 Jacob David C Cunningham
Jacob David C CunninghamI kind of ran out of time today but I am working on it.
I have decided to move forward with the gaits that I have now (Regis Hsu 2017 spider robot) and current sampling pattern.
I took some measurements today, I am working on a C++ based "algorithm" to process the 5 sample planes for the obstacle detection/box-bounding.
This is top of my project priority again I just wanted to get outside/had to finish my camera external display project and also do day job. I also fixed my DLG but need to design a carrier for it.
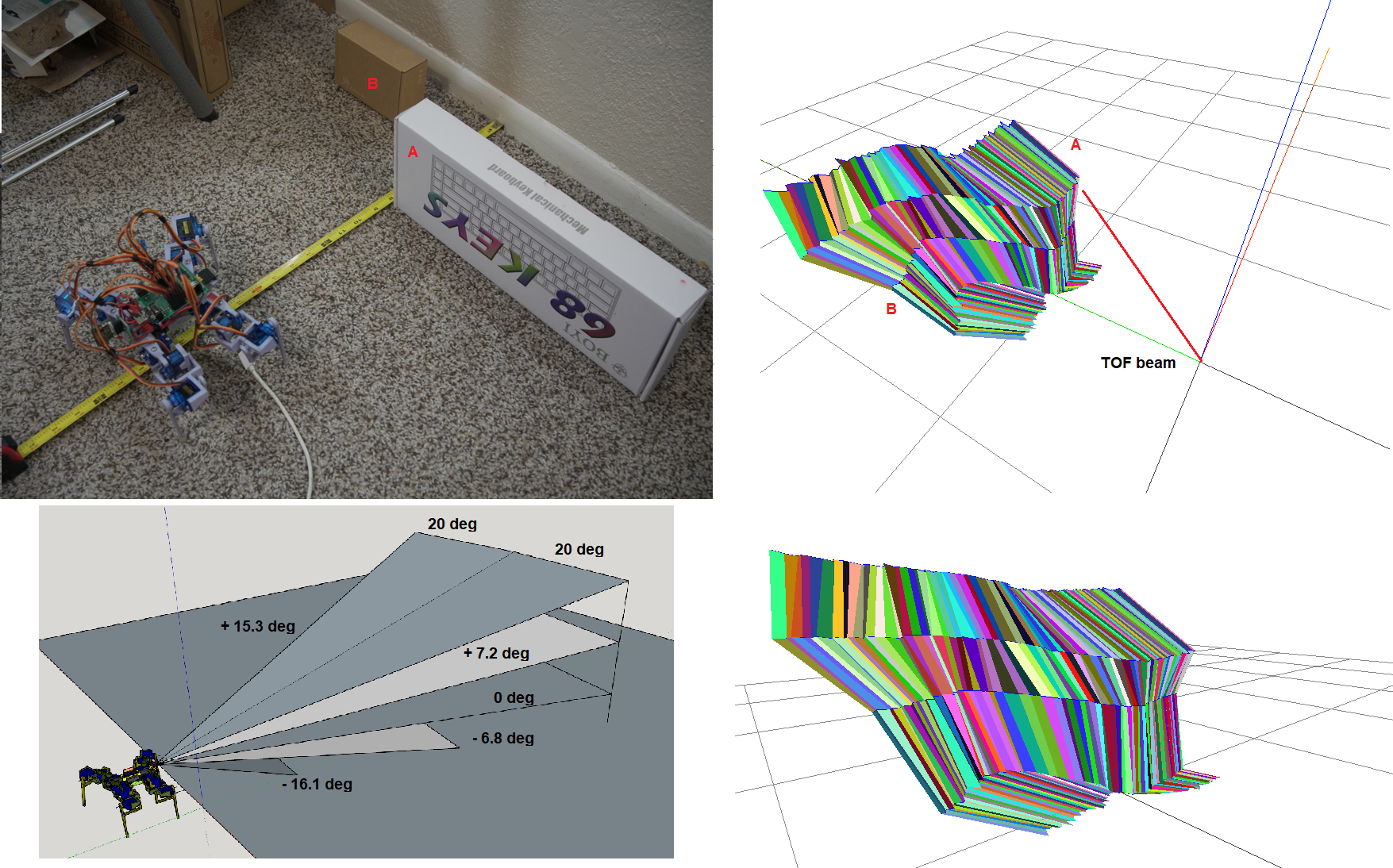
I'm also done doing these samples for the Three JS it's too much data to transmit with the ESP-01, keeps having buffer problems, so I'm doing all the math on the Teensy then sending basic coordinates/sizes of box-obstacles.
