReader(rawLogFile, fieldnames)
#Apply error correction and plot to map:
for row in DictReader:
if(DictReader.line_num == 1):
PreviousEncoderLeft = np.int16(row['EncoderLeft'])
PreviousEncoderRight= np.int16(row['EncoderRight'])
EncoderLeft = np.int16(row['EncoderLeft'])
EncoderRight = np.int16(row['EncoderRight'])
DeltaEncoderLeft = EncoderLeft - PreviousEncoderLeft
DeltaEncoderRight = EncoderRight - PreviousEncoderRight
DistanceLeft = DISTANCEPERCOUNTL * DeltaEncoderLeft
DistanceRight = DISTANCEPERCOUNTR * DeltaEncoderRight
Distance = (DistanceLeft + DistanceRight) / 2
Theta += ((DistanceRight-DistanceLeft)/WHEELDISTANCE)
if(Theta > 6.28):
Theta -= 6.28
if(Theta < -6.28):
Theta += 6.28
PreviousEncoderLeft = EncoderLeft
PreviousEncoderRight = EncoderRight
#GyroYaw = Theta
GyroYaw = float(row['GyroYaw'])
GyroYaw += error_correction * DictReader.line_num
PosXcoo += Distance * np.cos(GyroYaw)
PosYcoo += Distance * np.sin(GyroYaw)
PosXcoo -= eX
PosYcoo -= eY
PosXdata.append(PosXcoo)
PosYdata.append(PosYcoo)
if (DictReader.line_num < 100):
StartXdata.append(PosXcoo)
StartYdata.append(PosYcoo)
if (DictReader.line_num > (linecount-100)):
EndXdata.append(PosXcoo)
EndYdata.append(PosYcoo)
if(row['LightBumperLeft'] == "True"):
WallXcoo = PosXcoo + (174.25 * np.cos(GyroYaw + 1.57))
WallYcoo = PosYcoo + (174.25 * np.sin(GyroYaw + 1.57))
WallXdata.append(WallXcoo)
WallYdata.append(WallYcoo)
#print("WallX:", WallXcoo, " WallY:", WallYcoo)
if(row['LightBumperFrontLeft'] == "True"):
WallXcoo = PosXcoo + (174.25 * np.cos(GyroYaw + 1.04))
WallYcoo = PosYcoo + (174.25 * np.sin(GyroYaw + 1.04))
WallXdata.append(WallXcoo)
WallYdata.append(WallYcoo)
#print("WallX:", WallXcoo, " WallY:", WallYcoo)
if(row['LightBumperCenterLeft'] == "True"):
WallXcoo = PosXcoo + (174.25 * np.cos(GyroYaw + 0.52))
WallYcoo = PosYcoo + (174.25 * np.sin(GyroYaw + 0.52))
WallXdata.append(WallXcoo)
WallYdata.append(WallYcoo)
#print("WallX:", WallXcoo, " WallY:", WallYcoo)
if(row['LightBumperCenterRight'] == "True"):
WallXcoo = PosXcoo + (174.25 * np.cos(GyroYaw - 0.52))
WallYcoo = PosYcoo + (174.25 * np.sin(GyroYaw - 0.52))
WallXdata.append(WallXcoo)
WallYdata.append(WallYcoo)
#print("WallX:", WallXcoo, " WallY:", WallYcoo)
if(row['LightBumperFrontRight'] == "True"):
WallXcoo = PosXcoo + (174.25 * np.cos(GyroYaw - 1.04))
WallYcoo = PosYcoo + (174.25 * np.sin(GyroYaw - 1.04))
WallXdata.append(WallXcoo)
WallYdata.append(WallYcoo)
#print("WallX:", WallXcoo, " WallY:", WallYcoo)
if(row['LightBumperRight'] == "True"):
WallXcoo = PosXcoo + (174.25 * np.cos(GyroYaw - 1.57))
WallYcoo = PosYcoo + (174.25 * np.sin(GyroYaw - 1.57))
WallXdata.append(WallXcoo)
WallYdata.append(WallYcoo)
#print("WallX:", WallXcoo, " WallY:", WallYcoo)
#print("Theta:", Theta, " Roomba:", row['Theta'], " GyroYaw:", row['GyroYaw'], " X:", PosXcoo, "Y:", PosYcoo)
# plot image from data
plt.savefig(poseLogFilename + "_raw.png", dpi=600,format='png')
plt.clf()
plt.axis('equal')
plt.grid(True)
plt.plot(PosXdata, PosYdata, linestyle='-', color='b')
plt.plot(StartXdata, StartYdata, linestyle='-', color='m', zorder=2.5)
plt.plot(EndXdata, EndYdata, linestyle='-', color='r', zorder=2.5)
plt.scatter(WallXdata,WallYdata, color='g', marker ='o', s=3, zorder=2.5)
plt.scatter(PosXdata[0],PosYdata[0], color='g', marker = 'o',s=120, zorder=2.5)
plt.scatter(PosXdata[-1],PosYdata[-1], color='r', marker = 'o',s=120, zorder=2.5)
plt.hist2d(PosXdata, PosYdata, bins=25, cmin=1, norm=col.LogNorm())
plt.savefig(poseLogFilename + ".png", dpi=600,format='png')
plt.close
# - publish map
poseLogImageFile = open(poseLogFilename+".png", "rb")
poseLogImageString = poseLogImageFile.read()
poseLogImageByteArray = bytes(poseLogImageString)
client.publish(MQTT_Config.HA_name + "/camera/" + DeviceName + "_" + DeviceID + "/map",poseLogImageByteArray,0,True)
if message.topic == MQTT_Config.HA_name + "/device/roomba/raw":
rawJson=json.loads(data.decode("utf-8"))
# start logging
if not rawLogFile.closed:
rawLogData = [rawJson['EL'],rawJson['ER'],rawJson['Th'],rawJson['Xa'],rawJson['Ya'],rawJson['Yw'],rawJson['LL'],rawJson['FL'],rawJson['CL'],rawJson['CR'],rawJson['FR'],rawJson['RR']]
rawLogWriter.writerow(rawLogData)
linecount += 1
#First 50 values
if (linecount <51):
sum_opening_theta += float(rawJson['Yw'])
#Last 100 values rolling average
sum_closing_theta -= (sum_closing_theta/100) + float(rawJson['Yw'])
else:
print("Raw logfile was closed")
if message.topic == MQTT_Config.HA_name + "/device/roomba/pose":
poseJson=json.loads(data.decode("utf-8"))
# start logging
if not poseLogFile.closed:
#poseLogData = [poseJson['X'],poseJson['Y'],poseJson['rTh']]
poseLogData = [poseJson['X'],poseJson['Y']]
poseLogWriter.writerow(poseLogData)
Xdata.append(poseJson['X'])
Ydata.append(poseJson['Y'])
#-every 10 seconds records?
