 Jacob David C Cunningham
Jacob David C Cunningham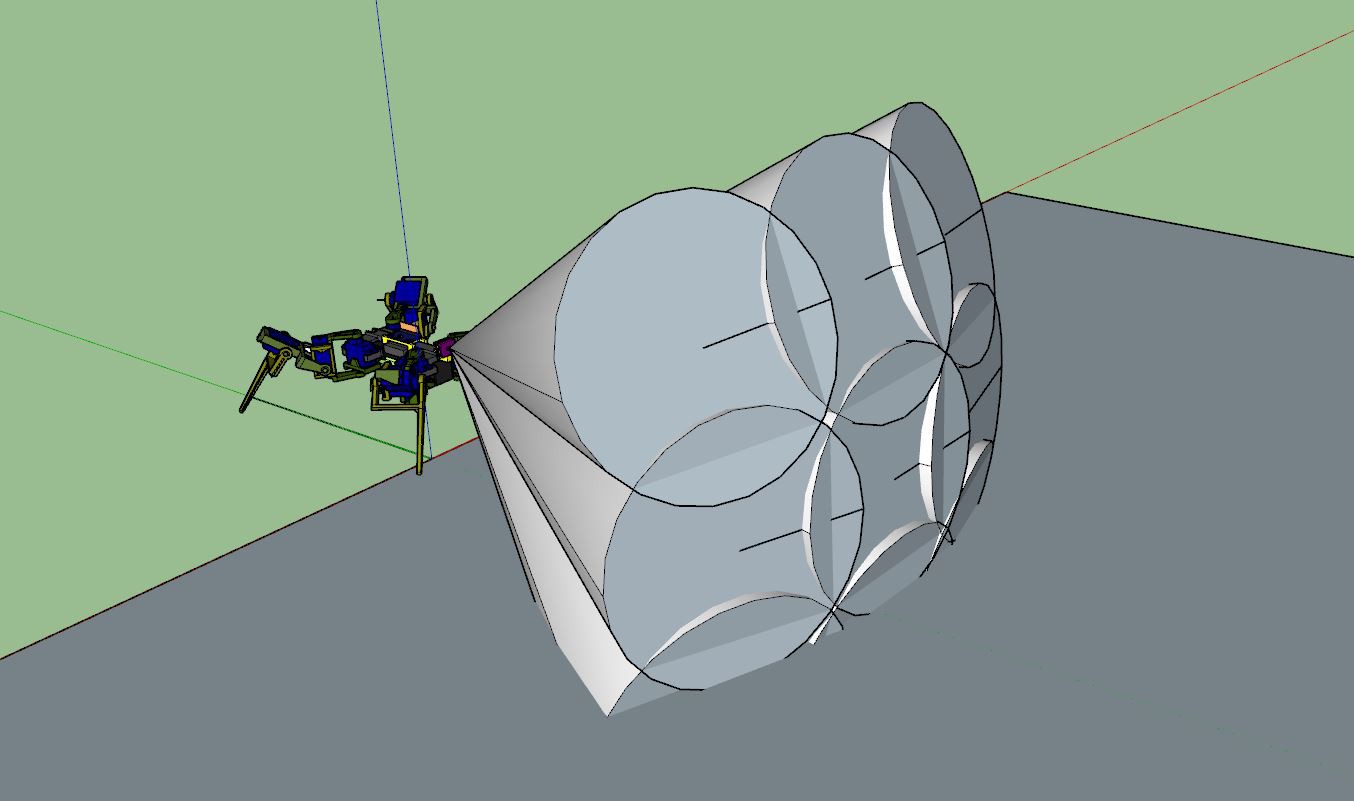
So yeah... while discussing the sensor with someone they pointed out that it doesn't shoot a straight line/laser, that it actually makes a cone with 25 degrees FOV... so it looks like the above. What I had assumed in the past is the beam is a line and I was panning every degree to make 5 roughly 2D slices. But it actually looks something like the above. So at the moment I am now scanning every 4th degree (might lower to 3 just because) and the outer ends. This makes the scanning process much faster.
I also am reworking the web interface... it is still crap because I'm not using a SPA or any pattern/standards. I'm just injecting things as needed. But you can see in the short video below the demo of the upside down alerting.
Anyway I'll keep working on this. One thing I'll add is the backward gait and a crab gait (left/right) so that it can get away from a wall (this is a problem) and for this to work, I will need to use the IMU to make sure it's moving/not stuck based on expected IMU values.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.