Can see below what I do to make the mesh plot above.
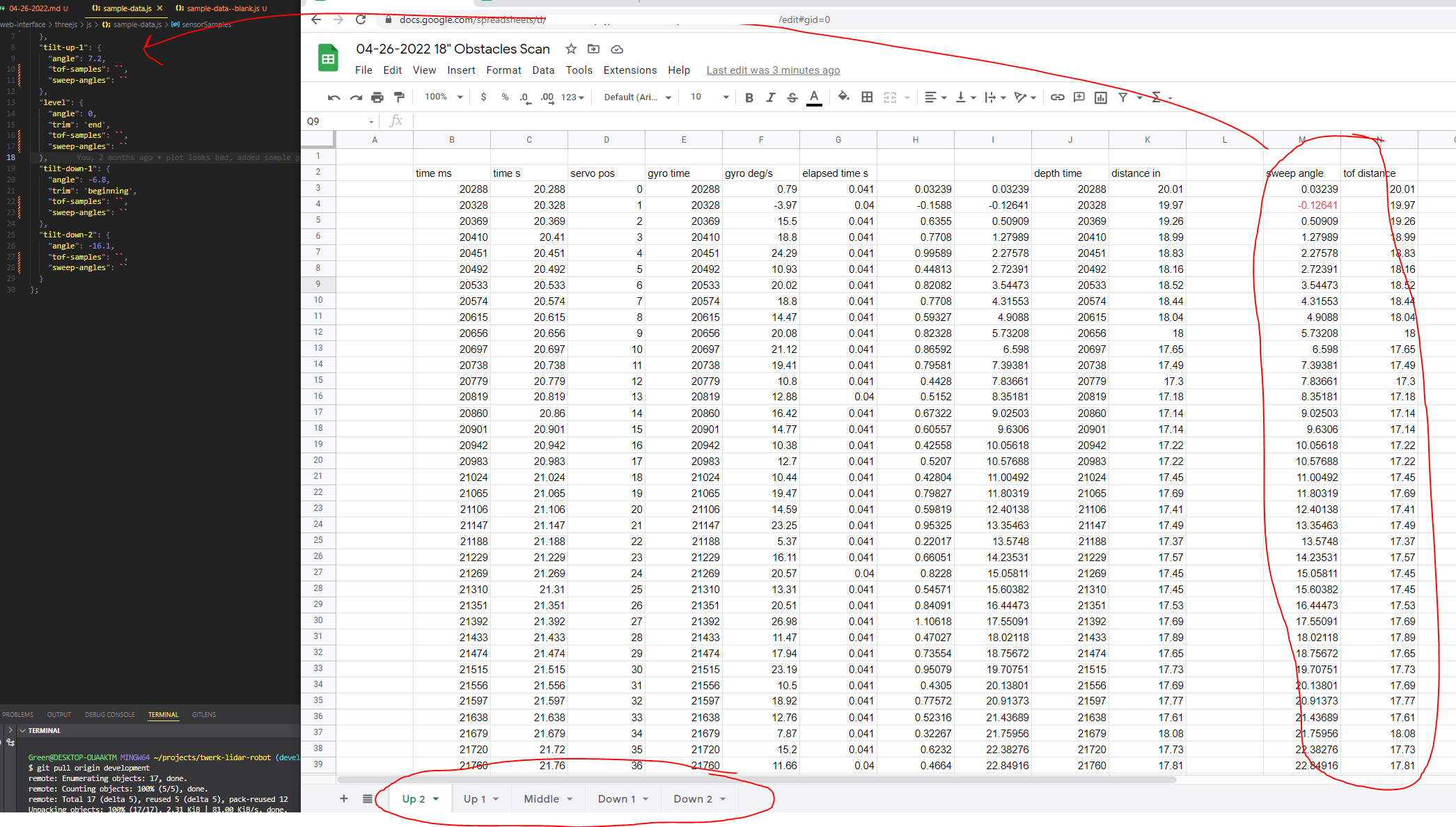
mesh-plot.html chews through the right-side numbers on the left and creates the mesh above.
I also have not fixed the offset orb deal with the ToF sensor.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.