liveFeedCounter=liveFeedCounter+1
if liveFeedCounter == 10:
liveFeedCounter = 0
plt.close()
plt.axis('equal')
plt.grid(True)
plt.plot(Xdata,Ydata,linestyle='-',color='b')
plt.scatter(poseJson['X'],poseJson['Y'], color='r', marker = 'o',s=120, zorder=2.5)
plt.scatter(Xdata[0],Ydata[0], color='g', marker = 'o',s=120, zorder=2.5)
img_buf = io.BytesIO()
plt.savefig(img_buf, dpi=50, format='png')
img_buf.seek(0)
poseLogImageString = img_buf.read()
poseLogImageByteArray = bytes(poseLogImageString)
client.publish(MQTT_Config.HA_name + "/camera/" + DeviceName + "_" + DeviceID + "/map",poseLogImageByteArray,0,False)
img_buf.close()
else:
print("Pose logfile was closed")
#call back function for MQTT connection
def on_connect(client, userdata, flags, rc):
if rc==0:
client.connected_flag=True #set flag
print("connected OK")
# Send autoconfig messages and subscribe to command topics
init()
else:
print("Bad connection Returned code=",rc)
client.bad_connection_flag=True
#call back function for disconnect MQTT connection to reconnect
#def on_disconnect
# MQTT Home Assistant autodiscover config and subscriptions
def init():
# MQTT autoconfig
device = {}
device['identifiers'] = DeviceName + "_" + DeviceID
device['name'] = DeviceName + "_" + DeviceID
device['manufacturer'] = DeviceManufacturer
#device['sw_version'] = ""
device['model'] = DeviceModel
# - Camera entity for maps
data = {}
data['name'] = "Map of last clean"
data['topic'] = MQTT_Config.HA_name + "/camera/" + DeviceName + "_" + DeviceID + "/map"
#data['availability_topic'] = MQTT_Config.HA_name + "/button/heos/" + HeosName + "_play/available"
#data['payload_available'] = 'yes'
#data['payload_available'] = 'no'
data['unique_id'] = DeviceName + "_" + DeviceID + "_Map"
data['icon'] = "mdi:map-outline"
data['device'] = device
client.publish(MQTT_Config.HA_name + "/camera/" + DeviceName + "_" + DeviceID + "/config",json.dumps(data),0,True)
# MQTT subscribe to command topics to receive commands
# - Start clean cycle:
client.subscribe(MQTT_Config.HA_name + "/device_automation/" + DeviceName + "_" + DeviceID + "/event_EndRun",0)
# - Event for ending of clean cylce:
client.subscribe(MQTT_Config.HA_name + "/device_automation/" + DeviceName + "_" + DeviceID + "/event_StartRun",0)
# - Positional data calculated on roomba:
client.subscribe(MQTT_Config.HA_name + "/device/roomba/pose",0)
# - Raw sensordata for postprocess calculation of position
client.subscribe(MQTT_Config.HA_name + "/device/roomba/raw",0)
# MQTT details
paho.Client.connected_flag=False #Create flag in class
paho.Client.bad_connection_flag=False #another flag
client= paho.Client() #create client object
client.username_pw_set(MQTT_Config.user,MQTT_Config.password)
client.on_connect=on_connect #bind call back function
#on disconnect?
client.on_message= on_message #attach function to callback
client.connect(MQTT_Config.broker,MQTT_Config.port) #establish connection
client.loop_start() #start network loop
while not client.connected_flag and not client.bad_connection_flag: #wait in loop
time.sleep(0.1)
if client.bad_connection_flag:
client.loop_stop() #Stop loop
sys.exit()
# Send autoconfig messages and subscribe to command topics
init()
# Main loop
while True:
try:
#print("still running")
# publish availability?
# publishAvailability(Heos1Name)
# publishAvailability(Heos2Name)
# publishAvailability(Heos3Name)
# publish 5x in expiration time
time.sleep(60)
except KeyboardInterrupt:
client.loop_stop() #stop connection loop
client.disconnect() #gracefully disconnect
client.connected_flag=False #reset flag
poseLogFile.close()
rawLogFile.close()
print("Ending program")
exit()
Also: as a bonus, I'm trying to render the walls!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.