 Jacob David C Cunningham
Jacob David C Cunningham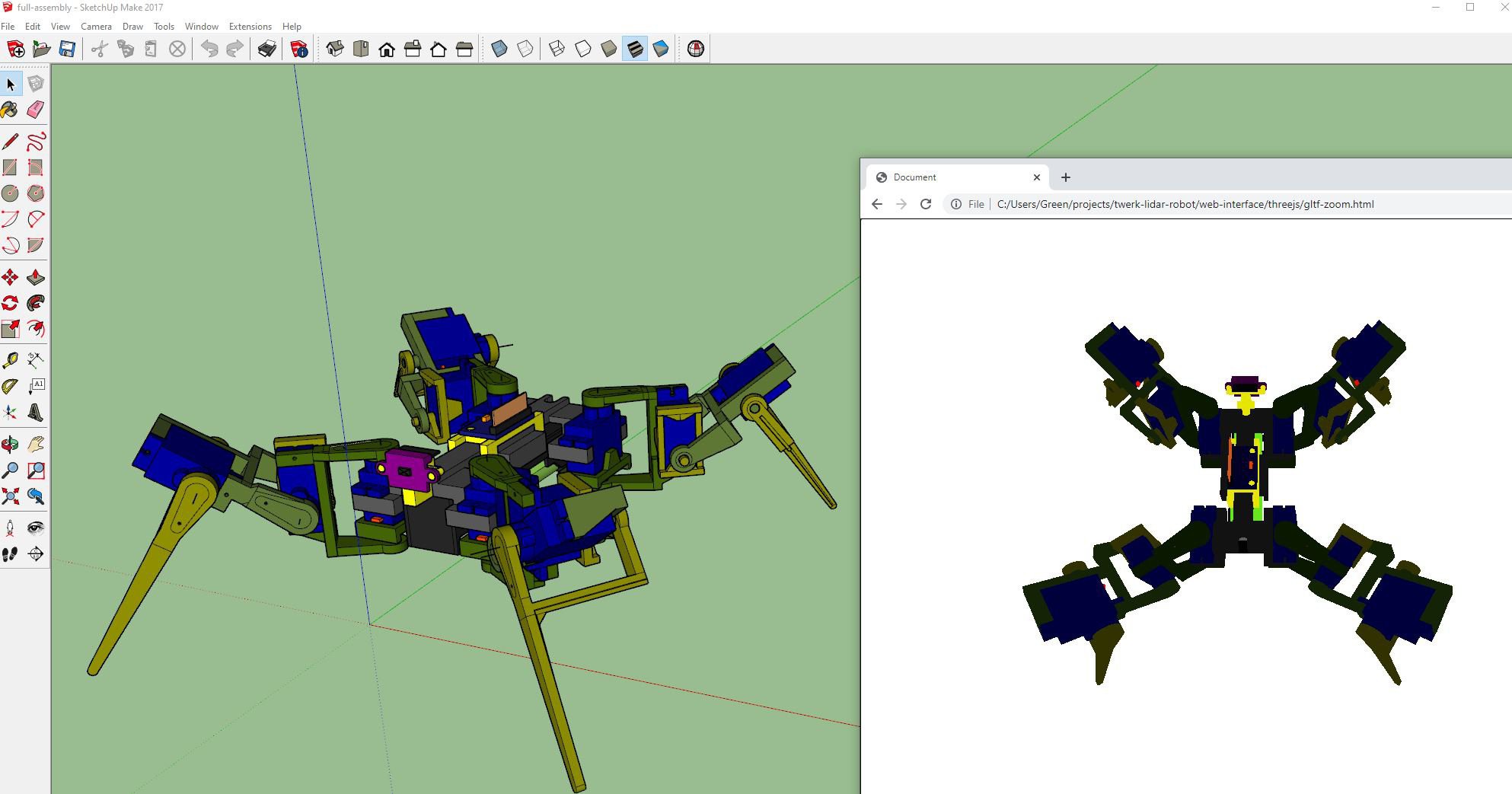
So just a little update on myself, I'm currently on the job hunt so I'll be delayed on posting any significant progress on this project. My aim is to be employed within June I've been working on this startup that has not taken off and I'm broke ha.
Anyway here is this update, I checked in the past if this could be done and it turns out it is possible. In SketchUp I export the model (entire thing right now) via glTF export plugin, then I load it in ThreeJS.
The full way to do this is to split up the model in parts and import them individually then positioning them for the "standing" pose and then program in the gaits virtually to show the walking animation as the robot moves in real life. Of course the motion is not tied to the real thing other than it is walking or not.
Another thing I'd like to address is to make the gaits dynamically set eg. by inverse kinematics like a real robot vs. manually programming in the gaits. Then it would be nice to be able to easily change the direction it moves as it walks if it's turning slowly to the left for example.
Note that I just got this to work in like 30 minutes so it sucks but it does work. I'll have to work on the lighting too as it is a bit dark. It is gonna suck programming the parts to move via raw JS and ThreeJS haha... you're probably supposed to animate it in Blender or something then export the code into JS. I'll probably do a lazy/generalized version where the entire leg moves vs. each joint.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.